00196044-05 - sg x und x4i fse_en.pdf - 第354页
Twin Head Reference Run Vacuum check S tudent Guide (FSE) SI PL ACE X Series and X4I T win Head Edition 01/2009 EN 354 9.2.3 V acuum check After the CAN bus proces sor for the va cuum/air bl ast distributor has boo ted…
Twin Head
Reference run at Z axis Reference Run
Student Guide (FSE) SIPLACE X Series and X4I
Edition 01/2009 EN Twin Head
353
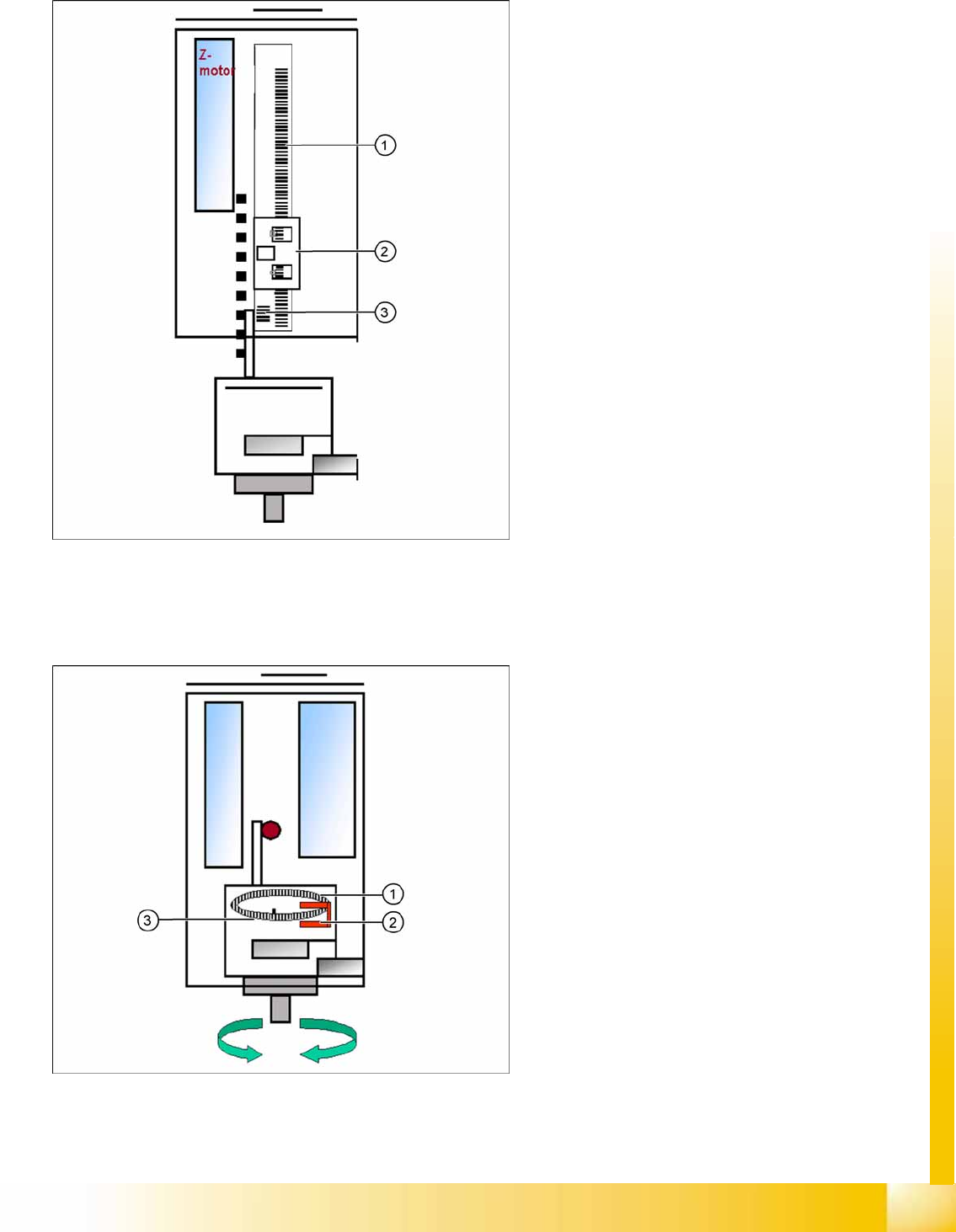
9.2.1 Reference run at Z axis
9.2.2 Reference run at D- axis
9-6: Reference run Z axis
Legend
1. Incremental scale mounted on moveable part
of the Z Axis
2. Fixed Incremental encoder
3. Zero puls on the incrementale scale (only one
for Z axis)
Z Axis search for the commutation point of the
linear motors (in a special mode because of
the danger of a movement downwards). (A 3
phase motor continues to run at the correct
time and in the correct sequence, when the
current is switched from 1 phase to the next
one.)
