00191370-02.pdf - 第44页
1 Introduction, Caractéristiques techniques Manuel d’utilisation HS-50 1.13 Vue d’ensemble du sous-groupe - Tête revolver Version du logiciel SR.501.xx Edition 12/99 FR 44 t I I t T o us les compos ants sont r eportés d …
Manuel d’utilisation HS-50 1 Introduction, Caractéristiques techniques
Version du logiciel SR.501.xx Edition 12/99 FR 1.13 Vue d’ensemble du sous-groupe - Tête revolver
43
t IIt
1.13 Vue d’ensemble du sous-groupe - Tête revolver
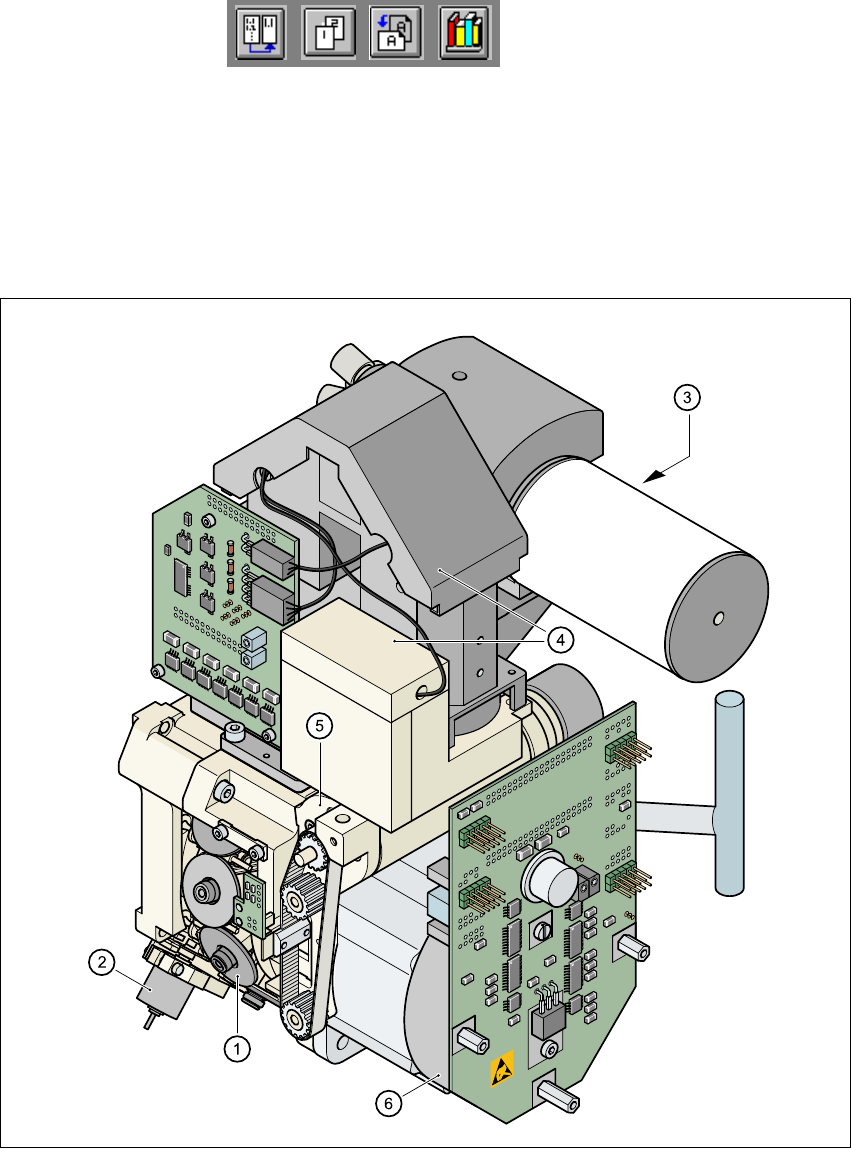
1.13.1 Constitution de la tête revolver 12 buses
1
Fig. 1.13 - 1 Constitution de la tête revolver 12 buses
1
(1) Barillet équipé de 12 fourreaux (2) Servomoteur asservissant la soupape "rejet"
(3) Poste de rotation (4) Système Vision des composants
(5) Entraînement de l’axe Z (6) Moteur en étoile
1 Introduction, Caractéristiques techniques Manuel d’utilisation HS-50
1.13 Vue d’ensemble du sous-groupe - Tête revolver Version du logiciel SR.501.xx Edition 12/99 FR
44
t IIt
Tous les composants sont reportés d’après le même temps de cycles. Avant d’être reporté, le
composant est mesuré opto-électroniquement à l’aide du système Vision. 1
– La caméra de reconnaissance optique des composants reproduit le tracé du composant
prélevé.
