00196044-05 - sg x und x4i fse_en.pdf - 第323页
Collect, Pick and Place Head (CPP) Working Position on Placement Head Pickup and Placement Cycle for CPP S tudent Guide (FSE) SIPL ACE X Series and X4I Edition 01/2009 EN Collect, Pick and Place Head (CPP) 323 8.4 Pickup…
Collect, Pick and Place Head (CPP)
Reference run CPP head Measuring Z Axis Position for Component Recognition by the Component Sensor
Student Guide (FSE) SIPLACE X Series and X4I
Collect, Pick and Place Head (CPP) Edition 01/2009 EN
322
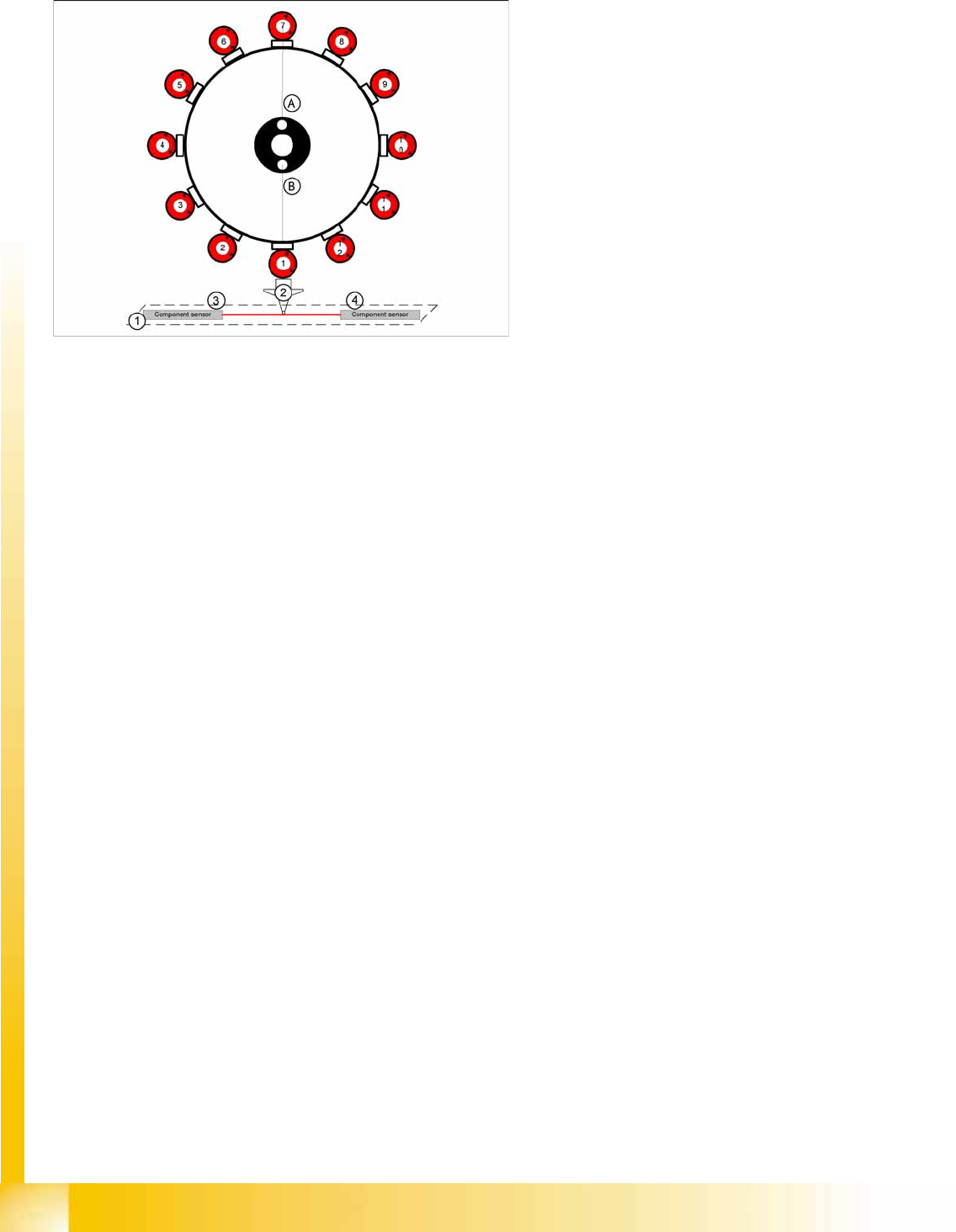
8.3.6 Measuring Z Axis Position for Component Recognition by the Component Sensor
While the Z axis moves downwards, the nozzle interrupts the laser beam of the component sensor. The
axis position is saved and later used for the calculation of the component height and component
presence. At the upwards movement of the Z axis, the laser beam is no longer interrupted and the axis
position is saved again. The component presence can be determined during placement by the
programmed component height (SIPLACE Pro) and the nozzle length, calculated during the height
reference run by the Z axis position counter.
