TR7500_Series_Software_ch-v6-3-0.pdf - 第437页
Test Research Inc. TR7500SeriesUserGuide – Software 425 Step5. 完成後按 [ 下一步 ] 依一般程序進行其他 ATPG 步驟。 多連板配置類型大約分成以下三類,分別舉例說明如下 類型 1 : 1) 進行 6 號板的定位動作,可以得到板子 X 及 Y 方向的間距。 2) 用 [Shift] 選取區塊 2 的多連板,然後在區塊 2 中找一顆元件進行定位。可以得到 區…
Test Research Inc.
424 TR7500SeriesUserGuide–Software
Step5. 設定好新的多連板板數及角度配置後,依據一般程式製作流程重新製作以下
步驟。
3. 尋找進板旋轉角度(Rotate Angle)
4. 進行元件定位動作(Locate)
5. 設定 1 號板大小(Set Board 1 Size)
6. 重新製作定位點(Find Fiducial Mark)
7. 不進行 Merge,直接按[下一步(Next)]進入 FOV配置流程,此時系統會
將 1號板資訊複製到其他角度連板上。
8. 擷取 FOV影像,並選擇進行 Relocate 動作。
9. 完成 ATPG 步驟後,在主程式中選擇[工具(Utilities)/擷取電路板全圖
