JAKA 服务手册-zh-V3.1_20231017_20240108182934A001.pdf - 第12页
文档版本: 3.1 12 / 201 节卡服务手册 第 2 章 机器人维修 2.1 J AKA 机器人 下面介绍了节卡机器人 的结构(图片以某一 机型为例) : 2.1.1 无电力驱动的移动 在机器人电源失效或者 未使用电源等紧急情 况下,可以使用以下 方法迫使机器人移 动: 关闭机器人本体的电源后,拆开关节后盖,先 托住机器人,然后手动释放制动器( 按下电磁铁中的滑杆,就可 以释放制动器) 。 注意: 1. 在释放制动器之前请拆 下任…

文档版本:3.1 11 / 201 节卡服务手册
不要在以下情况下使用机器人。否则,不仅给机器人和周围设备造成不良影响,而且还有
可能造成作业人员受重伤:
1. 在任何可燃性的环境下使用;
2. 在有爆炸性的环境下使用;
3. 在存在大量辐射环境下使用;
4. 在水中或者高湿度情况下使用;
5. 以运输人或者动物为目的的情况下使用;
6. 将机器人强受外力挤压情况下使用;
7. 在强磁环境下使用。
文档版本:3.1 12 / 201 节卡服务手册
第 2 章 机器人维修
2.1 JAKA 机器人
下面介绍了节卡机器人的结构(图片以某一机型为例):
2.1.1 无电力驱动的移动
