JAKA 服务手册-zh-V3.1_20231017_20240108182934A001 - 第189页
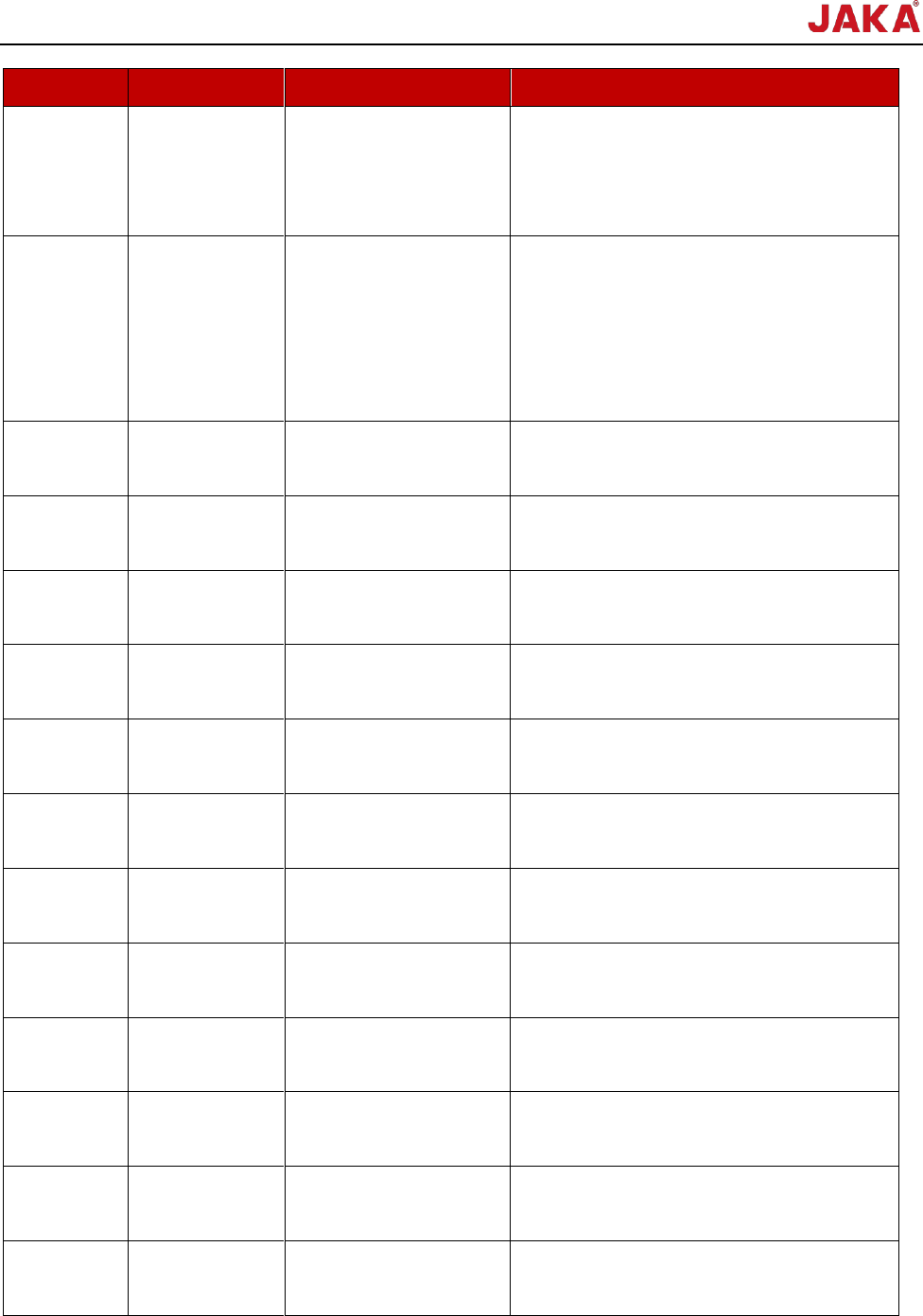
文档版本: 3.1 189 / 201 节卡服务手册 错误代码 描述 原因 措施 0x107388 关节一编码器磁 信号异常 编码器信号幅值错误、 磁模式错误、信号丢 失、信号异常。 1. 请查看是否 为固定关节报错,请联 系节卡 技术服务人员检查关节 或编码器是否 异常。 2. 请查看机器 人工作环境或本体是否 有外部 信号或磁信号干扰。 0x1 17388 关节二编码器磁 信号异常 编码器信号幅值错误、 磁模式错误、信号丢 失、信号…
文档版本:3.1 188 / 201 节卡服务手册
错误代码
描述
原因
措施
是否异常。
0x157182
关节六高频注入
反向
电机实际磁极方向与脉
冲注入计算不一致,出
现控制异常。
1. 请联系节卡技术服务人员查看电机参数是
否正确。
2. 请检查电机相序接线是否正确。
3. 请联系节卡技术服务人员检查关节驱动板
是否异常。
0x107580
关节一动力学超
限
转矩前馈超出伺服阈
值。
联系节卡技术服务人员处理。
0x117580
关节二动力学超
限
转矩前馈超出伺服阈
值。
联系节卡技术服务人员处理。
0x127580
关节三动力学超
限
转矩前馈超出伺服阈
值。
联系节卡技术服务人员处理。
0x137580
关节四动力学超
限
转矩前馈超出伺服阈
值。
联系节卡技术服务人员处理。
0x147580
关节五动力学超
限
转矩前馈超出伺服阈
值。
联系节卡技术服务人员处理。
0x157580
关节六动力学超
限
