TR7500_Series_Software_ch-v6-3-0.pdf - 第58页
Test Research Inc. 46 TR7500SeriesUserGuide – Software 4) 若多連板間的距離過密,且有元件距離板邊過近,會造成 FOV 過密的現象,系 統必須降速才能夠維持多連板 FOV 的配置,此時會出現如下視窗。遇到此視窗 時,可選擇以下三個方法繼續進行程式製作。 A. 選擇 [OK] 表示使用系統建議的速度進行掃描及檢測。使用此選項會使用原本 的多連板 FOV 配置,但檢測速度將變…
Test Research Inc.
TR7500SeriesUserGuide–Software 45
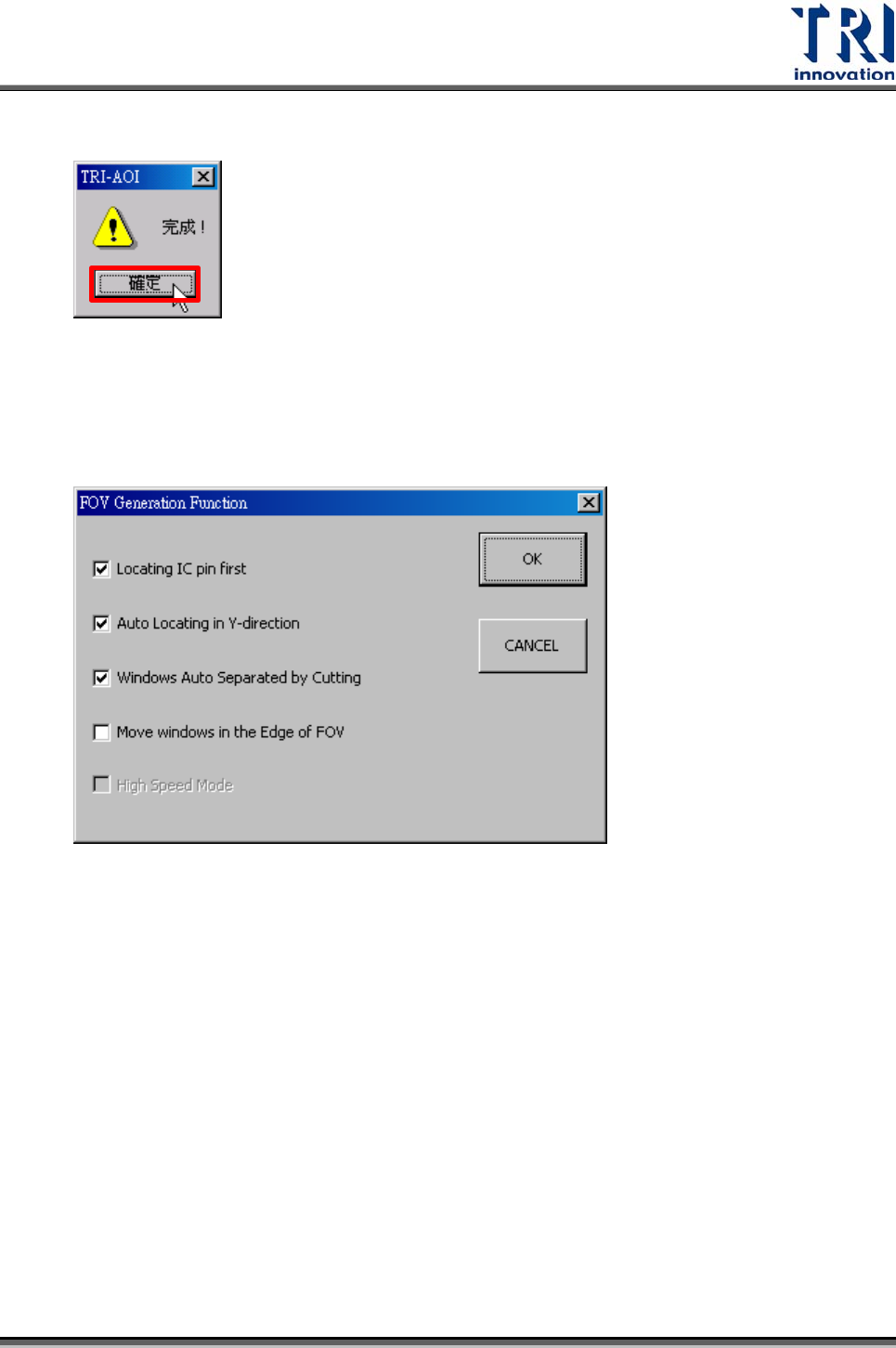
2) 此時攝影機開始移動,擷取大圖影像,完成後會出現[完成]視窗,請按[確定]。
3) 大圖抓取完成後,出現[FOV Generation Function]視窗,在此可選擇 FOV配置
時所希望的配置方式及檢測框的安排方式。在此視窗中有四個選項可以做選擇,
分別說明如下。
