00191370-02.pdf - 第190页
6 Fonctions du sys tème Vision Manuel d’utilisation HS-50 6.2 Système Vision des PCB Version du logiciel SR.501.xx Editi on 12/99 FR 190 t I I t La camér a vidéo à PCB m ontée s ur le po rtique et le pr ogramme vidéo per…

Manuel d’utilisation HS-50 6 Fonctions du système Vision
Version du logiciel SR.501.xx Edition 12/99 FR 6.2 Système Vision des PCB
189
t IIt
– deux interfaces sérielles (RS232 pour COM1 à l’aide d’une fiche à 25 pôles SUBD et pour
COM2 à l’aide d’une fiche à 9 pôles SUBD)
– les signaux de déclenchement (Trigger) et signaux flash (fiche plate à 10 pôles)
ainsi que des DEL d’affichage d’état 6
–de la CPU (CFG)
– du processeur vidéo (ACA)
– de l’entrée de la caméra (BCA)
– de l’affichage écran (DISP)
sont agencées sur le panneau avant du module VME. 6
Les commutateurs de "REINITIALISATION" et "INTERRUPTION" sont placés sous les DEL d’af-
fichage d’état. 6
6.2.2 Caractéristiques techniques
Caméra:SONY XC75 6
Nombre des points d’image: caméra 768 (H) x 494 (V), image 640 (H) x 484 (V) 6
Champ de vision: 5,7 mm x 5,7 mm 6
Méthode d’éclairage: par réflexion (activée au cours de la mesure) 6
Traitement des images: suivant le principe de corrélation, système d’évaluation des
demi-teintes 6
Ecran: moniteur RGB (mode VGA-Modus) 640 x 484 pixels du calcu-
lateur de station 6
Marques: mémoire en bibliothèque d’au moins 255 définitions de marque 6
6.2.3 Description fonctionnelle
Le système Vision des PCB définit la position, l’angle de rotation et le cisaillement du PCB avant
de le reporter, en fonction des positions de ses marques. Les écarts des valeurs théoriques sont
inclus aux positions de report des composants sous la forme de valeurs de correction. 6
Au moins 2 marques doivent être apposées sur un PCB, afin que le système puisse détecter les
écarts de la position et de l’angle de rotation du PCB. Des informations supplémentaires sur la
déformation et le déport du PCB et de son layout sont obtenues en y apposant 3 marques. 6
6.2.4 Déroulement opérationnel
Une marque doit tout d’abord être soumise à un ’apprentissage’ avant de pouvoir être utilisée pour
la reconnaissance du positionnement du PCB, c-à-d. que les paramètres afférents à la structure
des marques du modèle doivent être enregistrés dans le système Vision des PCB. 6
6 Fonctions du système Vision Manuel d’utilisation HS-50
6.2 Système Vision des PCB Version du logiciel SR.501.xx Edition 12/99 FR
190
t IIt
La caméra vidéo à PCB montée sur le portique et le programme vidéo permettent de soumettre
la structure de la marque à un apprentissage. L’unité d’analyse Vision définit, par des méthodes
sortant du traitement numérique des images, les paramètres les plus significatifs afférents à la
structure des marques: 6
– un procédé 2D de comparaison modèle-marque (procédé bidimensionnel) dans une grille
grossière et détermination provisoire des coordonnées des marques
– un procédé 1D de comparaison modèle-marque (procédé monodimensionnel) permettant
la définition exacte de la position des marques.
