OM-1351-003_w.pdf - 第56页
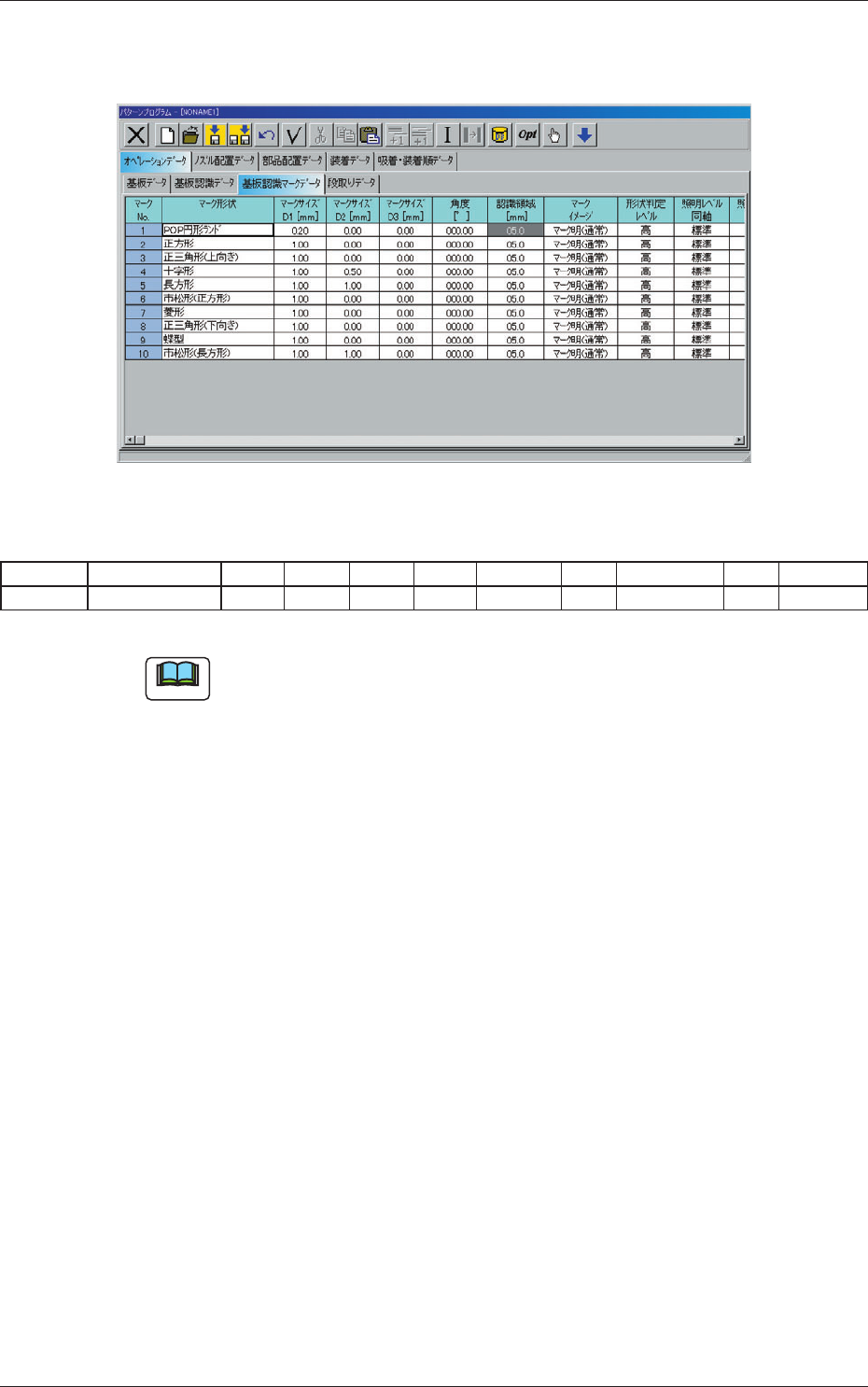
6-7 Tg1356-ID-SO 0609-003 • 基板認識マークデータはマーク形状に“POP 円形ランド”を設定しま す。 Fig.25 “基板認識マークデータ”タブシート Table 3 マーク No マーク形状 D1[mm] D2[mm] D3[mm] 角度 認識領域 明暗 判定レベル 同軸 リング 2 POP 円形ランド 0.20 0.00 0.00 000.00 05.0 明 高 標準 標準 ノート (a) “POP 円形…
6-6
Tg1356-ID-SO
0609-003
6.1.2 トップ部品の部品ライブラリ“制御データ”の設定
ボトム部品のランド認識をするためのマーク座標を設定します。
•
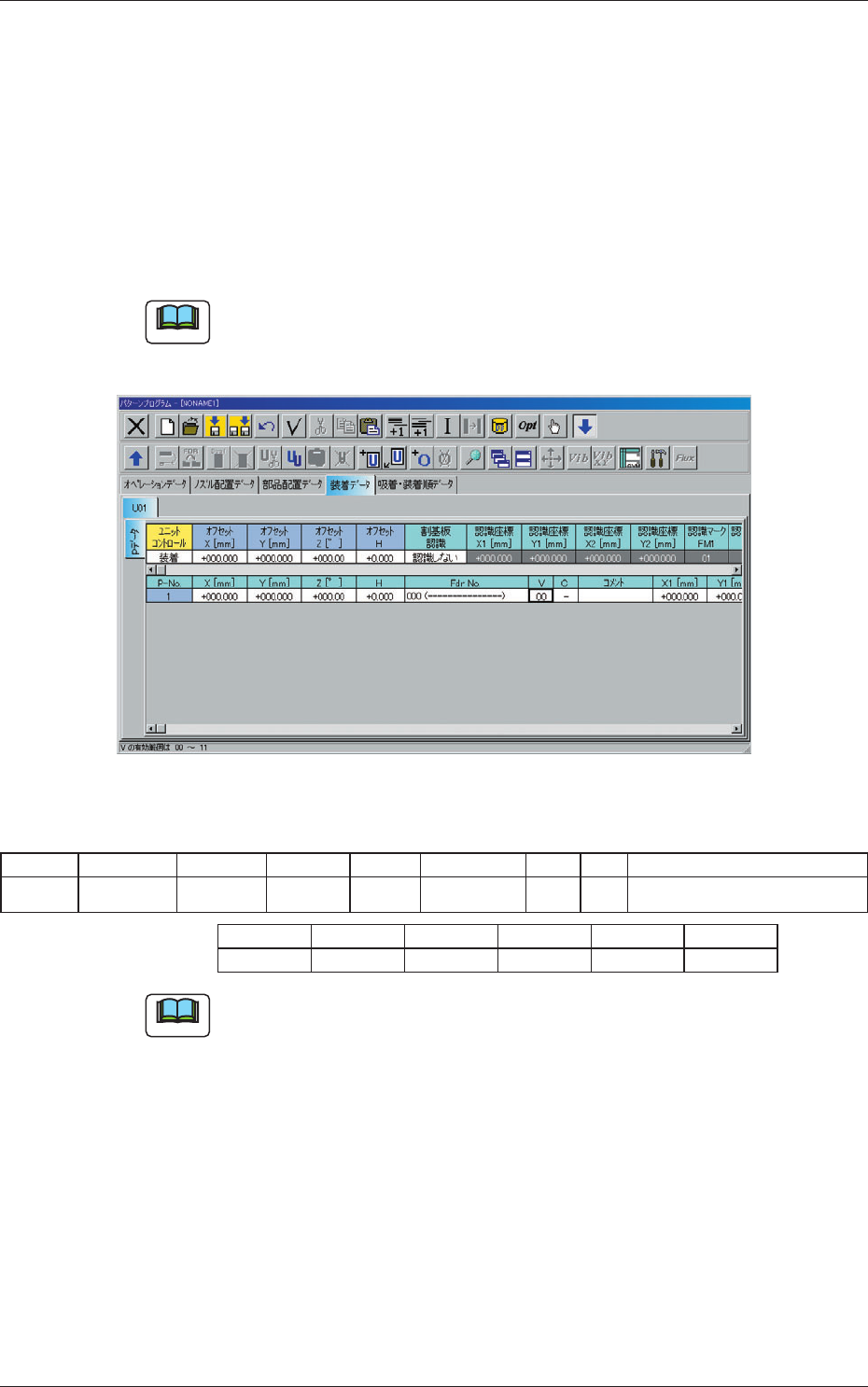
パターンプログラムを以下のように設定します。
個々認識 = “する” + V データ = “11”に設定します。
(X1 ~ X2、FM2 は無効データ)
11 : 個々認識 (2 点認識 ) を行います。
ノート