A. Locating IC pin first–勾選表示同一 IC 的腳的檢測框將會盡量可能安排在最
少的 FOV中。
B. Auto Locating in Y-direction–勾選的話表示在 FOV 配置完畢後,系統會再檢
視一次是否有被切割到的檢測框可以經由 Y 軸方向上下微調整排 FOV 位置而
使之不被切割到,如果可以的話將進行調整。
C. Windows auto separated by cutting–勾選此選項表示,如果無法經由微調使
檢測框不被切割到的話,那麼被切割到的 Missing框會自動被分割成兩個以
Missing 框並以邏輯[OR]接起來。
D. Move Windows in the Edge of FOV–此功能啟動後會將靠近邊界 30畫素以
內的檢測框嘗試做自動搬移的動作。目的是使檢測框不要落在 FOV的邊緣。
Test Research Inc.
46 TR7500SeriesUserGuide–Software
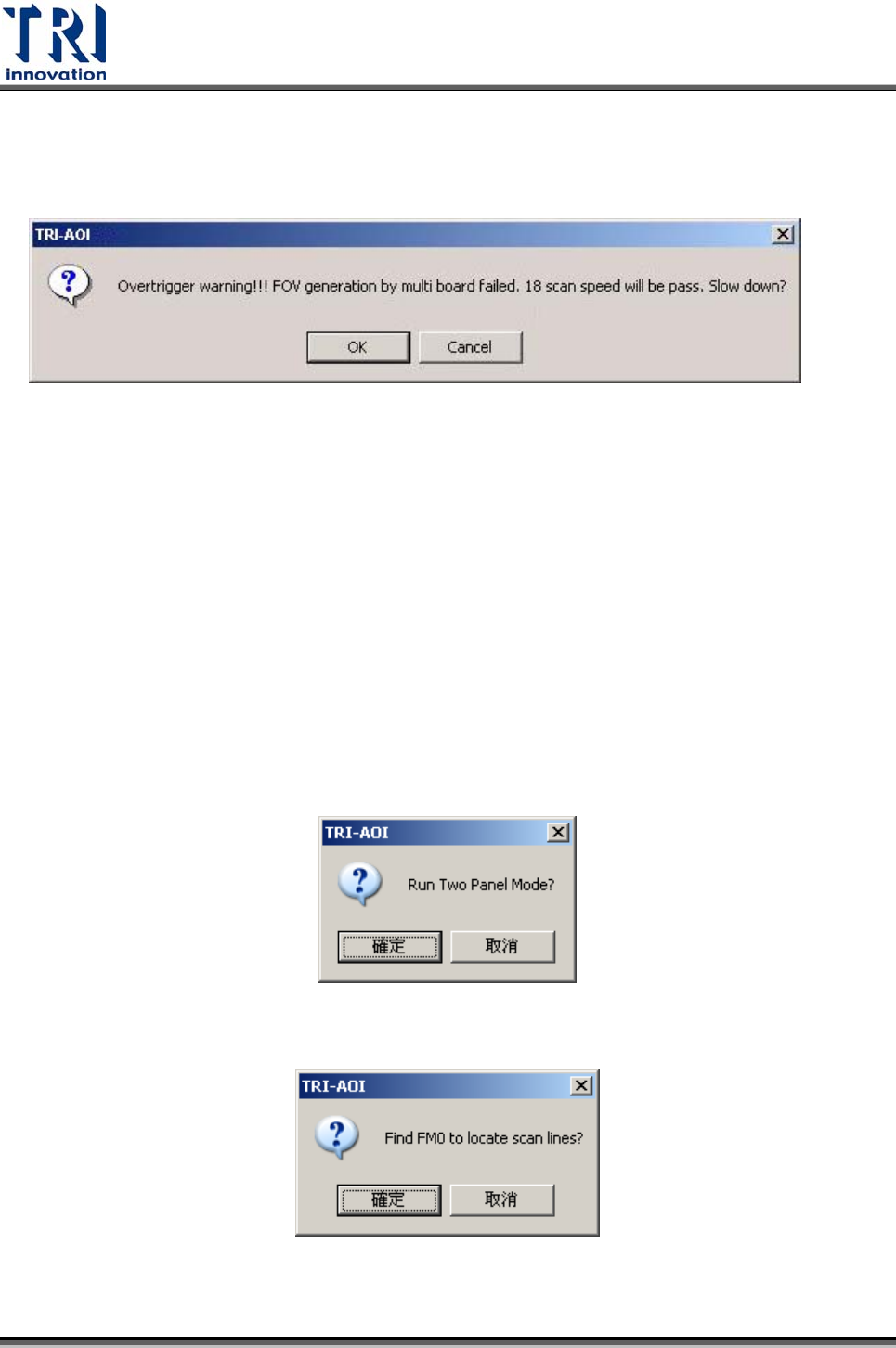
4) 若多連板間的距離過密,且有元件距離板邊過近,會造成 FOV過密的現象,系
統必須降速才能夠維持多連板 FOV的配置,此時會出現如下視窗。遇到此視窗
時,可選擇以下三個方法繼續進行程式製作。
A. 選擇[OK]表示使用系統建議的速度進行掃描及檢測。使用此選項會使用原本
的多連板 FOV配置,但檢測速度將變慢。
B. 選擇[Cancel]表示不降速,但 FOV的配置會自動以單板方式配置,即表示之
後製作程式時將無法使用[By Set]套用參數。
C. 重新編輯位於板邊元件的元件資料庫(Library),可試著將檢測框範圍縮小,嘗
試是否可以避免需要降速的情形發生。
5) Two Panel Mode。系統詢問是否需要使用[ Two Panel Mode],該功能為節省掃
標記點時間功能。檢測時第一片板子將只有將 FOV資料存下來不做運算,當第
二片板子開始掃 FOV時開始計算第一片板的檢測資料。該功能僅在多標記點時
才有作用。此功能需要花費較大的記憶體,僅適用於較小的電路板,若電路板太
大又開啟此功能,可能會造成記憶體不足,程式需要重新啟動的問題。
z 如使用 Two Panel Mode 功能,還會詢問是否要先掃標記點 0 去計算停板位置偏
差。
Test Research Inc.