(Capture Panel Map)]。
4.11.4 多連板間距不同情況
當多連板配置間距不全相同時(例:多片多連板放在治具上),可使用本功能產生正確
的多連板資訊。
Step1. 設定多連板 MxN。(例:4x4)
Step2. 尋找進板角度。
Step3. 以第一區塊進行定位(Locate)動作,可得到區塊中多連板 X 方向及 Y方向間
距。
Step4. 以[Shift]鍵多選二、三區塊,並進行定位動作,可得到不同區塊的間距。
Test Research Inc.
TR7500SeriesUserGuide–Software 425
Step5. 完成後按[下一步]依一般程序進行其他 ATPG 步驟。
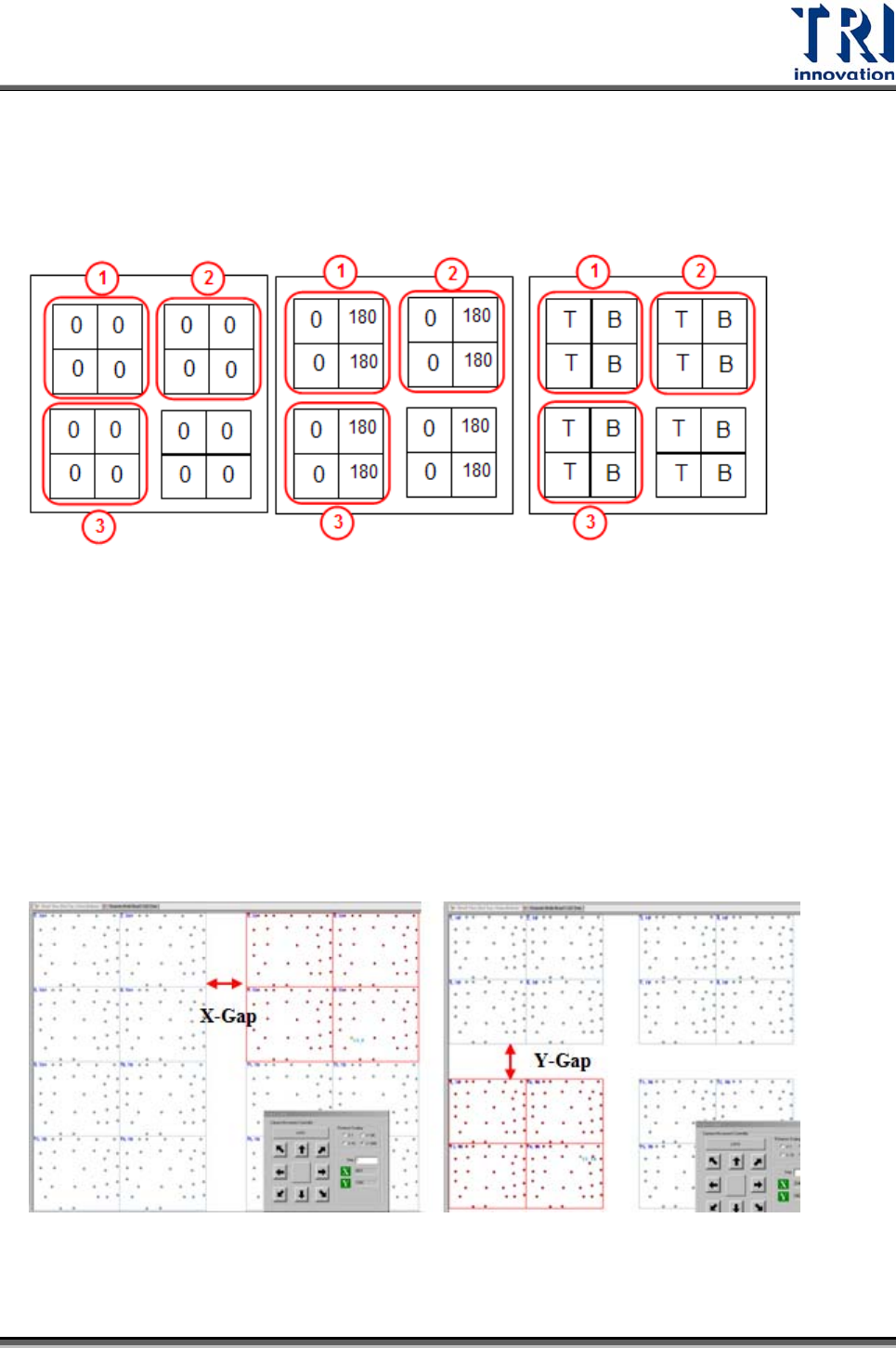
多連板配置類型大約分成以下三類,分別舉例說明如下
類型 1:
1) 進行 6號板的定位動作,可以得到板子 X 及 Y 方向的間距。
2) 用[Shift]選取區塊 2的多連板,然後在區塊 2 中找一顆元件進行定位。可以得到
區塊間的 X方向間距。
3) 用[Shift]選取區塊 3的多連板,然後在區塊 3 中找一顆元件進行定位。可以得到
區塊間的 Y方向間距。
類型 2及 3:
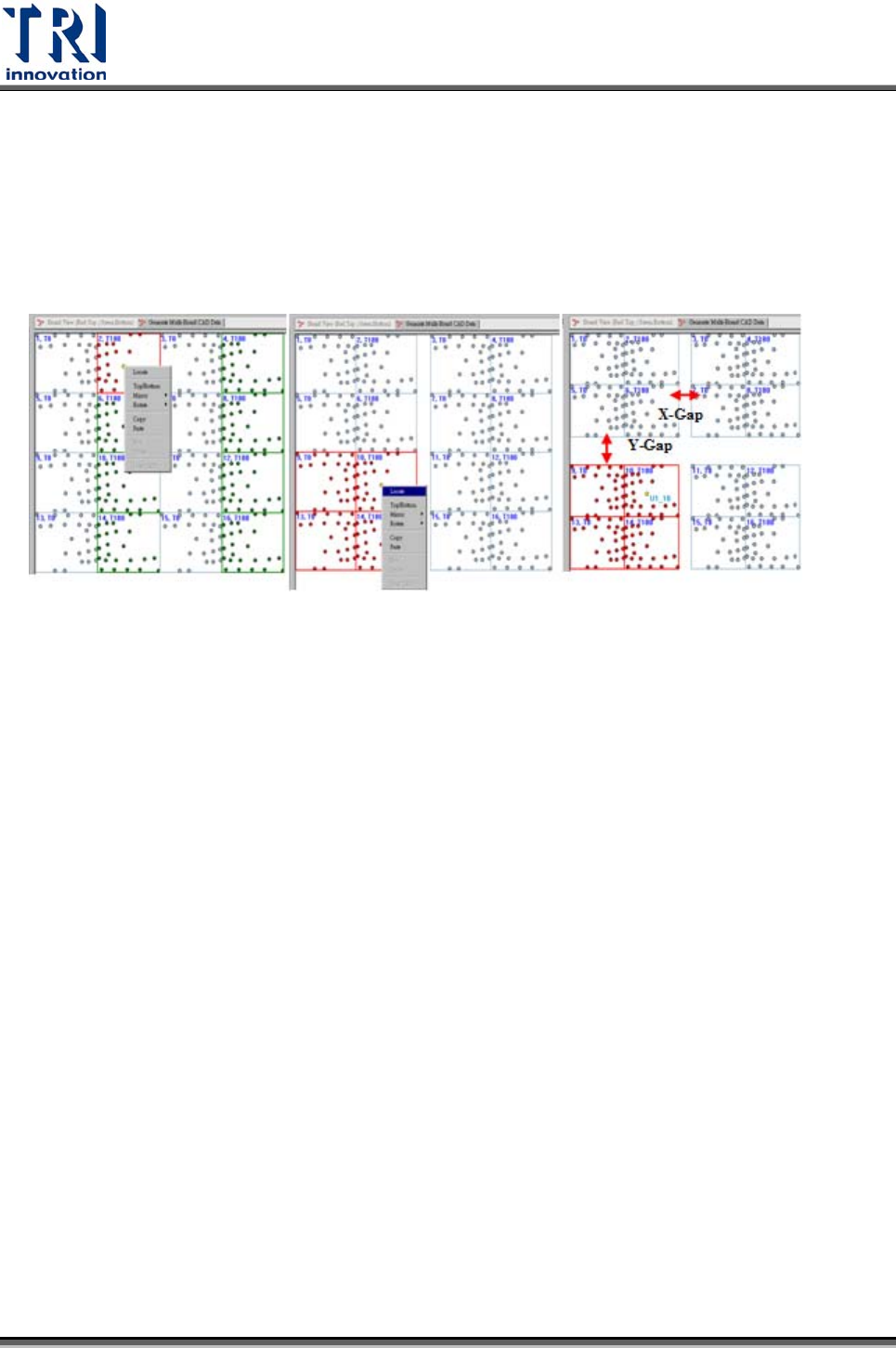
Test Research Inc.