– La position exacte du composant est également définie.
– La forme du boîtier du composant prélevé est comparée à la forme de boîtier programmée,
afin d’identifier le composant. Les composants non identifiés sont rejetés.
– Le poste de rotation tourne le composant dans la position de report exigée.
1.13.2 Description de la tête revolver 12 buses
– La tête revolver 12 buses fonctionne d’après le principe de Collect & Place (prendre et placer),
c-à-d. que les composants sont prélevés par les pipettes sous l’action d’une dépression et en-
suite déposés doucement et exactement sur le PCB sous l’action d’air d’expulsion, après avoir
parcouru un cycle de prise complet.
– Le mode de tamponnage des capteurs "adaptatif" de l’axe Z égalise les inégalités du PCB lors
de la dépose des composants.
– Les composants défectueux sont rejetés et reportés au cours d’un cycle de réparation.
1.13.3 Caractéristiques techniques - Tête revolver
Gamme des composants
0402 à PLCC44, y compris BGA, µBGA, Flip-Chip,
TSOP, QFP, PLCC, SO à SO32, DRAM
Epaisseur maxi des composants 6 mm
Trame mini des pattes 0,5 mm
Dimensions mini 0,5 mm x 1,0 mm
Dimensions maxi 18,7 mm x 18,7 mm
Poids maxi 2 g
Course maxi de l’axe Z 16 mm
Force de pose programmable 2,4 à 5,0 N
Types de pipette série 9xx
Cadence de report suivant Benchmark 12.500 comp./h
Précision angulaire 0,7°à 4 sigma
Précision de report
± 90 µm à 4 sigma
± 135 µm à 6 sigma
Manuel d’utilisation HS-50 1 Introduction, Caractéristiques techniques
Version du logiciel SR.501.xx Edition 12/99 FR 1.14 Vue d’ensemble du sous-groupe - Systèmes Vision
45
t IIt
1.14 Vue d’ensemble du sous-groupe - Systèmes Vision
Chaque machine automatique de report est équipée de 1
– quatre caméras de reconnaissance optique des composants et de
– quatre caméras de reconnaissance optique des PCB montées sur la face inférieure des
portiques des axes X.
1
Les unités d’analyse optique sont intégrées à la baie de commande de la machine. Le système
Vision des composants définit 1
– la position exacte du composant adhérant à la pipette et
– la géométrie du boîtier.
1
Le système Vision des PCB définit, à l’aide de marques apposées sur les PCB, 1
– la position du PCB
– son angle de rotation
– et son déport.
1
En sus, le système Vision des PCB définit, à l’aide de marques apposées sur les modules de dis-
tribution, la position de prise exacte des composants. Cette procédure joue en particulier un grand
rôle lors du traitement de composants de petite taille. 1
1.14.1 Caractéristiques techniques - Module de vision des composants monté sur
la tête revolver 12 buses
Dimensions maxi des composants 18,7 mm x 18,7 mm
Gamme des composants
0402 à PLCC44
y compris. BGA, µBGA, Flip-Chip, TSOP, QFP
PLCC, SO à SO32, DRAM
Pas des pattes > = 0,5 mm
Champ de vision 24 mm x 24 mm
Eclairage par réflexion (3 niveaux programmables)