Then the Z Axis move upwards to the Zero
pulse and load the zero point correction.
The zero point correction, max. and min. travel
range, are determined when you calibrate the
head height.
9-7: Reference run D-axis
Legend
1. Incremental glass scale D-axis
2. Incremental encoder
3. Zero pulse on the incremental glass scale
Then the D-axis (turning axis) executes the
reference run.
The D-axis runs to the zero pulse of the D- axis
encoder. The zero point correction value will be
loaded. The D-axis moves to the reference
position, in accordance with the prefix shown
before the value.
Reference run completed! This is followed by
the gantry reference run (see Section Gantry).
Twin Head
Reference Run Vacuum check
Student Guide (FSE) SIPLACE X Series and X4I
Twin Head Edition 01/2009 EN
354
9.2.3 Vacuum check
After the CAN bus processor for the vacuum/air blast distributor has booted, the vacuum/air blast
distributor is initialized. This means that vacuum/air blast generator is adjusted to ensure that neither
vacuum or air blast is generated at the nozzle.
The Gantry axes move the Twin-head to the reject position.
Over the reject box the Vacuum-, air blast generator switch to air blast to reject components and
check the air blast.
The vacuum/air blast generator now switches over to vacuum and the open vacuum at both
segments (X and D3 machine, D1: one Twin segment) is measured*.
After measurement, the pressure is adjusted back to 0 bar.
The vacuum reference run has now been completed for the Twin head.
* The closed vacuum value for the Twin segments relates to the calibration value which was determined
