JAKA 服务手册-zh-V3.1_20231017_20240108182934A001.pdf - 第121页
文档版本: 3.1 121 / 201 节卡服务手册 第 6 章 电气图
文档版本:3.1 121 / 201 节卡服务手册
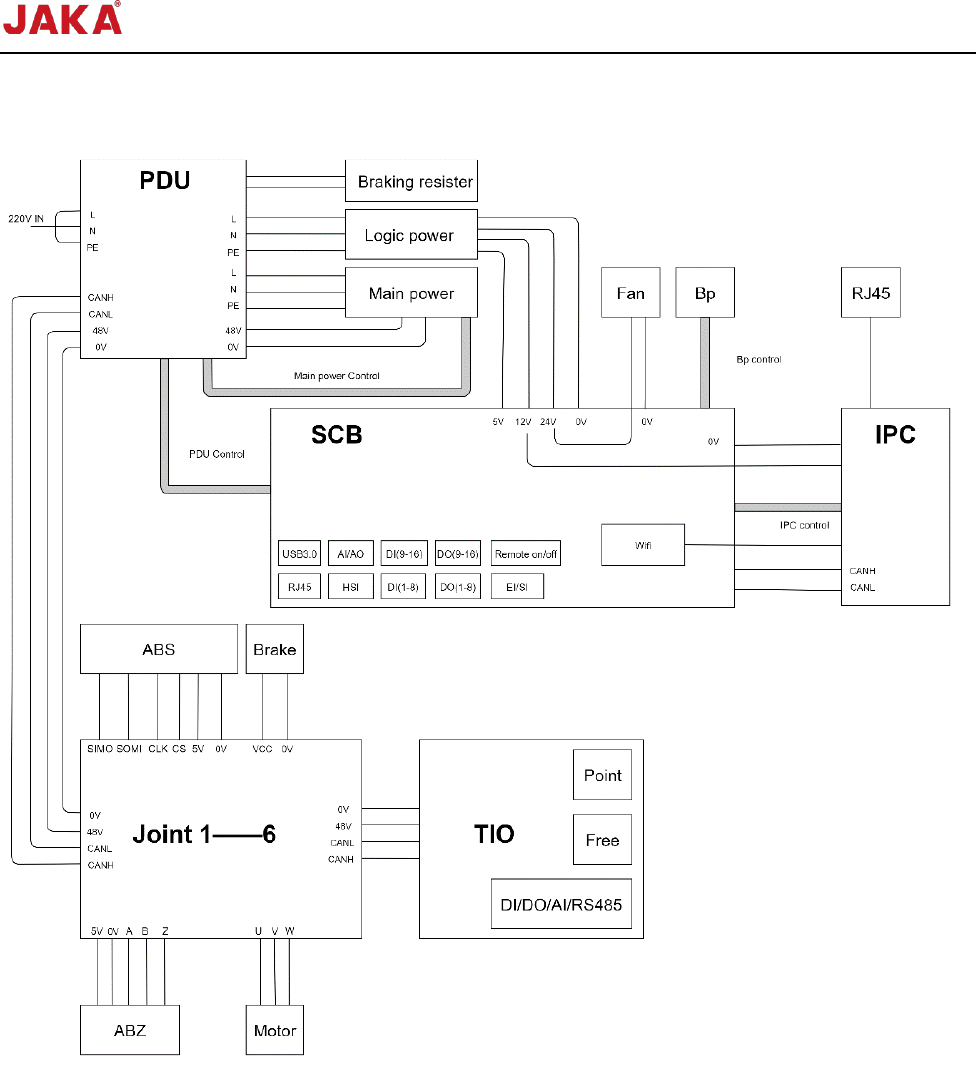
第 6 章 电气图
文档版本:3.1 122 / 201 节卡服务手册
第 7 章 打包及运输
在装运机器人、控制柜或任何备品备件前,请注意以下事项:
注意:
1. 装运前需拆除外部工具和外部电气连接。如果第三方产品不能安全地拆除,或禁止执行所需
的维修后测试。节卡机器人有权拒绝接收。节卡机器人对第三方货物的退换货不承担任何责任。
2. 发货前,请确认机器人、控制柜、备品备件等物品已按标准打包完毕,请以节卡原包装退还节卡产品。