转矩前馈超出伺服阈
值。
联系节卡技术服务人员处理。
0x103211
关节一驱动板动
力电源故障
硬件驱动板损坏。
联系节卡技术服务人员处理。
0x113211
关节二驱动板动
力电源故障
硬件驱动板损坏。
联系节卡技术服务人员处理。
0x123211
关节三驱动板动
力电源故障
硬件驱动板损坏。
联系节卡技术服务人员处理。
0x133211
关节四驱动板动
力电源故障
硬件驱动板损坏。
联系节卡技术服务人员处理。
0x143211
关节五驱动板动
力电源故障
硬件驱动板损坏。
联系节卡技术服务人员处理。
0x153211
关节六驱动板动
力电源故障
硬件驱动板损坏。
联系节卡技术服务人员处理。
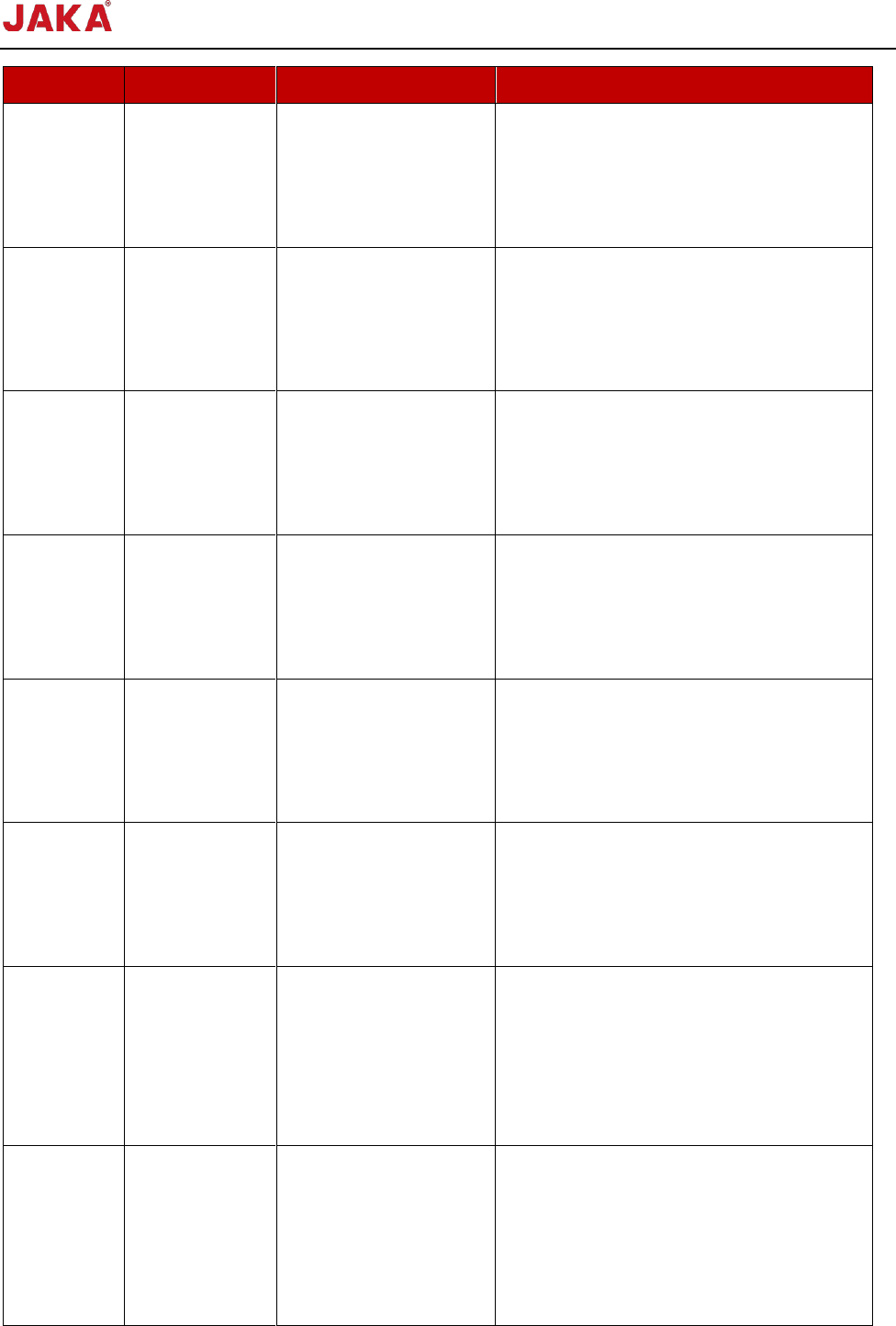
文档版本:3.1 189 / 201 节卡服务手册
错误代码
描述
原因
措施
0x107388
关节一编码器磁
信号异常
编码器信号幅值错误、
磁模式错误、信号丢
失、信号异常。
1. 请查看是否为固定关节报错,请联系节卡
技术服务人员检查关节或编码器是否异常。
2. 请查看机器人工作环境或本体是否有外部
信号或磁信号干扰。
0x117388
关节二编码器磁
信号异常
编码器信号幅值错误、
磁模式错误、信号丢
失、信号异常。
1. 请查看是否为固定关节报错,请联系节卡
技术服务人员检查关节或编码器是否异常。
2. 请查看机器人工作环境或本体是否有外部
信号或磁信号干扰。
0x127388
关节三编码器磁
信号异常
编码器信号幅值错误、
磁模式错误、信号丢
失、信号异常。
1. 请查看是否为固定关节报错,请联系节卡
技术服务人员检查关节或编码器是否异常。