本装置を使用する場合の“V データ”は“11”を設定します。
Fig.24 “装着データ”タブシート
Table 2
P-No X [mm] Y[mm] Z[
°
] H Fdr No. V C コメント
2 +020.000 +025.000 +045.00 +1.200 703(TOP) 11 - トップ部品装着
X1 [mm] Y1 [mm] X2 [mm] Y2 [mm] FM1 FM2
+000.000 +000.000 +000.000 +000.000 02 02
ノート
基板認識カメラのフォーカス範囲に制約があるため、V データが
“11”の場合で、H < -1.5 mm または + 1.5 mm < H の場合は異常
になります。
6.1 パターンプログラム
6-7
Tg1356-ID-SO
0609-003
•
基板認識マークデータはマーク形状に“POP 円形ランド”を設定しま
す。
Fig.25 “基板認識マークデータ”タブシート
Table 3
マーク No マーク形状 D1[mm] D2[mm] D3[mm] 角度 認識領域 明暗 判定レベル 同軸 リング
2 POP 円形ランド 0.20 0.00 0.00 000.00 05.0 明 高 標準 標準
ノート
(a) “POP 円形ランド”の場合は、D1 が 0.13 mm 以上必要です。
(b) 通常の基板認識 ( 全体、割り、個々 ) に“POP 円形ランド”
が指定された場合や、個々認識が“する”、V データが“11”
の場合に“POP 円形ランド”以外が指定された場合は異常とな
ります。
(c) “POP 円形ランド”の場合、ボトム部品上の他のランドを誤認
識しないように、検査範囲を内部で自動設定するため、“認識
領域”データは無効となります。
6.1 パターンプログラム
6-8
Tg1356-ID-SO
0609-003
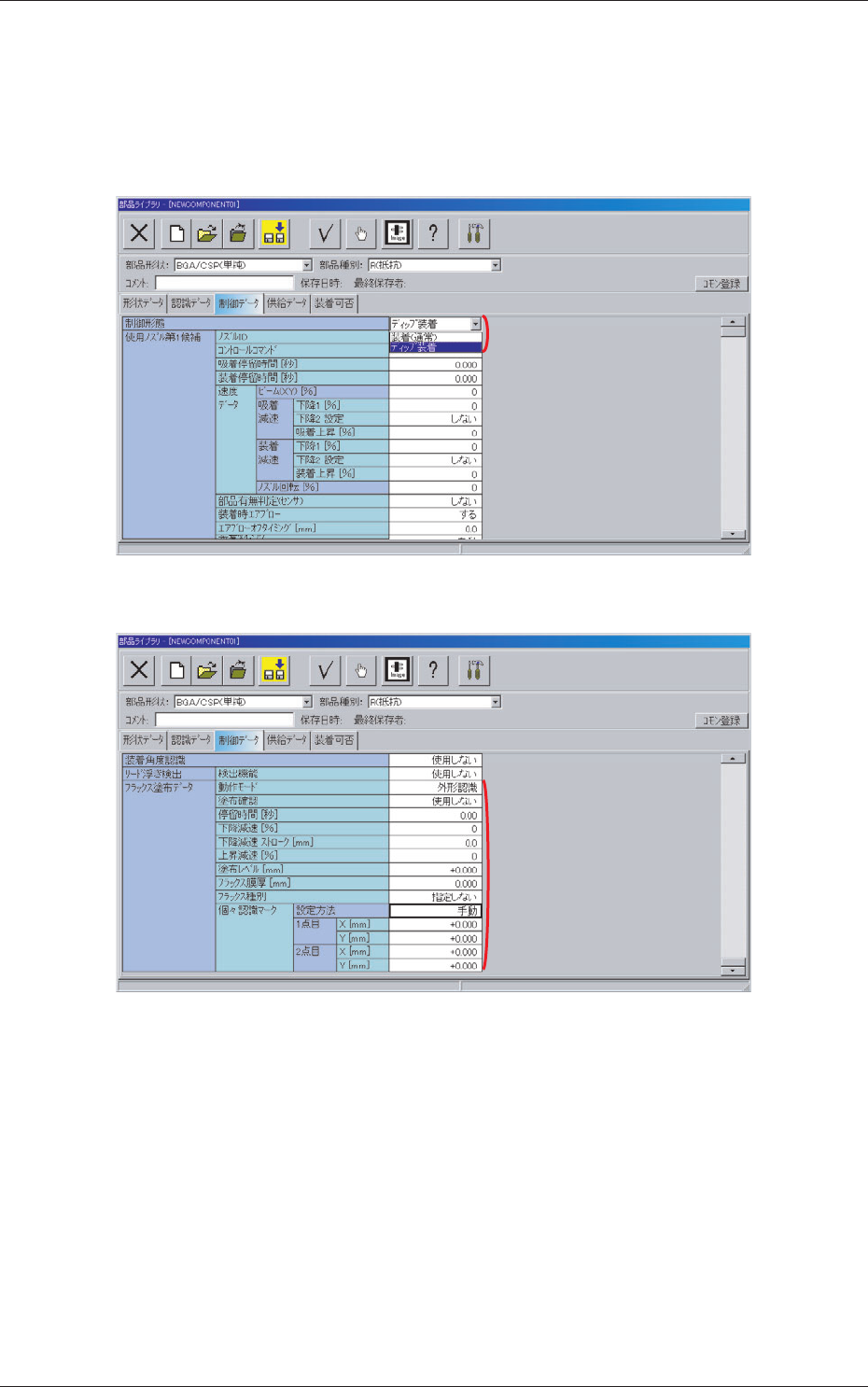
6.2 部品ライブラリ
フラックス塗布ユニットに対応した部品の設定をします。
“部品ライブラリ編集”画面の [ 制御データ ] タブを押すと、“制御デー
タ”タブシートが表示されます。
[1]
Fig.26
[2]
Fig.27
[1] 制御形態
部品ディップするかしないかを、以下から選択します。
装着(通常) :
従来通りの部品装着を行います。
ディップ装着 :部品ディップをします。
6.2 部品ライブラリ