00195375-05_SM_D1_D1i_D2_D2i_DE.pdf - 第209页
Einstellungen 6.2.2 Achskarte A364 Anticrash-Funktion Portale Serviceanleitung SIPLACE D1/D1i/D2/D2i 209 6.2.2 6 . 2 . 2 A c h s k a r t e A 3 6 4 A n t ic r a s h - F u n k t io n Achskarte A364 Anticrash-Funktion 6.2.2…
Einstellungen
Portale 6.2.1 Verfahrbereiche und Geschwindigkeitsüberwachung
208 Serviceanleitung SIPLACE D1/D1i/D2/D2i
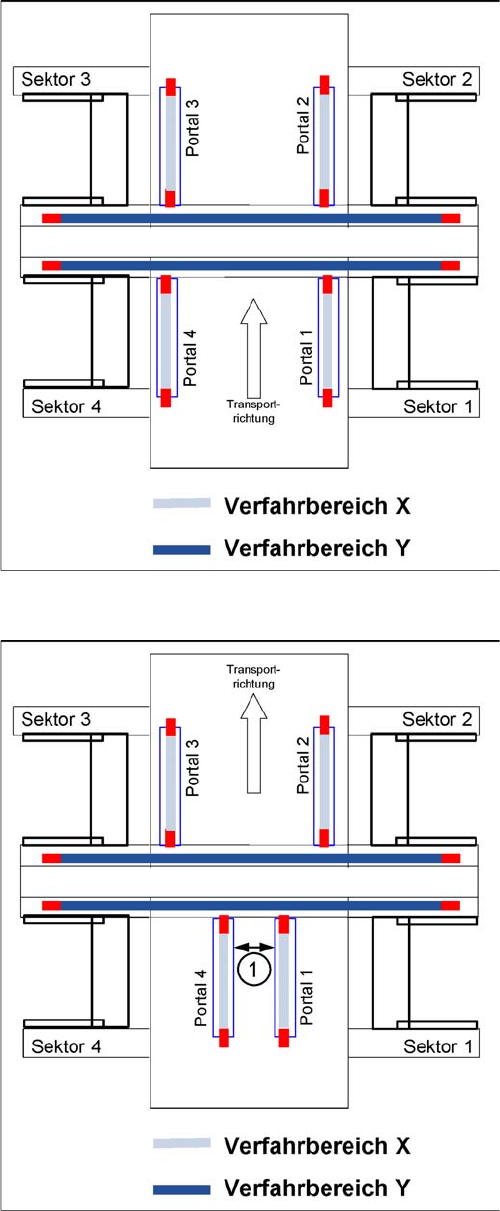
Verfahrbereiche der X- und Y-Achsen (am Beispiel D4)
Das Verfahrbereichsende der X-Achse liegt +/- 0,5 mm
vor dem Puffer. Dieser Sicherheitsabstand reicht aus,
wenn die X-Achse mit überhöhter Geschwindigkeit in die-
sen Bereich fährt.
Das Verfahrbereichsende der Y-Achse liegt +/- 1,5 mm
vor dem Puffer. Die Verfahrbereichüberwachung der Y-
Achsen in einem Bestückbereich erfolgt über Software.
Ein ständiger Kommunikationsaustausch erfolgt über
den SPI-Bus zwischen beiden Y-Achsen und deren Posi-
tionen.
Verfahrbereiche der X- und Y-Achsen (am Beispiel D4)
1. Bei der Kalibrierung des Verfahrbereiches der X-Ach-
se, fährt die Achse soweit in ihre minimale bzw. ma-
ximale Position bis sie den Puffer berühren.
Entsprechend eines Sicherheitsabstandes wird der
Verfahrbereiche errechnet.
2. Für die Y-Achse im Bestückbereich fährt das Portal 1
in die minimale und das Portal 2 in die maximale Po-
sition.
3. Sicherheitsabstand zwischen den Portalen während
des Bestückens: minimal 4mm.
Einstellungen
6.2.2 Achskarte A364 Anticrash-Funktion Portale
Serviceanleitung SIPLACE D1/D1i/D2/D2i 209
6.2.2
6.2.2 Achskarte A364 Anticrash-Funktion
Achskarte A364 Anticrash-Funktion
6.2.2.1
6.2.2.1 Anticrash-Funktion auf der A364
Anticrash-Funktion auf der A364
▪ Die Anticrash-Funktion wird nicht mehr über die Anticrash-Platine realisiert, sondern über die Soft-
ware der A364 (Applikation 1). Somit fallen die BEROs für die Verfahrbereichsüberwachung und der
Sensor für die Überwachung des Portalabstandes weg.
▪ Aufgaben:
– Überwachung der Verfahrbereiche X- und Y-Achse
Auswertung der Ist-Position der jeweiligen Achse in Richtung der Puffer, abhängig von der Ge-
schwindigkeit.
– Überwachung des Abstandes beider Y-Achsen in einem Bestückbereich
Auswertung der Ist-Position des eigenen Portals und des Partnerportals bei der Portalcrash-
Überwachung.