426 TR7500SeriesUserGuide–Software
1) 先進行 2號板及 5 號板的定位,可以得到板子 X及 Y 方向的間距。
2) 用[Shift]選取區塊 2的多連板,然後在區塊 2 中找一顆元件進行定位。可以得到
區塊間的 X方向間距。
3) 用[Shift]選取區塊 3的多連板,然後在區塊 3 中找一顆元件進行定位。可以得到
區塊間的 Y方向間距。
4.11.5 以空板製作程式
利用空板製作程式時,程式可以自動[Relocate]和增加[Warp]框,可以節省有實板
後的程式製作時間。
製作方法
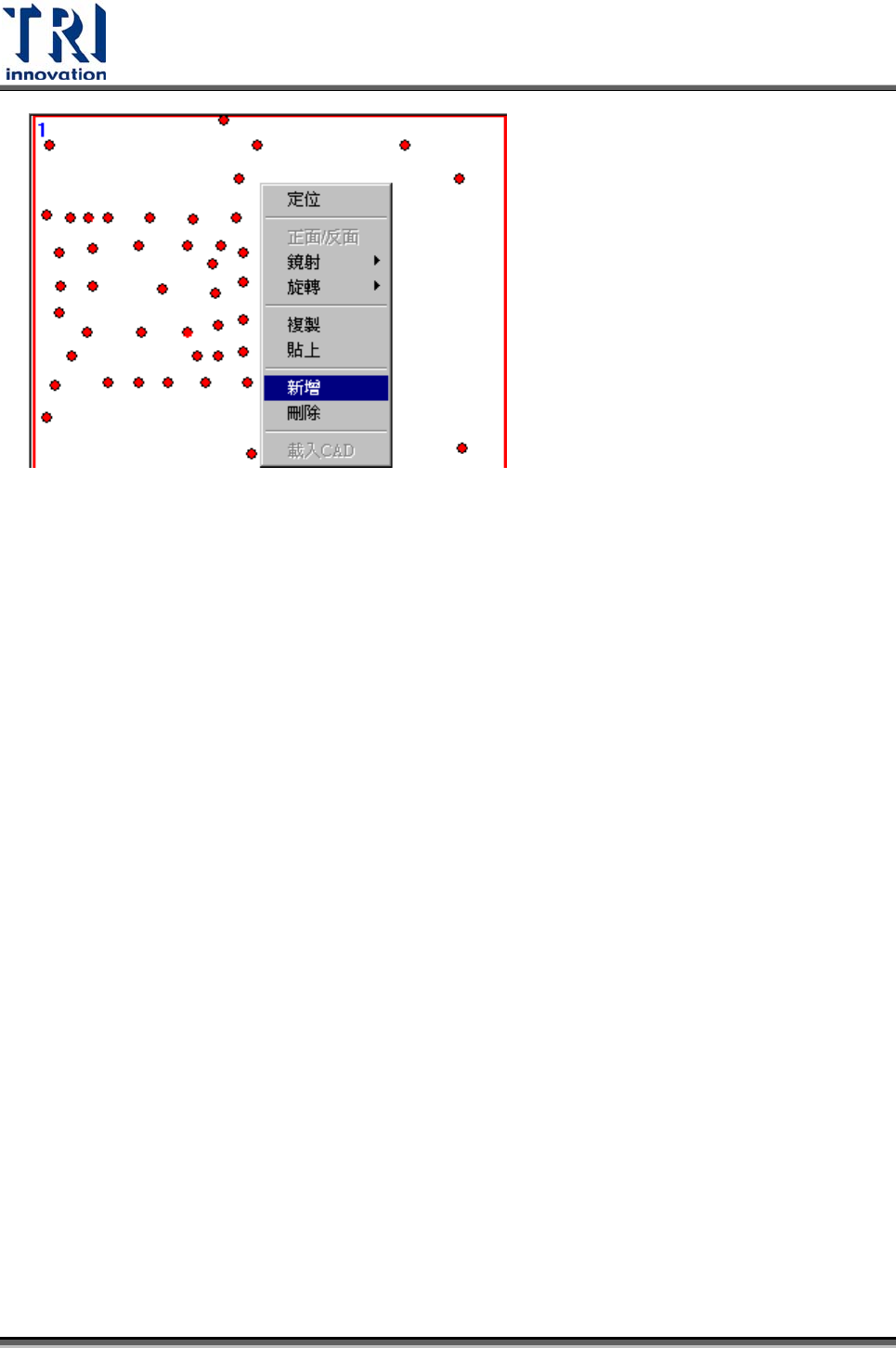
Step1. 載入一個已存在的 Library,利用[Add All]功能加入[Locate Window]框。
[Locate window]檢測原理與[Lead window]相同。