00191370-02.pdf - 第265页
Manuel d’utilisation HS-50 6 Fonctions du système Vision Version du logiciel SR.501.xx Edition 12/99 FR 6.6 Tester c omposant 265 t I I t Appuyer sur la touche " ESC" pour qui tter cette option . L ’image vid é…
6 Fonctions du système Vision Manuel d’utilisation HS-50
6.6 Tester composant Version du logiciel SR.501.xx Edition 12/99 FR
264
t IIt
6
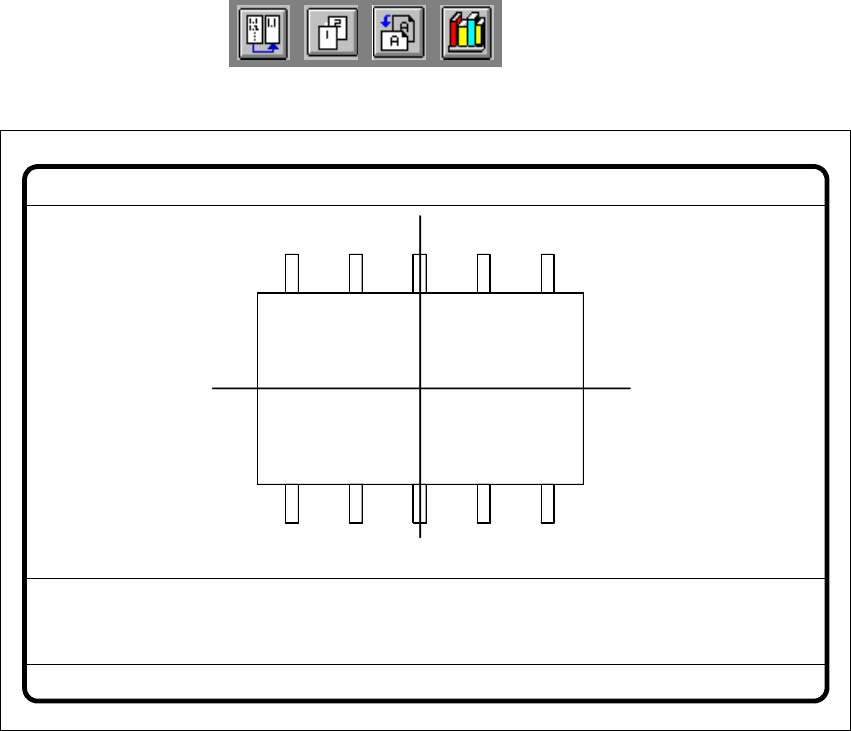
Fig. 6.6 - 21 Menu "Tester composant", image vidéo "mesurer compos."
Mesure optique des composants traditionnels dotés de pattes 6
Le réticule signalise le centre de gravité du composant. Les contours du composant sont souli-
gnés par des couleurs. 6
Les valeurs mesurées correspondent aux paramètres géométriques du composant, tels que 6
– divergence des pattes
La valeur correspondant à la divergence des pattes est affichée après avoir sélectionné le
mode de mesure "Lead".
–pas
La valeur correspondant au pas des pattes est affichée après avoir sélectionné le mode de
mesure "Corner" comme dernière étape de mesure.
– nombre des pattes
– décalage en X- / Y
– orthogonalité
– dimensions du composant
– décalage de l’angle de rotation et
– coefficient de qualité de la mesure.
mesurer compos. for me boît. = 5
offs. X. = ... offs. Y = ... Phi [deg] = ...
ort. [°] = ...
nombre pattes = ...
qualité = ...
long. [mm] = ...
largeur [mm] = ...
espacem [mm] =
RET: mesurer composant
P. dev. [mm] =

Manuel d’utilisation HS-50 6 Fonctions du système Vision
Version du logiciel SR.501.xx Edition 12/99 FR 6.6 Tester composant
265
t IIt
Appuyer sur la touche "ESC" pour quitter cette option. L’image vidéo disparaît, et le menu
"Tester composant" est de nouveau affiché sur l’écran. 6
Recouvrement en couleur des différentes méthodes de mesure en mode pas à pas 6
1. Size Mode 6
La définition des méthodes de mesure est libellé dans paragraphe 6.6.4.14
, à partir de page
289
. 6
Cette méthode de mesure se distingue par les fenêtres navigeant autour des arêtes du composant. 6
Procédure 6
(1) Des profils sont dessinés en X et Y au sein de la fenêtre de recherche. La position
approximative du composant est déterminée en fonction des gradients et d’un filtre géomé-
trique.
(2) Les fenêtres circulent autour des arêtes du composant. Le profil et les gradients sont définis
pour chaque fenêtre. La somme des gradients représente une grandeur de cohérence de
l’angle de la fenêtre et de la position du composant.
La position angulaire du composant est déterminée, lorsque la somme des gradients
correspond au maximum.
(3) Le premier pas de mesure (1) est répété, lorsque l’angle évalué sous (2) est inférieur à la
valeur théorique. La position du composant en X et Y peut être alors déterminée plus
précisément.
Rectangles: 6
verts: écarts limite de prise en X et Y 6
orange: dimensions du composant et écarts limite transmis par la station 6
bleus: fenêtre de recherche appropriée à la reconnaissance du positionnement6
Remarques 6
1. Veiller à ce que la position détectée du composant soit au sein du rectangle
vert.
Sinon, le composant ne sera pas reporté. 6
Valable pour tous les pas de mesure! 6
2. Veiller à ce que le composant soit positionné au sein de la fenêtre de cou-
leur oran-
ge. Sinon, les résultats de mesure sont douteux. 6
3. Veiller à ce que la fenêtre de recherche soit au même niveau que le com-
posant et
que sa taille soit plus grande que celle du composant.
6

6 Fonctions du système Vision Manuel d’utilisation HS-50
6.6 Tester composant Version du logiciel SR.501.xx Edition 12/99 FR
266
t IIt
Lignes:
rouges: arêtes détectées du composant 6
Remarques: 6
Les lignes de couleur rouge sont souvent cachées par d’autres lignes, si bien qu’on ne
peut pas les détecter. 6
Recouvrement: 6
gris: profil en sens d’intégration correspondant 6
bleu: gradients obtenus des profils susmentionnés 6
jaune: résultat obtenu du filtre géométrique 6
rouge: bornes d’interpolation appropriées à la détermination de la position 6
bleu clair: résultats de l’interpolation -> position 6
Remarques: 6
Le résultat de l’interpolation devrait correspondre quasi au résultat maximum obtenu par le
filtre géométrique. 6
6
Croix: 6
blanche: résultat de la reconnaissance du positionnement -> X, Y, angle 6
Grafique: 6
fonction de résultat de la recherche de l’angle (fenêtre rotative). 6
Remarques: 6
Le minimum (correspond au maximum de la somme des gradients) indique la position an-
gulaire non interpolée. Le résultat final (obtenu par interpolation) est indiqué par une ligne
de couleur bleu clair. La précision du graphique dépend de la résolution du moniteur. 6
6
2. Row Mode 6
La définition des méthodes de mesure est libellée dans paragraphe 6.6.4.14
, à partir de page
289
. 6
Cette méthode de mesure se distingue par quelques fenêtres disposées sur les pattes centrales
faisant partie d’une rangée de pattes: 6
(1) La reconnaissance de position s’opére par formation du profil, verticalement par rapport au
sens de la série. Les arêtes du composant sont ainsi déterminées.
(2) Deux fenêtres supplémentaires permettent de déterminer la position angulaire du composant.