2. 请查看机器人工作环境或本体是否有外部
信号或磁信号干扰。
0x137388
关节四编码器磁
信号异常
编码器信号幅值错误、
磁模式错误、信号丢
失、信号异常。
1. 请查看是否为固定关节报错,请联系节卡
技术服务人员检查关节或编码器是否异常。
2. 请查看机器人工作环境或本体是否有外部
信号或磁信号干扰。
0x147388
关节五编码器磁
信号异常
编码器信号幅值错误、
磁模式错误、信号丢
失、信号异常。
1. 请查看是否为固定关节报错,请联系节卡
技术服务人员检查关节或编码器是否异常。
2. 请查看机器人工作环境或本体是否有外部
信号或磁信号干扰。
0x157388
关节六编码器磁
信号异常
编码器信号幅值错误、
磁模式错误、信号丢
失、信号异常。
1. 请查看是否为固定关节报错,请联系节卡
技术服务人员检查关节或编码器是否异常。
2. 请查看机器人工作环境或本体是否有外部
信号或磁信号干扰。
0x108000
关节一位置偏离
根据伺服位置跟随误差
判断碰撞检测。
1. 请检查机器人是否发生碰撞。
2. 请检查程序加速度是否设置过大。
3. 请检查运动段转接参数设置是否存在异
常。
4. 请检查机器人负载设置是否正确。
0x118000
关节二位置偏离
根据伺服位置跟随误差
判断碰撞检测。
1. 请检查机器人是否发生碰撞。
2. 请检查程序加速度是否设置过大。
3. 请检查运动段转接参数设置是否存在异
常。
4. 请检查机器人负载设置是否正确。
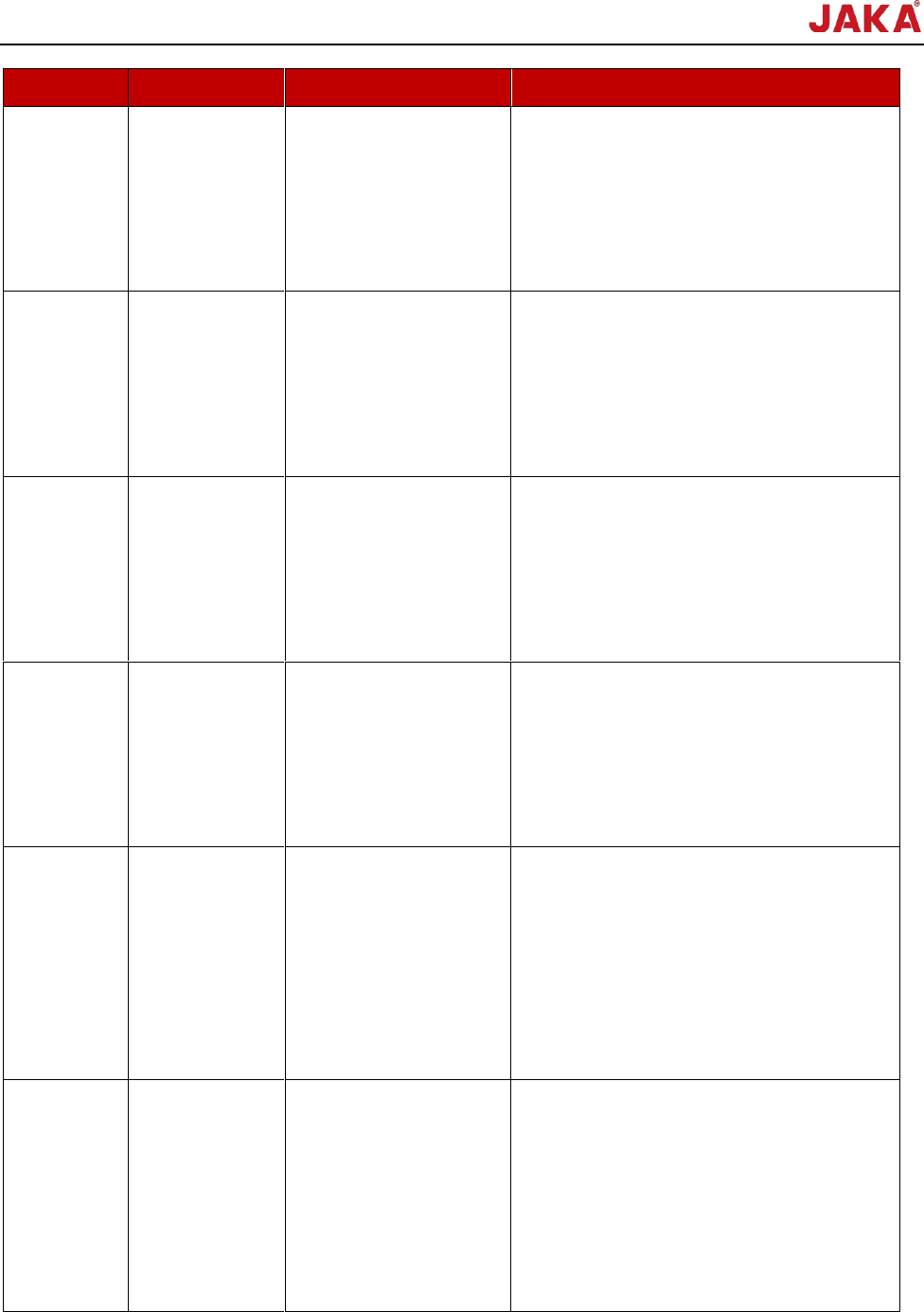
文档版本:3.1 190 / 201 节卡服务手册
错误代码
描述
原因
措施
0x128000
关节三位置偏离
根据伺服位置跟随误差
