00198607-02_SM_CP20P2_Kunde_DE.pdf - 第79页
11 Softwarefunktionen 11.1 Kalibrierung Serviceanleitung SIPLACE SpeedStar (C&P20 P2) 01/2019 79 11 Softwarefunktionen 11.1 Kalibrierung Übersicht Bei der Kalibrierung der BE-Kamera werden die folgenden Werte bestimm…
10 Sonstiges (Lüfter, Sicherungselemente)
10.2 Halter-Sicherungselemente und Halter tauschen
78 Serviceanleitung SIPLACE SpeedStar (C&P20 P2) 01/2019
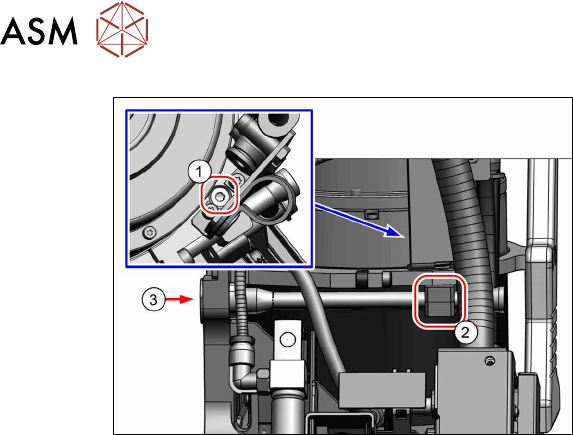
Abb.115: Halter links oben
Nur beim Halter links oben:
► Befestigen Sie die beiden Halter(2) mit
einer Schraube(1) (TX8, M3x16, Dreh-
moment 0,6Nm).

11 Softwarefunktionen
11.1 Kalibrierung
Serviceanleitung SIPLACE SpeedStar (C&P20 P2) 01/2019 79
11 Softwarefunktionen
11.1 Kalibrierung
Übersicht
Bei der Kalibrierung der BE-Kamera werden die folgenden Werte bestimmt:
das Verhältnis von "Pixelgröße der Kamera zur Auflösung des Messsystems der Maschine (X,Y)",
der "Kameramittelpunkt in X- und Y- Richtung" und der "Verdrehwinkel des CCD-Sensors in der
Kamera" bestimmt. Danach werden der Kopf-Offset und die Segment-Offsets oben und unten
bestimmt.
●
Kopf-Offset: Der Kopf-Offset ist der Abstand zwischen der LP-Kamera und der Pipette (Seg-
ment1). Der Sollwert ist ein festgelegter Wert (X=0 und Y=‑105mm), zu dem ein Offset-Wert
(aus der Kopfkalibrierung) dazugerechnet wird.
●
Segment-Offset oben: Beim Segment-Offset oben wird das Kalibrierteil in der BE-Kamera in
0°-, 90°-, 180°- und 270°-Schritten gedreht. Dabei wird der rotierende Mittelpunkt der
Pipettenspitze in Bezug auf die BE-Kameramitte in X- und Y-Richtung ermittelt.
●
Segment-Offset unten: Beim Segment-Offset unten wird das Kalibrierteil in 0°-, 90°-, 180°-
und 270°-Lage aufgenommen und vermessen. Dabei wird der rotierende Mittelpunkt der
Pipettenspitze bei ausgefahrener Z- Achse in Bezug auf die LP-Kamera ermittelt. Das Seg-
ment1 ist die Referenz (X=0,Y=0) zu den anderen Segmenten.
11.1.1 Ablauf der Kalibrierung
► Maschinennullpunkt
► LP-Kamera