in SITEST.
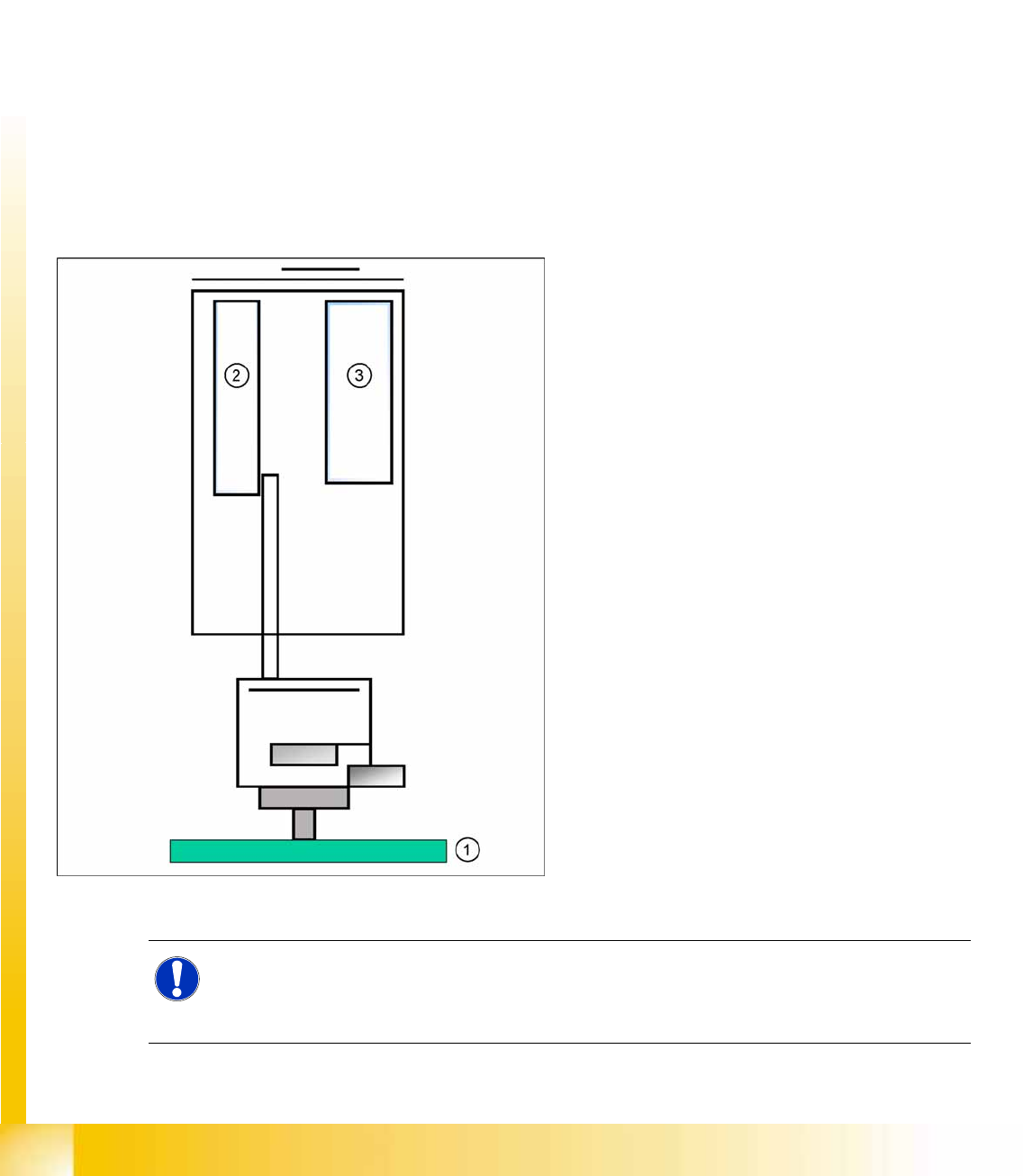
9.2.4 Height Reference Run
9-8: Measure nozzle height
With this function we check the correct nozzle type
which is programmed. The nozzle length is taken
to calculate the pick up and placement height for
the following placements.
Legend
1. Top of fixed conveyor side
2. Z motor
3. Vacuum - air blast distribution
X The gantry moves the placement heads above
the fixed conveyor side.
X The Z axis positions module 2 (X/D3 machine)
downwards.
X The travel range of the Z axis is taken to
calculate the Twin head height in relation to
the nozzle type.
X Now the same happen with module 1.
X The maximum length tolerance is 0,4 mm: If
the length difference is too high an error
message is displayed.
NOTE:
Both modules are measured at the same position of the PCB conveyor!
This Twin head reference run is performed parallel to the C&P head reference run in the other
placement area.
Twin Head
General Twin Head Pickup and Place Cycle
Student Guide (FSE) SIPLACE X Series and X4I
Edition 01/2009 EN Twin Head
355
9.3 Twin Head Pickup and Place Cycle
9.3.1 General
9.3.2 Twin Head Placement Principle
During the PCB transport time, the gantry waits at the theoretical fiducial position, to perform board
centering (and inkspot recognition) after PCB clamping. With the " Whispering down the machine"
option, gantry 3 only evaluates 2 fiducials.
Than the Twin-head start to collect one component with module 1 and one component with module 2.
These components are then centered with the IC camera (FC camera) and are placed.