8-7: Nozzle length reference values for component recognition with
component sensor
Legend
1. Component sensor
2. Nozzle
3. IR receiver
4. IR transmitter
During the height reference run, the component
sensor measures the Z axis position for each
segment, to detect the presence/absence of
components in the pickup and placement position.
Collect, Pick and Place Head (CPP)
Working Position on Placement Head Pickup and Placement Cycle for CPP
Student Guide (FSE) SIPLACE X Series and X4I
Edition 01/2009 EN Collect, Pick and Place Head (CPP)
323
8.4 Pickup and Placement Cycle for CPP
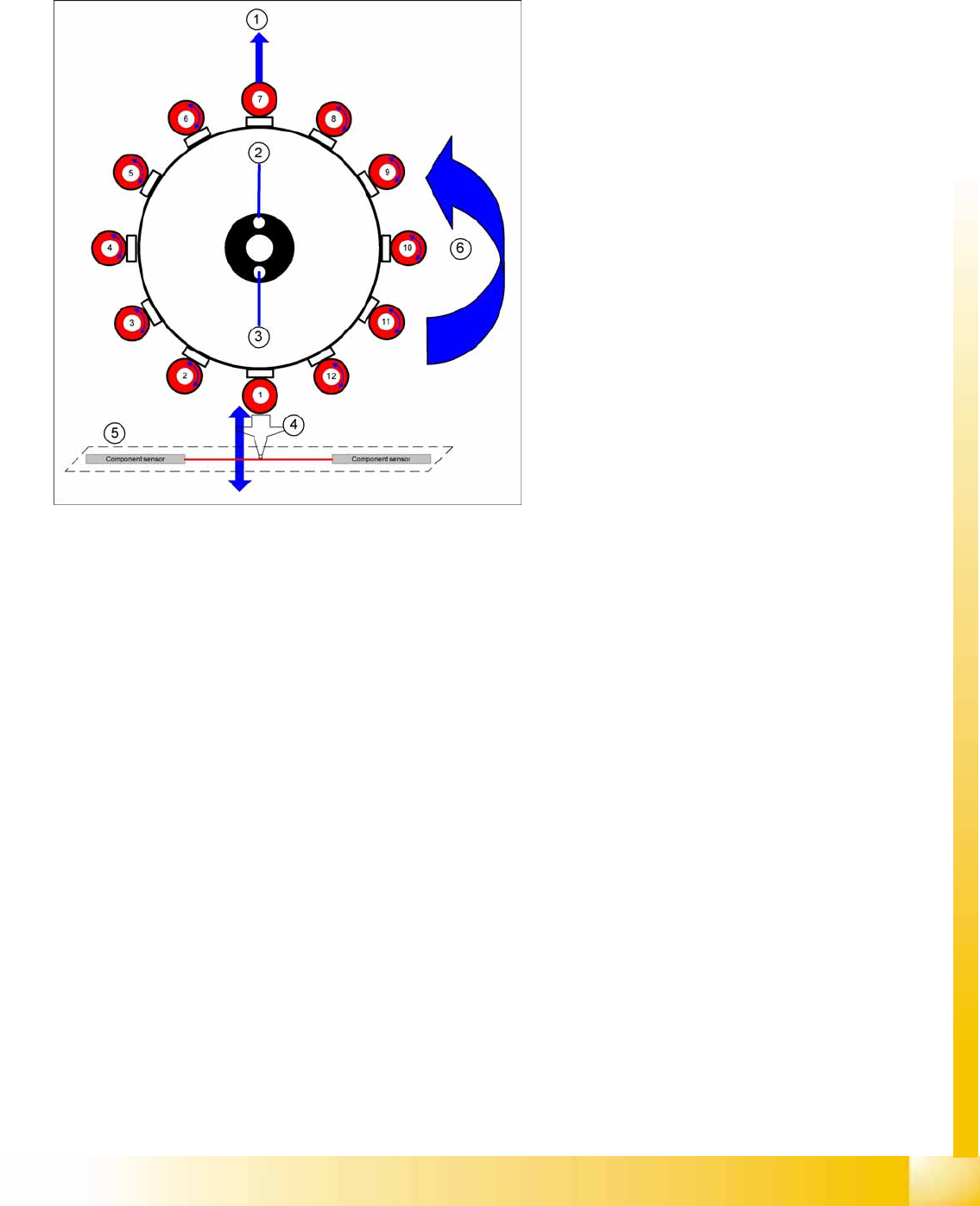
8.4.1 Working Position on Placement Head
8.4.2 Placement Modes
The CPP head functions according to the Collect&Place principle, whereby additional operating modes
(Pick&Place and mixed mode) are possible to help extend the component spectrum.
The placement mode is, on the one hand, dependent on the configured camera and, on the other hand,
on the component dimensions and their tolerances in SIPLACE Pro.
The respective placement mode is determined by the Optimizer in SIPLACE Pro band can not be
influenced.
C&P mode: The Collect-and-Place mode is the same mode for the C&P6/12 and C&P20A placement
heads. Components are picked up (the quantity depends on the number of segments), optically centered
with the component camera and then placed.
P&P mode: The Pick-and-Place mode is the mode used for IC and TwinHead. It is therefore also used
for the CPP head, which picks up components with either one or more segments, according to the
component size. Due to their size, it is not possible to rotate these components with the head and they
need to be optically centered via the stationary camera and then placed.
Mixed mode: Mixed mode differentiates between the following two cases:
The components are small enough to be rotated by the head.
The components are too large. Just 2 or 3 components are picked up, centered by the stationary
camera and then placed.