– Kamera-Koeffizient (Abbildungsmaßstab in nm/pixel)
– Kalibrierung des LP-Kamera-Mittelpunktes
– Kalibrierung der Verdrehung der LP-Kamera zum Maschinen-Koordinatensystem
► Kalibrierteilposition (optional)
► Verfahrweg X-/Y-Achse (optional)
– Kalibrierung der min/max Verfahrwege der Portale
► Bestückkopf
– Druckregelventil (SIPLACE C&P20P2)
– Kamera-Koeffizient (Einheit -nm/pixel), Winkel
– Kopf-Offset (Offset LP-Kamera zu BE-Kamera)
– Segmentoffset II (unten)
– Segmentoffset I (oben)
► Pipettenwechsler
– Kalibrierung der Abholpositionen für alle Magazine
– Kalibrierung der Abholhöhe
– Kalibrierung der Abwurfposition
11 Softwarefunktionen
11.1 Kalibrierung
80 Serviceanleitung SIPLACE SpeedStar (C&P20 P2) 01/2019
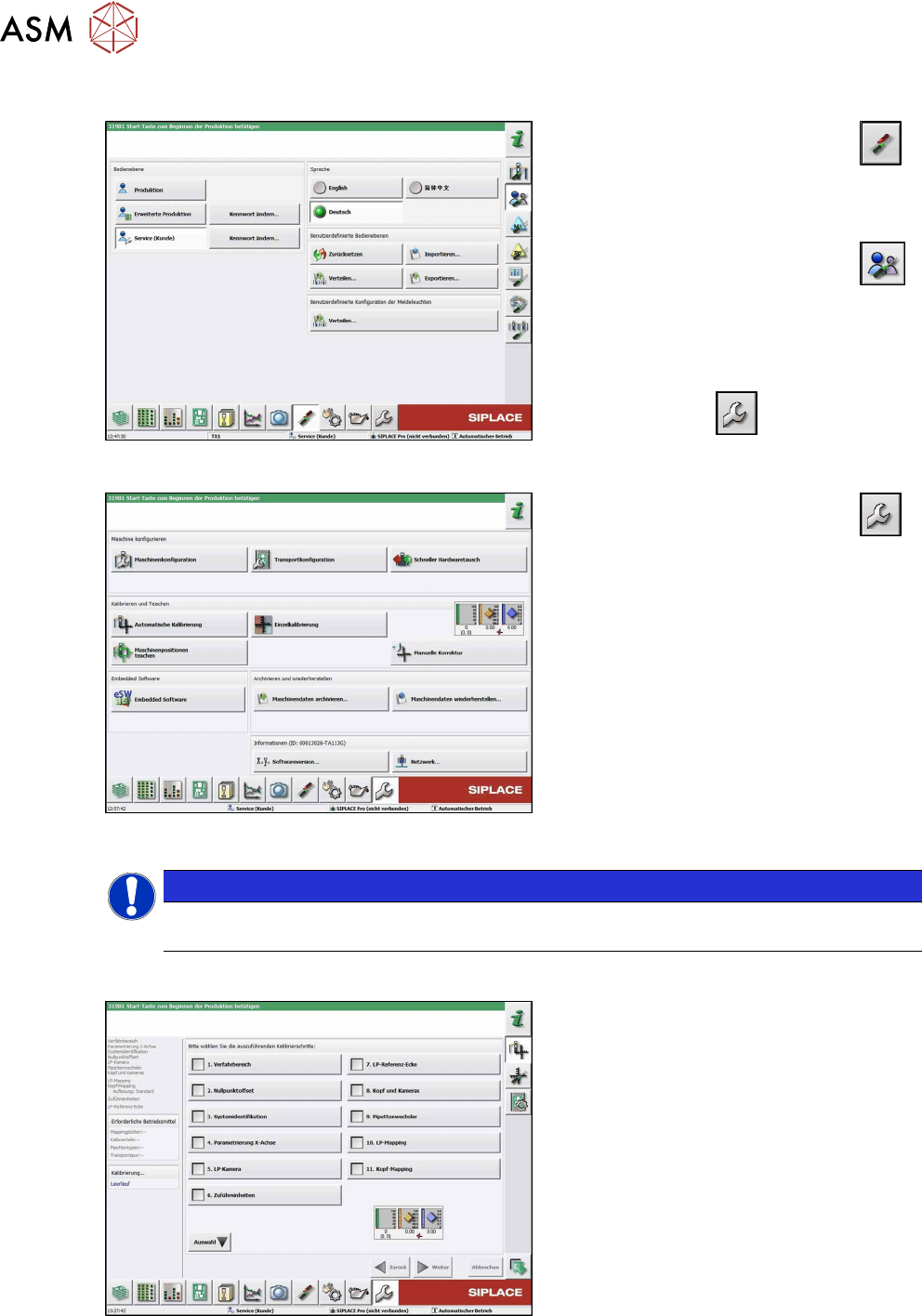
11.1.2 Köpfe und Kameras kalibrieren (SW7xx)
Abb.116: Bedienebene wählen
► Klicken Sie auf die Schaltfläche
,
um das Menü Maschine konfigurie-
ren, aktualisieren und kalibrieren
aufzurufen.
► Klicken Sie auf die Schaltfläche
,
um das Menü Benutzereinstellungen
überprüfen und festlegen aufzurufen.
► Wechseln Sie in die Bedienebene Ser-
vice (Kunde).
ð Der Button
erscheint.
Abb.117: Service Menü
► Klicken Sie auf die Schaltfläche
,
um das Menü Service aufzurufen.
► Klicken Sie auf die Schaltfläche Auto-
matische Kalibrierung.
HINWEIS
Mit der Stationssoftware 712.0 hat sich die Benutzeroberfläche der Automatischen Kali-
brierung geändert.
Bis SW 711.x
Abb.118: Automatische Kalibrierung
► Wählen Sie Kopf und Kameras aus.
► Wählen Sie die Schaltfläche Weiter.
Folgen Sie den Anweisungen auf den fol-
genden Seiten:
► Wählen Sie auf der nächsten Seite die
Portale aus, auf denen sich die zu kali-
brierenden Köpfe befinden und klicken
Sie auf die Schaltfläche Weiter.
► Als Nächstes werden die Bedingungen
für die Kalibrierung überprüft (Pipette,
Kalibrierteil, usw.). Folgen Sie den
Anweisungen.
Danach wird die Kalibrierung gestartet. Alle
notwendigen Zwischenschritte (Kopfhöhe,
etc.) werden automatisch durchgeführt.