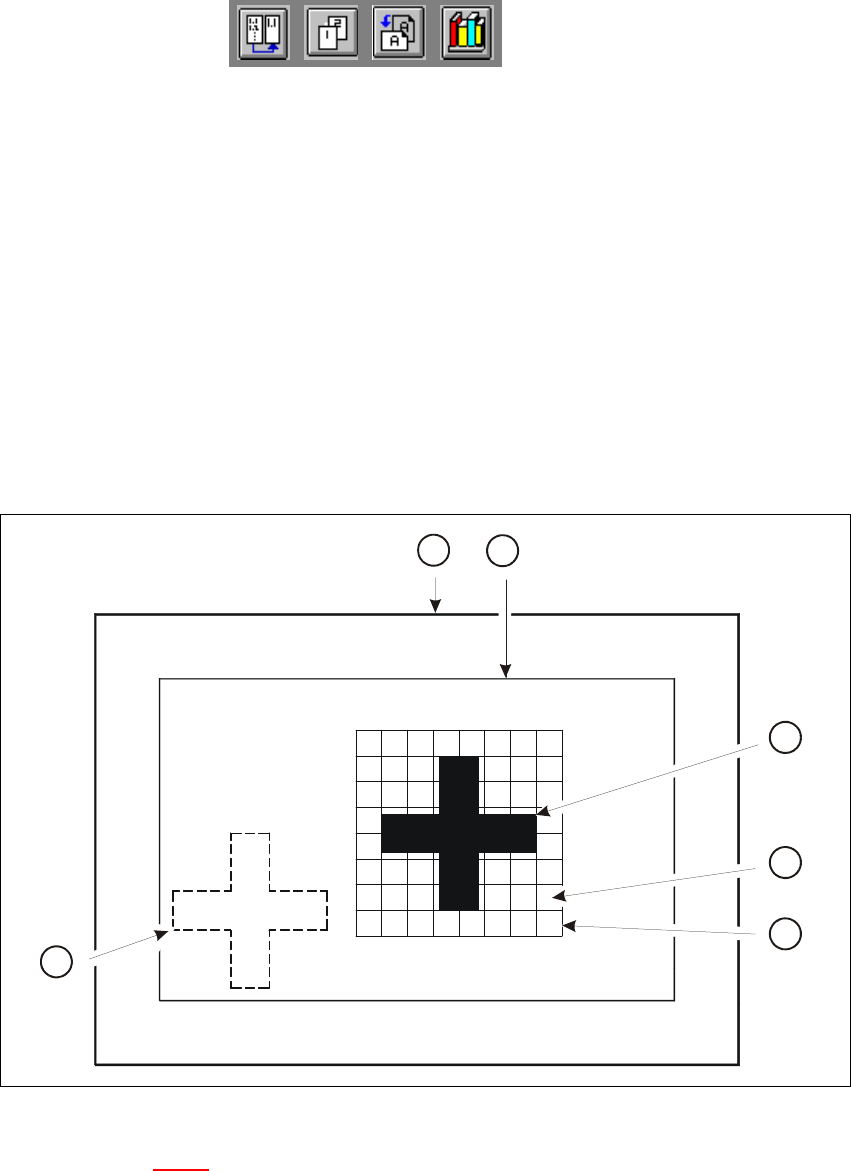
La fenêtre de reconnaissance du modèle est divisée en champs de points d’image mosaïques ou
moxels au cours du procédé de comparaison modèle-marque 2D. Les moxels (pixels mosaïques)
sont des champs de points d’image comprenant, par ex., 16 x 16, 8 x 8 points d’image, etc. Plus le
nombre des pixels est petit, plus grande est la résolution et plus basse est la vitesse de recherche.6
6
Fig. 6.2 - 1 Explication du champ de vision de la caméra, champ de recherche
et fenêtre de recherche modèle
Légende de fig. 6.2 - 1
(1) Champ de vision de la caméra
(2) Champ de recherche ≤ champ de vision de la caméra (la marque y est recherchée)
(3) Marques de référence
(4) Moxel = champ de points d’image, par ex.16 x 16 pixels
(5) Fenêtre de recherche modèle (contient les marques de référence)
(6) Marque recherchée
4
2
5
6
3
1
Manuel d’utilisation HS-50 6 Fonctions du système Vision
Version du logiciel SR.501.xx Edition 12/99 FR 6.2 Système Vision des PCB
191
t IIt
La fenêtre de recherche modèle est balayée sur le champ de recherche à pas de moxel. Les va-
leurs des demi-teintes de chaque moxel de la marque de référence sont calculées durant cette
opération. Cette structure de données réduite contient assez d’informations sur la structure gros-
sière et la position de la marque de référence. 6
NOTE 6
Choisir une fenêtre de recherche aussi petite que possible, afin d’obtenir une vitesse élevée de
recherche. Veiller cependant à ce qu’elle soit suffisamment grande, afin de pouvoir identifier la
marque de façon univoque.