8-8: Working Position on Placement Head
Legend
1. Optical centering (component camera)
2. Vacuum measurement hold circuit
3. Vacuum measurement placement circuit
4. Pickup/placement station and reject position
5. Position of component sensor
6. Direction of processing in C&P mode
Collect, Pick and Place Head (CPP)
Pickup and Placement Cycle for CPP Placement Modes
Student Guide (FSE) SIPLACE X Series and X4I
Collect, Pick and Place Head (CPP) Edition 01/2009 EN
324
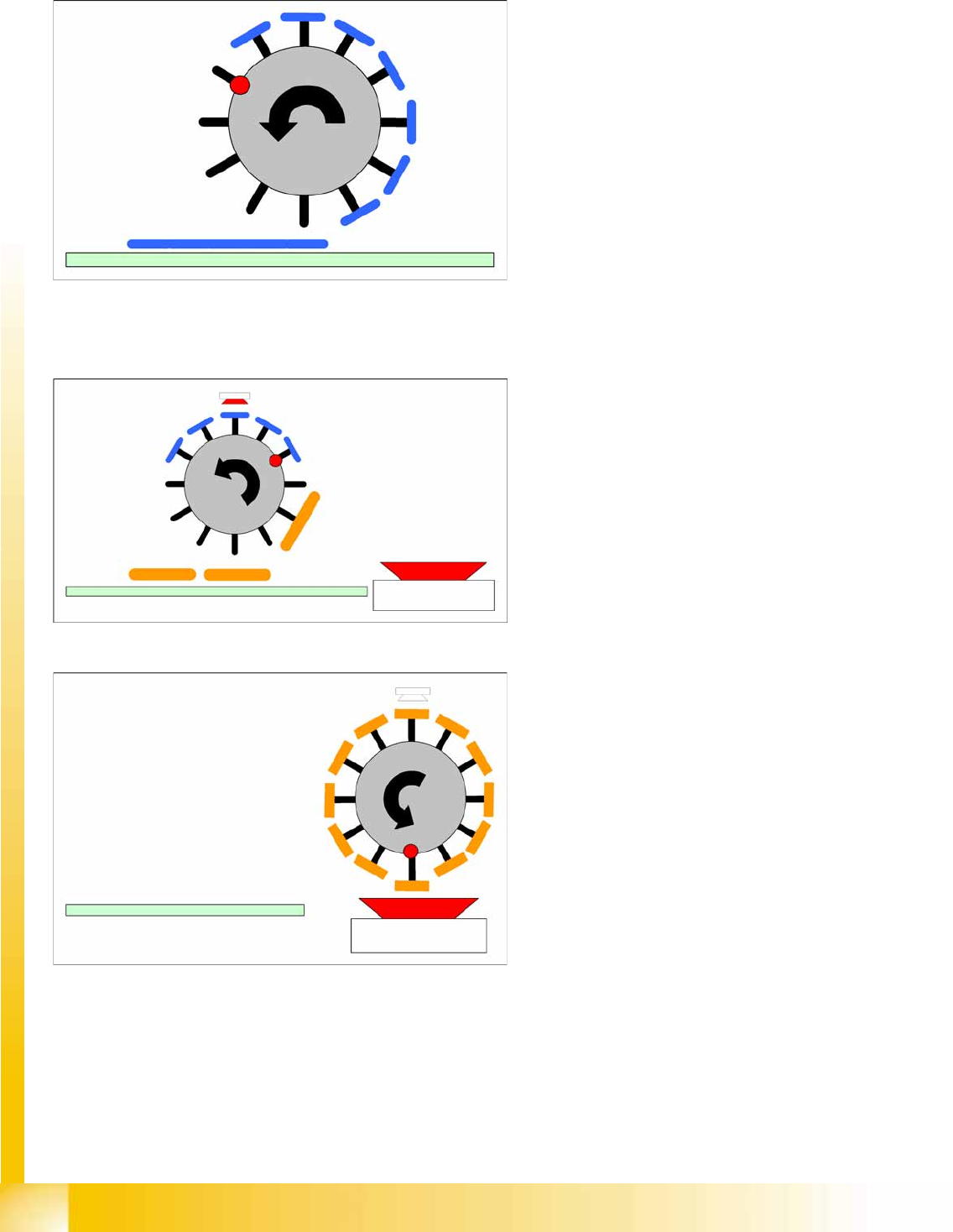
8.4.2.1 Collect&Place Mode
8.4.2.2 Mixed Mode
Component spectrum:
01005 to 27x27 mm
8.5 mm high
Speed:
20,000 to 24,000 CO/h
Accuracy:
+/- 50 µm (4 sigma)
0.3° (4 sigma)
Mixed mode 1
Component spectrum:
01005 to 32x32 mm
11.5 mm height
Accuracy:
+/- 45 μm (4 sigma) with stationary camera
Mixed mode 2
Component spectrum: 01005-32x32mm,
11.5 mm height
Accuracy:
+/- 45 μm (4 sigma) with stationary camera