TR7500_Series_Software_ch-v6-3-0.pdf - 第130页
Test Research Inc. 118 TR7500SeriesUserGuide – Software Model 1(Region Correlation) —此拼圖演算法是以數值運算方式,計算 FOV 間影像灰階差異最小處進行接和的運算。 Model 2(Pattern Search) —此拼圖演算法是以影像內容型態,以物件搜尋方 式進行找出兩影像間最相似的圖像進行拼圖。 Enable Setup RO…
Test Research Inc.
TR7500SeriesUserGuide–Software 117
Enable Decoded Fail Retry Count—解碼失敗時重複測試的次數,系統預設關
閉此選項,若解碼失敗時將會進行無限次數的重測,直至測試成功或使用者自
行輸入條碼字串。若啟動設定,則系統重測達設定次數即退板。
Enable Specific Characters Filtering(0~9; A, B~ Z; a, b~z) —條碼字串字元特
殊符號濾除功能,若條碼字串中存在特殊符號字元將判定為解碼錯誤,系統預
設啟動此功能。
Save Decode Fail Image—儲存解碼失敗影像。解碼失敗影像會被存在
Project 目錄下\\FailBarcodeImg\\資料夾中。系統預設關閉此功能。
Board out to Entrance When Decode Fail—解碼失敗時退板自進板口處,需
配合 PLC-2.25 或更新的版本才有支援此功能,系統預設關閉此功能。
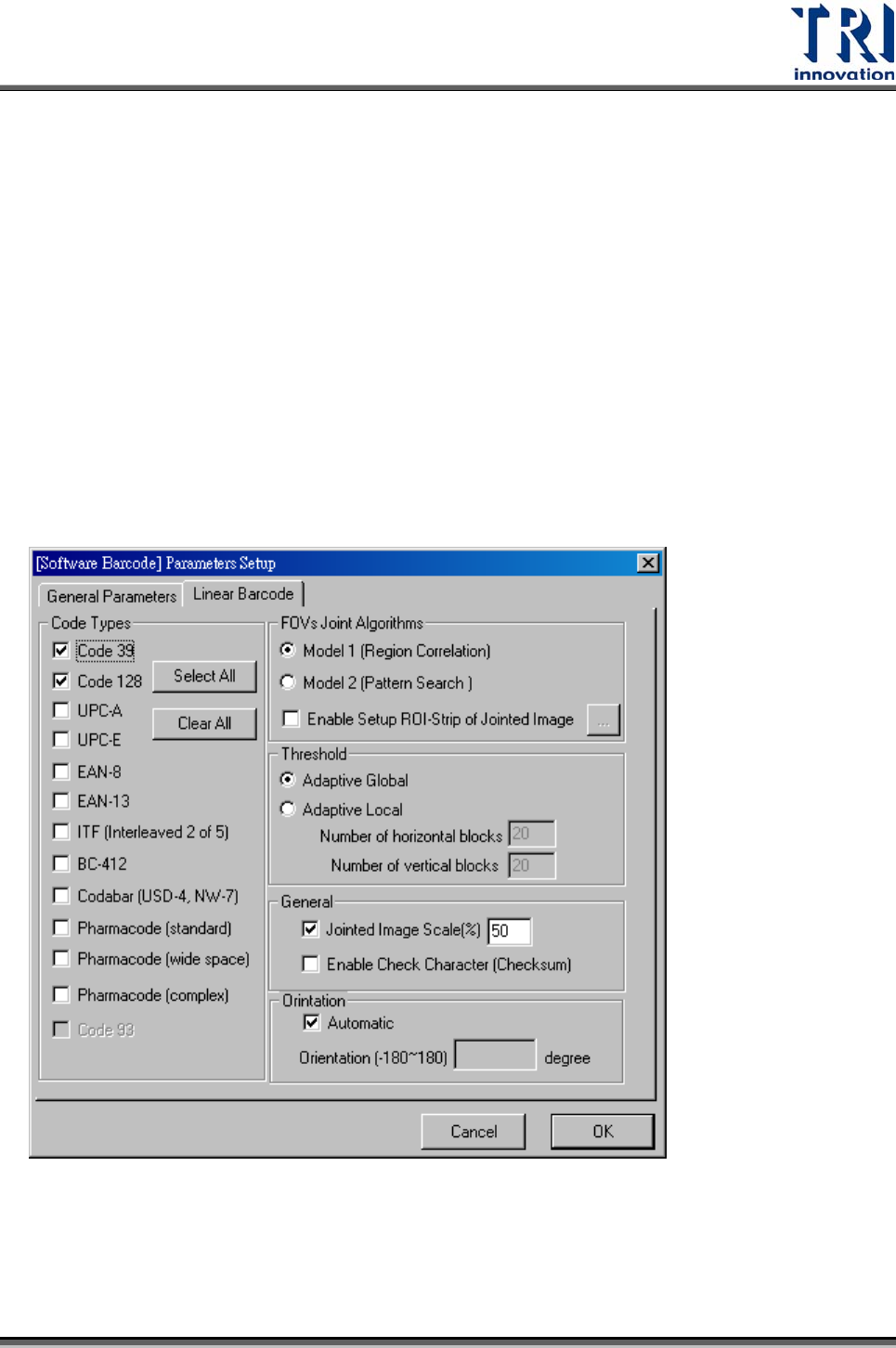
Linear Barcode—一維型態條碼參數
z Code Types—一維條碼的條碼型別。系統預設開啟 Code 39 與 Code128。若非
實際使用需要,請關閉不必要的條碼型別,設定過多的條碼型別會造成解碼錯誤
的機會並會增加解碼的時間。
z FOVs Joint Algorithms—拼圖演算法
Test Research Inc.
118 TR7500SeriesUserGuide–Software
Model 1(Region Correlation) —此拼圖演算法是以數值運算方式,計算 FOV
間影像灰階差異最小處進行接和的運算。
Model 2(Pattern Search) —此拼圖演算法是以影像內容型態,以物件搜尋方
式進行找出兩影像間最相似的圖像進行拼圖。
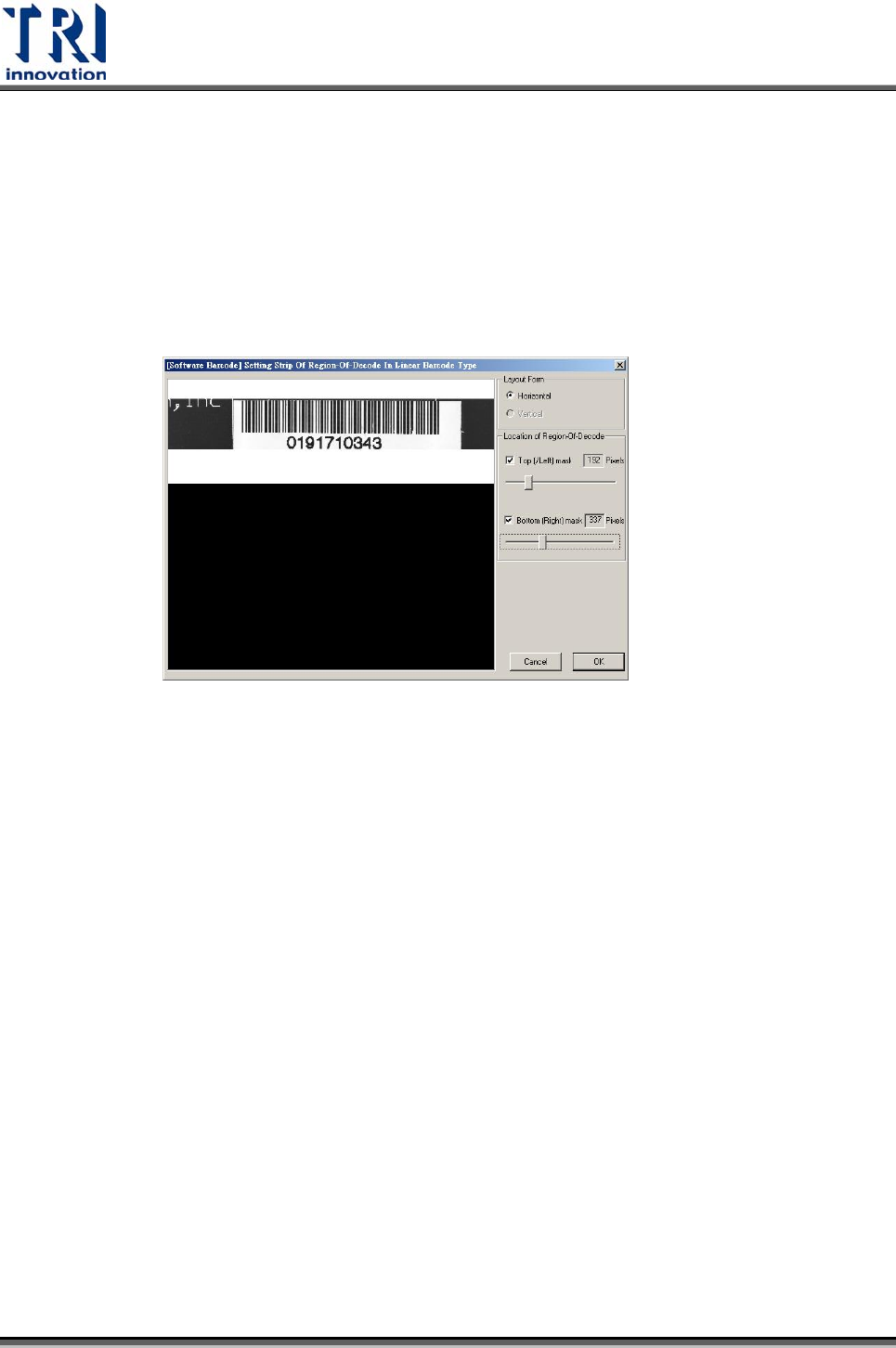