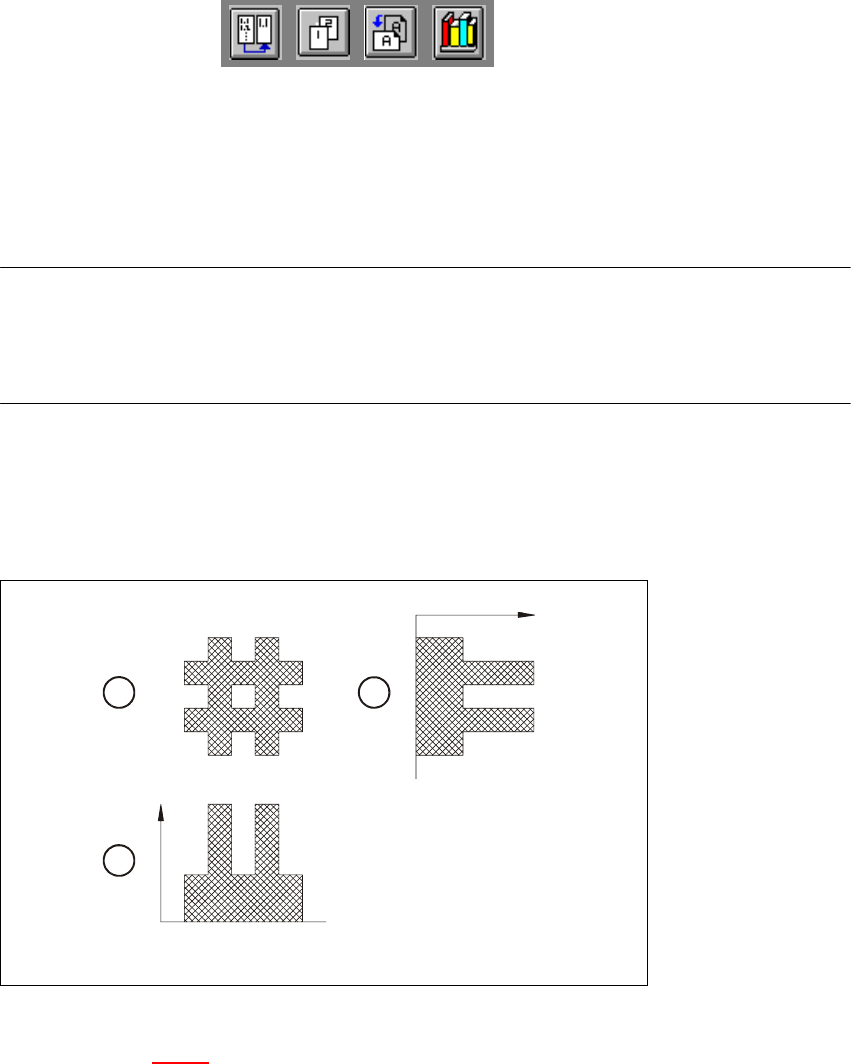
Utiliser le procédé 1D de comparaison modèle-marque pour définir exactement le modèle et la
position de la marque. La reproduction de la marque est fractionnée en lignes et en colonnes, et
les valeurs des demi-teintes sont additionnées dans chaque ligne et colonne. L’illustration ci-
après explique ce processus à l’aide d’une double croix. 6
6
Fig. 6.2 - 2 Profil des lignes et colonnes d’une double croix
Légende de fig. 6.2 - 2
(1) Marque
(2) Somme des valeurs des demi-teintes par colonne: profil des colonnes
(3) Somme des valeurs des demi-teintes par ligne: profil des lignes
– La position de la marque est exactement déterminée en fonction des profils horizontaux et ver-
ticaux. Les paramètres de la structure de la marque saisis sont enregistrés dans le calculateur
de ligne après l’apprentissage.
– Le modèle enregistré est alors testé. A cet effet, le portique transporte la caméra à PCB au-
dessus du PCB; la caméra balaye les 4 angles du champ de recherche (worst case). Le sys-
tème Vision doit réidentifier la marque quatre fois durant ce test.
1
2
3