在机器人电源失效或者未使用电源等紧急情况下,可以使用以下方法迫使机器人移动:
关闭机器人本体的电源后,拆开关节后盖,先托住机器人,然后手动释放制动器(按下电磁铁中的滑杆,就可
以释放制动器)。
注意:
1. 在释放制动器之前请拆下任何危险的治具,以避免发生危险情况,这一点极为重要;
2. 若释放任意关节的制动器,则应在释放之前提供合适的机械支撑,这一点极为重要;
3. 始终确保在释放制动器时没有人员位于机械手臂下方;
4. 切勿不必要地转动关节;
释放制动器的步骤:
1. 下使能并关闭控制柜;
2. 拆下关节上的闷盖;
3. 按下电磁铁的滑杆;
4. 推动单关节移动至目标位置;
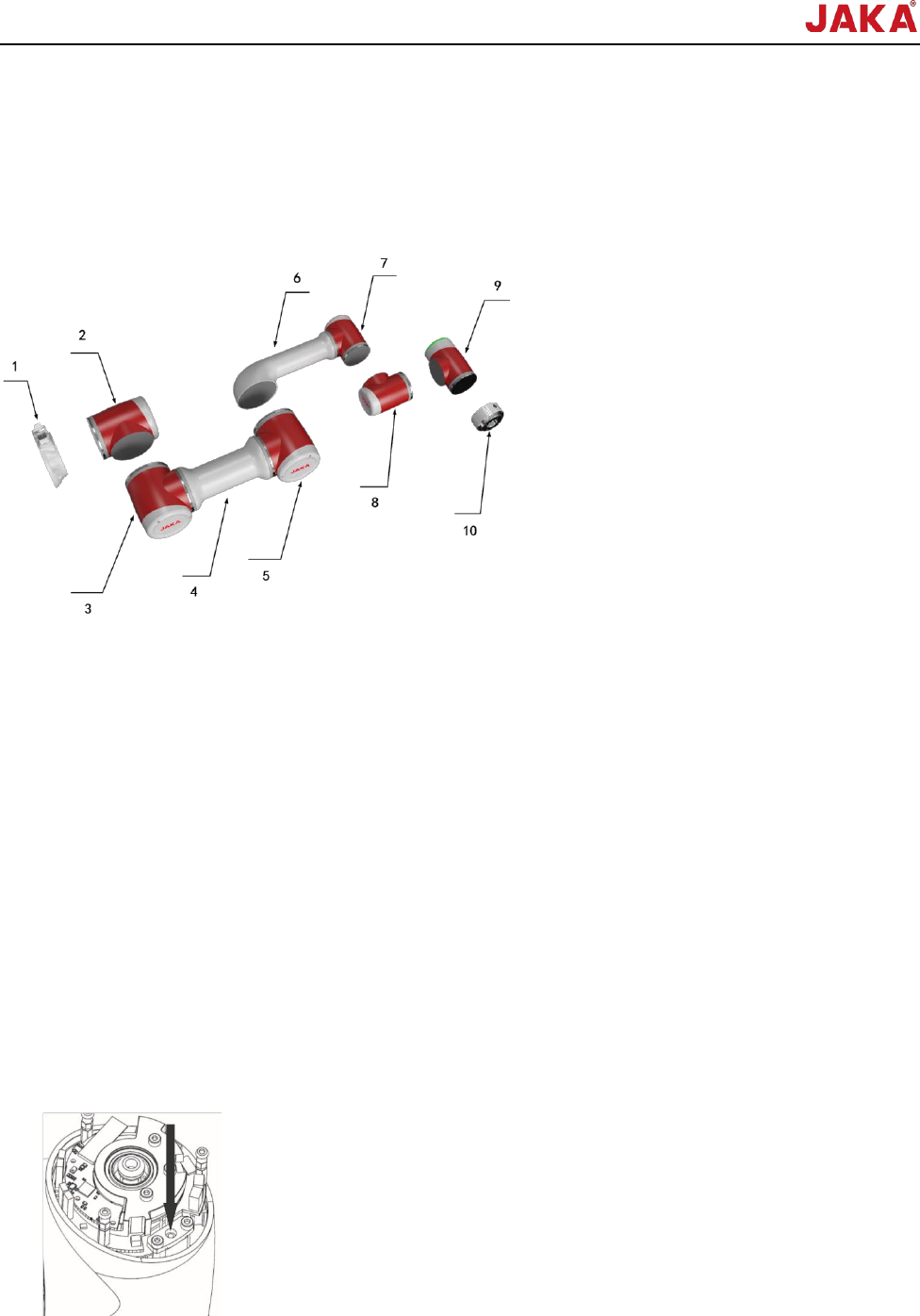
1.底座
2.关节 1
3.关节 2
4.大管臂
5.关节 3
6.小管臂
7.关节 4
8.关节 5
9.关节 6
10.末端法兰
文档版本:3.1 13 / 201 节卡服务手册
5. 在启动使用机器人之前务必确保电磁铁铁芯处于弹出状态,关节后盖是否正确安装完成;
2.2 机器人更换关节
注意:
1. 在进行更换机器人关节前,请将机器人移动至机器人校准姿态(校准姿态详见 2.2.5)。
1)如果机器人还可以上电、上使能,使能机器人后,将机器人手动 JOG 至机器人的校准姿态。