Enable Setup ROI-Strip of Jointed Image—設定拼圖影像條列屏蔽的功能。
啟動此功能可以屏蔽非條碼的部分,可避免不必要的錯誤並可以增加解碼的運
算速度,降低解碼所需的時間。影像條列屏蔽設定界面如下圖所示。
z Threshold—影像二值化演算法參數
Adaptive Global—全域的最適化(最佳化)閥值運算。系統預設值。
Adaptive Local—區域性的最適化(最佳化)閥值運算。
Number of horizontal blocks—區塊的水平方向大小(單位 Pixel)。
Number of vertical blocks—區塊的垂直方向大小(單位 Pixel)。
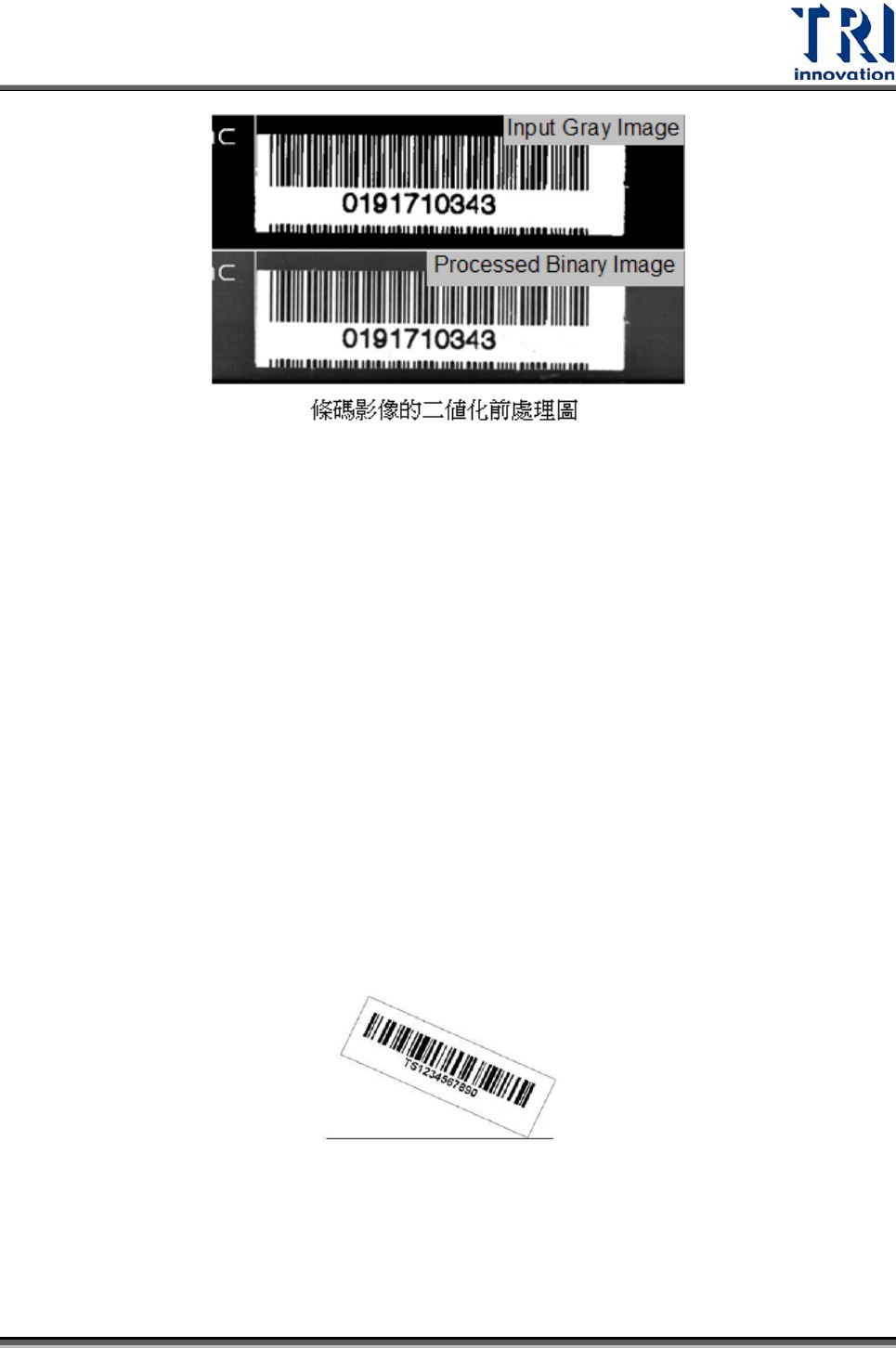
說明:
在此由條碼解碼的運算過程說明此參數意義。原始的條碼影像輸入後,需先
經由『二值化』的動作,將影像轉換成非黑即白的二值影像,如下圖所示,
之後再進行條碼的定位與條碼內文的解析。而此二值化的動作最重要的參數
即『閥值(Threshold)』。全域的最適化(Adaptive Global)閥值是整張影
像只會決定出一個閥值並依此閥值進行二值化動作,而區域性的最適化