3. 维修过程中可能会升级软件及固件。因此,安装维修后或更换后的机器人、控制柜或其他零部件后,
需检查软件版本,并根据需要进行升级。
4. 如果机器人、控制柜、零部件接触过危险化学品或材料,或在有危险化学品或材料的环境中运行,则
必须在装运前进行清洁。如果节卡机器人发现机器人、控制柜、零部件无法进行安全的维修,节卡机器人保留
清洁机器人、控制柜、零部件的权利,或者拒绝接收,并将零部件寄回,费用由客户承担。
打包步骤:
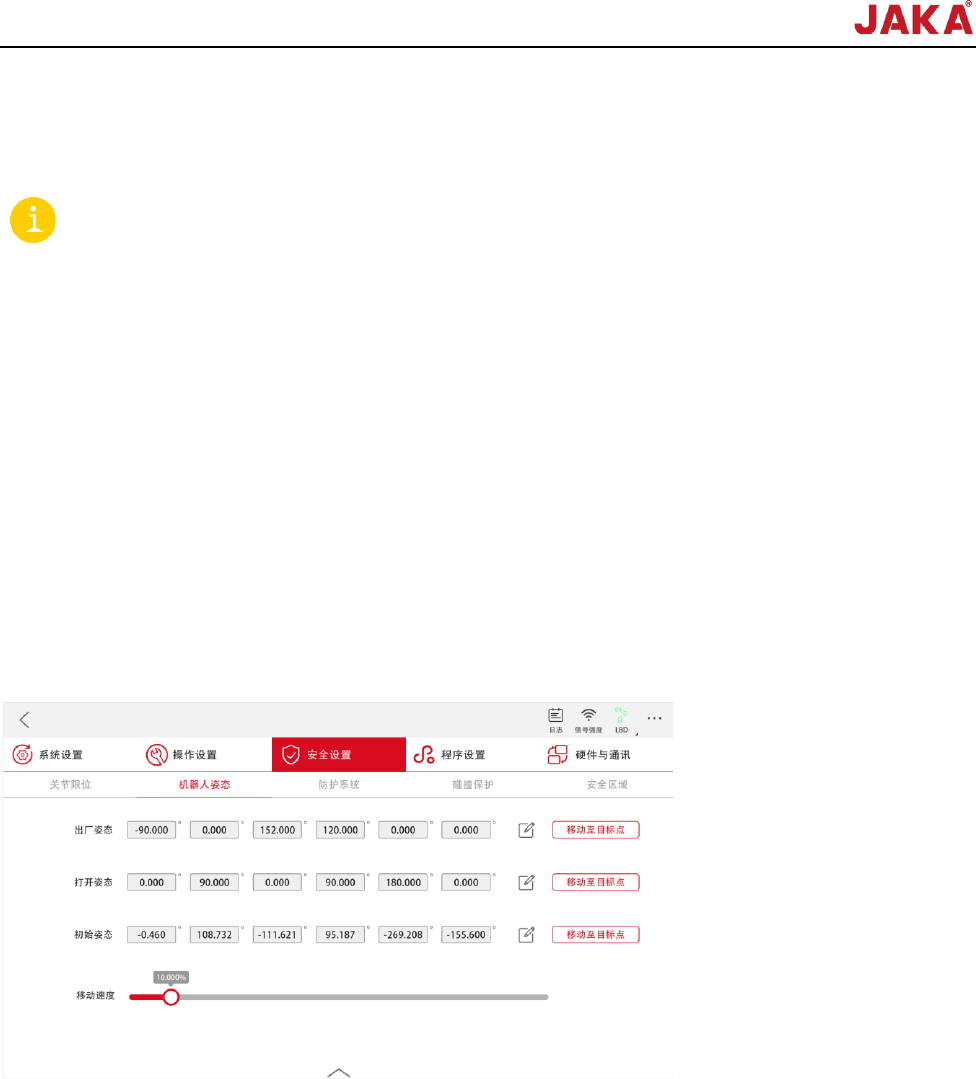
1. 将机器人调整至打包姿态:
打开 JAKA Zu APP,连接机器人,点击【设置】→【安全设置】→【机器人姿态】进入姿态设置界面,长按出
厂姿态后的“移至目标点”;
2. 将机器人下使能下电,断开控制柜电源,并断开一切连接;
3. 将机器人和控制柜装入原包装箱,确保放置位置正确。