TR7500SeriesUserGuide–Software 47
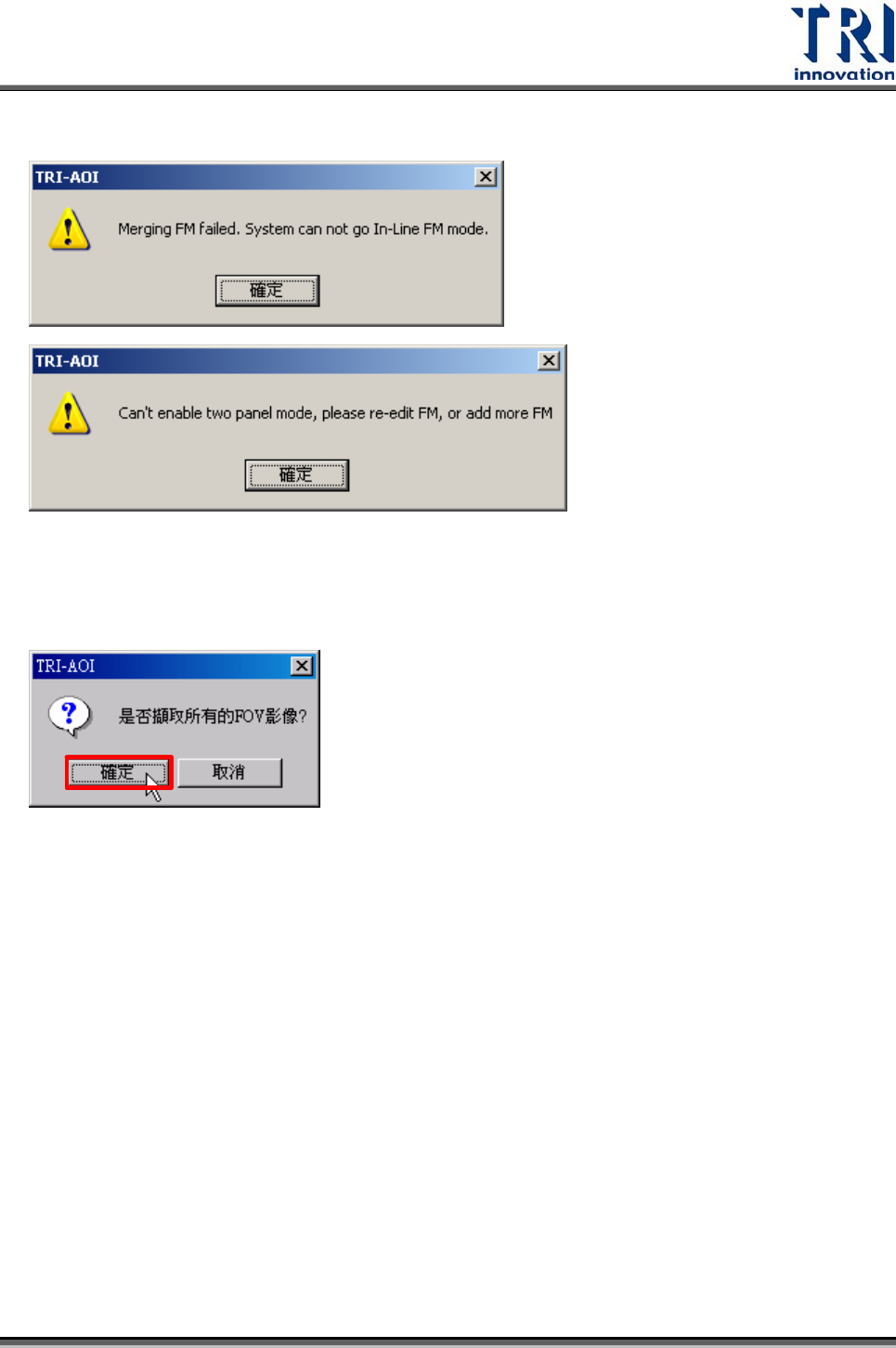
6) 如果未使用多標記點或標記點未能配進 FOV 會出現如下的警告訊息。
7) 系統詢問[是否擷取所有的 FOV影像],請按[確定]。若按[取消]表示不進行擷取
FOV 影像的動作。
在製作新程式第一次擷取 FOV 影像時,系統會自動進行動靜態影像補償的掃圖動
作。系統會先用正常的速度掃一次圖,再使用慢速度掃第二次圖,再計算完需補償
的取像位置後,再以正常速度掃第三次圖。
若要取消此補償機制,在登錄檔中將參數[FovPosCalibration]的值修改為 0即可。
若要增加此功能,則需在登錄檔中新增一參數[FovPosCalibration] (DWORD) 且將
值設定為 1即可。登錄檔中另一參數[FovPosCalibrationStaticSpeed] 其值代表為第
二次慢速掃圖的速度。