2)如果机器人无法上使能,请关闭机器人本体电源后,参照 2.1.1 按下电磁铁的滑杆,手动将机器人移动
至校准姿态。
2. 机器人的精度,分为重复定位精度和绝对定位精度:
1)对于只对重复定位精度有要求的场景(比如搬运、码垛、点胶、点焊),这些场景只要每次都能运行到
同一个固定的点位就可以了,是可以更换关节的;
2)对绝对定位精度要求较高的场景,不建议更换关节,当更换完关节后,会存在绝对定位精度丢失情况,
轨迹精度会降低,无法满足工艺要求的情况;此种场景,必须返厂进行激光跟踪仪标定,方可恢复绝对定位精
度;存在要求绝对定位精度的场景,主要为以下场景:
A. 离线编程场景(导入机械模型,自动生成示教轨迹);
B. 视觉(2D、3D)用于视觉引导、纠偏等场景;
C. 存在具体的工艺要求,如直线涂胶/焊接,长距离直线穿孔;圆弧涂胶/焊接等,这都是对轨迹精度有
要求的;
3. 当完成更换关节后,需先升级伺服固件版本;升级完成后,还需升级相关 tar.gz 文件;伺服固件版本
与相关 tar.gz 文件升级方式一致,请详见 2.2.4,都是选择“升级固件”;至于固件文件,请咨询节卡技术服务
人员;
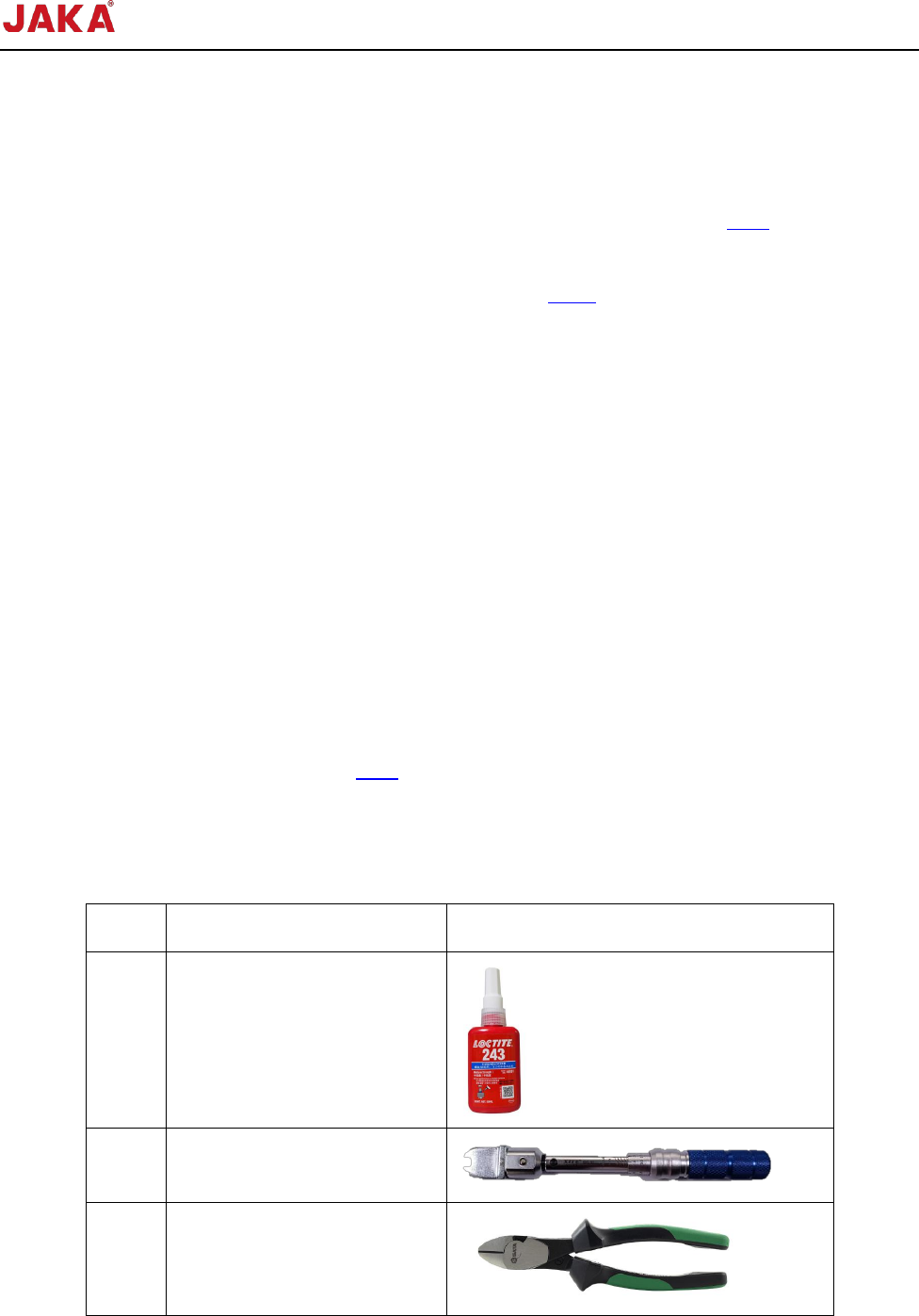
2.2.1 准备工具
序号
名称
示例图
1
LOCTITE243 螺纹胶
2
扭矩扳手
3
斜口钳