(Adaptive Local)會依設定水平與垂直方向區塊大小進行區塊內個別區域的
二值化動作。
Test Research Inc.
TR7500SeriesUserGuide–Software 119
z General—一般性參數
Jointed Image Scale(%)—合併影像的縮放(30%~150%),影像由拼圖演算
法將 FOVs合併後,由於在某些運用狀況影像會過大,會造成解碼運算的負
擔,增加解碼運算時間。若啟動此參數可在進行解碼前將影像尺寸縮小,可降
低解碼運算負擔。但是,在某些運用中,縮的過小的影像會造成條碼本身影像
的資訊漏失,造成解碼失敗。設定的標準在於最細條碼的解析與對比度是否清
晰。對於高解析的條碼運用中,請關閉此參數。系統預設啟動此參數,預設
70% 。
Enable Check Characters (Checksum) —解析出的條碼內容值(字串內容)
的驗證檢測,依條碼的編碼原則,部分型態條碼(Barcode Types)擁有此編碼
原則,部分則否。此參數需視實際條碼編碼是否啟動驗證功能,以此對應來決
定解碼時是否開啟此功能。系統預設關閉此功能。
z Orintation—條碼在影像中的座落狀況呈現旋轉角度,如下圖所示。系統預設
『自動偵測』旋轉角度。
條碼於影像中座落旋轉角度
Data Matrix