判断碰撞检测。
1. 请检查机器人是否发生碰撞。
2. 请检查程序加速度是否设置过大。
3. 请检查运动段转接参数设置是否存在异
常。
4. 请检查机器人负载设置是否正确。
0x138000
关节四位置偏离
根据伺服位置跟随误差
判断碰撞检测。
1. 请检查机器人是否发生碰撞。
2. 请检查程序加速度是否设置过大。
3. 请检查运动段转接参数设置是否存在异
常。
4. 请检查机器人负载设置是否正确。
0x148000
关节五位置偏离
根据伺服位置跟随误差
判断碰撞检测。
1. 请检查机器人是否发生碰撞。
2. 请检查程序加速度是否设置过大。
3. 请检查运动段转接参数设置是否存在异
常。
4. 请检查机器人负载设置是否正确。
0x158000
关节六位置偏离
根据伺服位置跟随误差
判断碰撞检测。
1. 请检查机器人是否发生碰撞。
2. 请检查程序加速度是否设置过大。
3. 请检查运动段转接参数设置是否存在异
常。
4. 请检查机器人负载设置是否正确。
0x108001
关节一位置偏离
报警
根据伺服位置跟随误差
判断碰撞检测。
1. 请检查机器人是否发送碰撞。
2. 请检查机器人运动加速度是否设置过大。
3. 请检查机器人是否负载超出要求范围。
4. 请检查软件中机器人安装姿态与实际姿态
是否一致。
5. 请检查运动中是否错误使用运动段转接。
0x118001
关节二位置偏离
报警
根据伺服位置跟随误差
判断碰撞检测。
1. 请检查机器人是否发送碰撞。
2. 请检查机器人运动加速度是否设置过大。
3. 请检查机器人是否负载超出要求范围。
4. 请检查软件中机器人安装姿态与实际姿态
是否一致。
5. 请检查运动中是否错误使用运动段转接。