– Zählfehlerüberwachung der Portalachse
Überwachung der eingehenden Zählimpulse (Flankenüberwachung), in Abhängigkeit von der
Zeit.
6.2.2.2
6.2.2.2 Ablauf Anticrash-Überwachung auf der A364
Ablauf Anticrash-Überwachung auf der A364
Die Aktivierung der Anticrash-Funktion erfolgt nachdem die Achsen X/Y referiert wurden. Beim erstma-
ligen Referenzieren der Portalachsen ist die Anticrash-Überwachung nicht aktiv, was durch die geringe
Verfahrgeschwindigkeit unkritisch ist.
Danach wird das Bit für die Anticrash-Überwachung gesetzt und über den SPI-Bus erfolgt dann eine
ständige Kommunikation über die Ist-Position des jeweiligen Partnerportals.
Folgende Informationen werden zwischen den Y-Achsen ausgetauscht:
▪ Ist-Position und Geschwindigkeit des eigenen Portals
▪ Statusinformationen (Referierzustand, Zustand der Anticrash-Überwachung).
6.2.2.3
6.2.2.3 Fehler "Portalcrash"
Fehler "Portalcrash"
Die Bestimmung des Fehlers “Portalcrash” erfolgt aus der Positions- und der Geschwindigkeitsdifferenz
beider Achsen. Der Fehler Portalcrash wird über die Achskarte und über den CAN-Bus gemeldet. Bei
beiden Achsen wird der Servo freigeschaltet und es müssen beide erneut referiert werden.
6.2.2.4
6.2.2.4 Zählfehler
Zählfehler
Wird über die Achskarte ein "Fataler Zählfehler" erkannt, wird die betroffene Achse freigeschaltet und
die Anticrash-Funktion deaktiviert. Dies bekommt die andere Achse über die Statusinformation mit und
deaktiviert die Anticrash-Funktion. Die freigeschaltete Achse muss neu referiert werden.
Danach wird die Anticrash-Funktion für beide Achsen wieder aktiviert.
Einstellungen
Portale 6.2.3 Beschreibungen der Leiterplatten am Portal
210 Serviceanleitung SIPLACE D1/D1i/D2/D2i
6.2.2.5
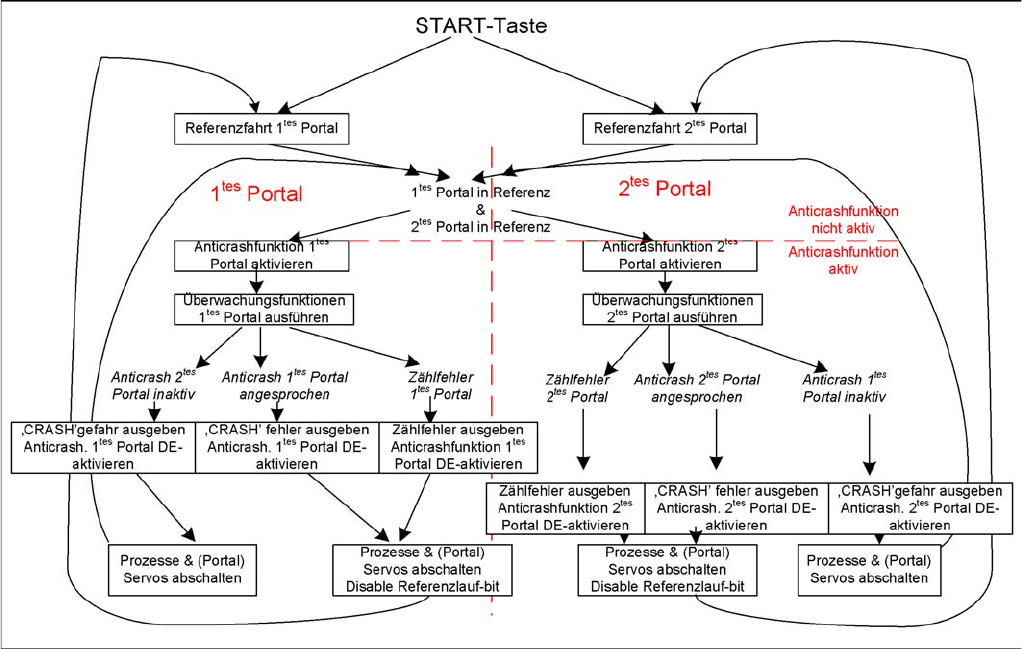
6.2.2.5 Ablauf Anticrash-Funktion
Ablauf Anticrash-Funktion
6.2.3
6.2.3 Beschreibungen der Leiterplatten am Portal
Beschreibungen der Leiterplatten am Portal
Die nachfolgend beschriebenen Leiterplatten am Portal sind grundsätzlich identisch und unabhängig
von der Kopfkonfiguration bei D1-, D2- und D4-Maschinen. Der CAN-Bus-Abschlusswiderstand ist fest
integriert auf dem Portal-Kopf-Verteiler.