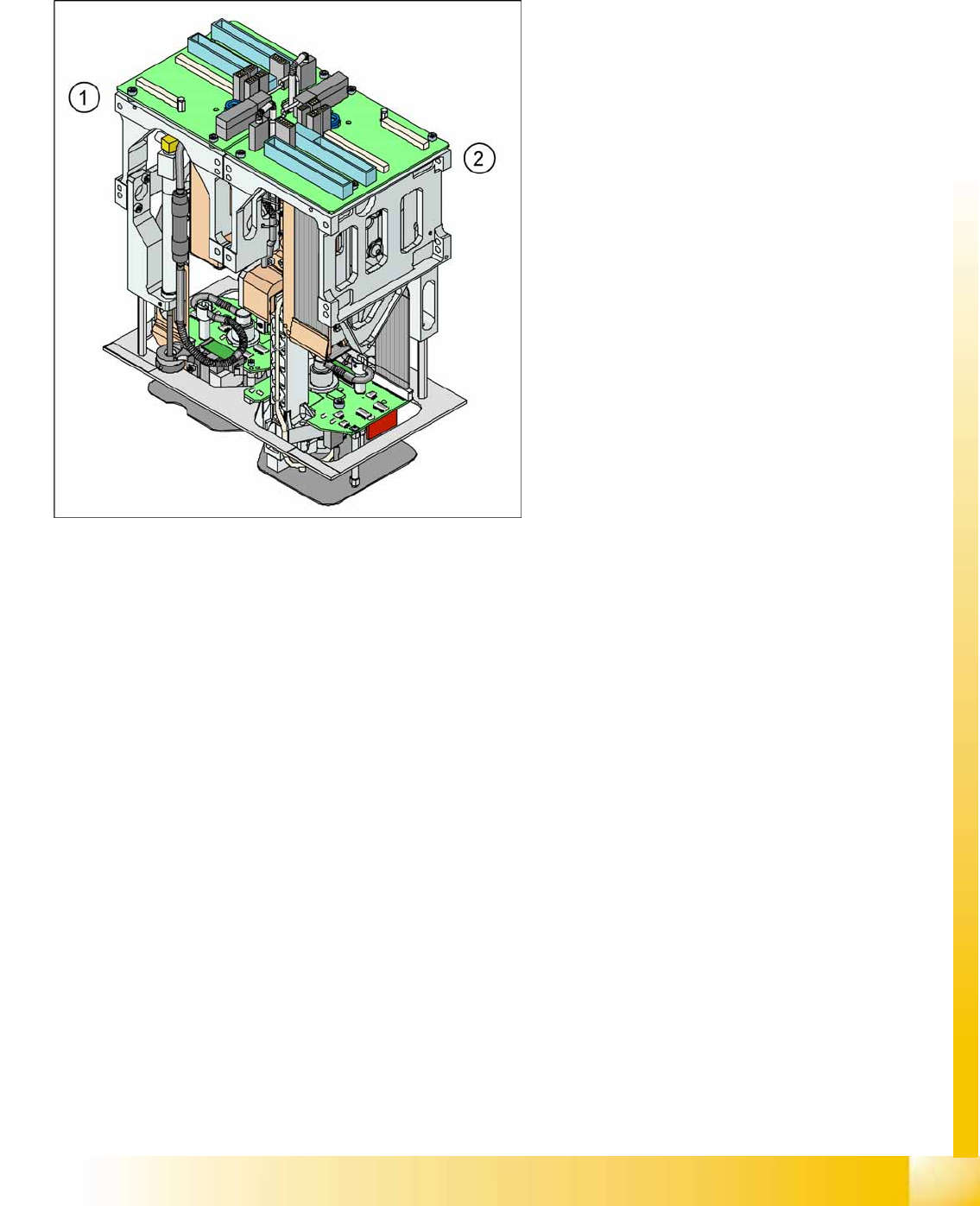
9-9: View of Twin head
The TWIN Head module 2 (2) has been mounted
at an angle of 180 degrees to module 1 (1).
The distance between the nozzles is
approximately 71 mm in X - direction.
The maximum component height is 25 mm.
The contact force at placement can be
programmed between 0.5 N and 15 N (up to
30 N for a highforce Twin head).
The rotational accuracy is 0.07 degrees,
4 sigma/X and Y axes 35 µm 4 sigma.
The placement of special shaped components
has been improved:
– Components up to 200x125mm, weight of
100g
– Placement performance: 3700 cph for
large components