JAKA 服务手册-zh-V3.1_20231017_20240108182934A001.pdf - 第123页
文档版本: 3.1 123 / 201 节卡服务手册 附录 附录 一:错误代码表 错误来源: 0 :控制器 1 :伺服 F : APP 报错关节: 0-5 :关节 1 至关节 6 F : APP 错误代码 描述 原因 措施 0x0F0001 机器人本体未上 电 控制器执行指令时,检 测到机器人未上电 确认机器人本体电源是 否打开;如果机器人 本体电源未打开,请首 先打开机器人本体电 源 0x0F0002 机器人未使能 控制器执行指令时检…
文档版本:3.1 122 / 201 节卡服务手册
第 7 章 打包及运输
在装运机器人、控制柜或任何备品备件前,请注意以下事项:
注意:
1. 装运前需拆除外部工具和外部电气连接。如果第三方产品不能安全地拆除,或禁止执行所需
的维修后测试。节卡机器人有权拒绝接收。节卡机器人对第三方货物的退换货不承担任何责任。
2. 发货前,请确认机器人、控制柜、备品备件等物品已按标准打包完毕,请以节卡原包装退还节卡产品。
3. 维修过程中可能会升级软件及固件。因此,安装维修后或更换后的机器人、控制柜或其他零部件后,
需检查软件版本,并根据需要进行升级。
4. 如果机器人、控制柜、零部件接触过危险化学品或材料,或在有危险化学品或材料的环境中运行,则
必须在装运前进行清洁。如果节卡机器人发现机器人、控制柜、零部件无法进行安全的维修,节卡机器人保留
清洁机器人、控制柜、零部件的权利,或者拒绝接收,并将零部件寄回,费用由客户承担。
打包步骤:
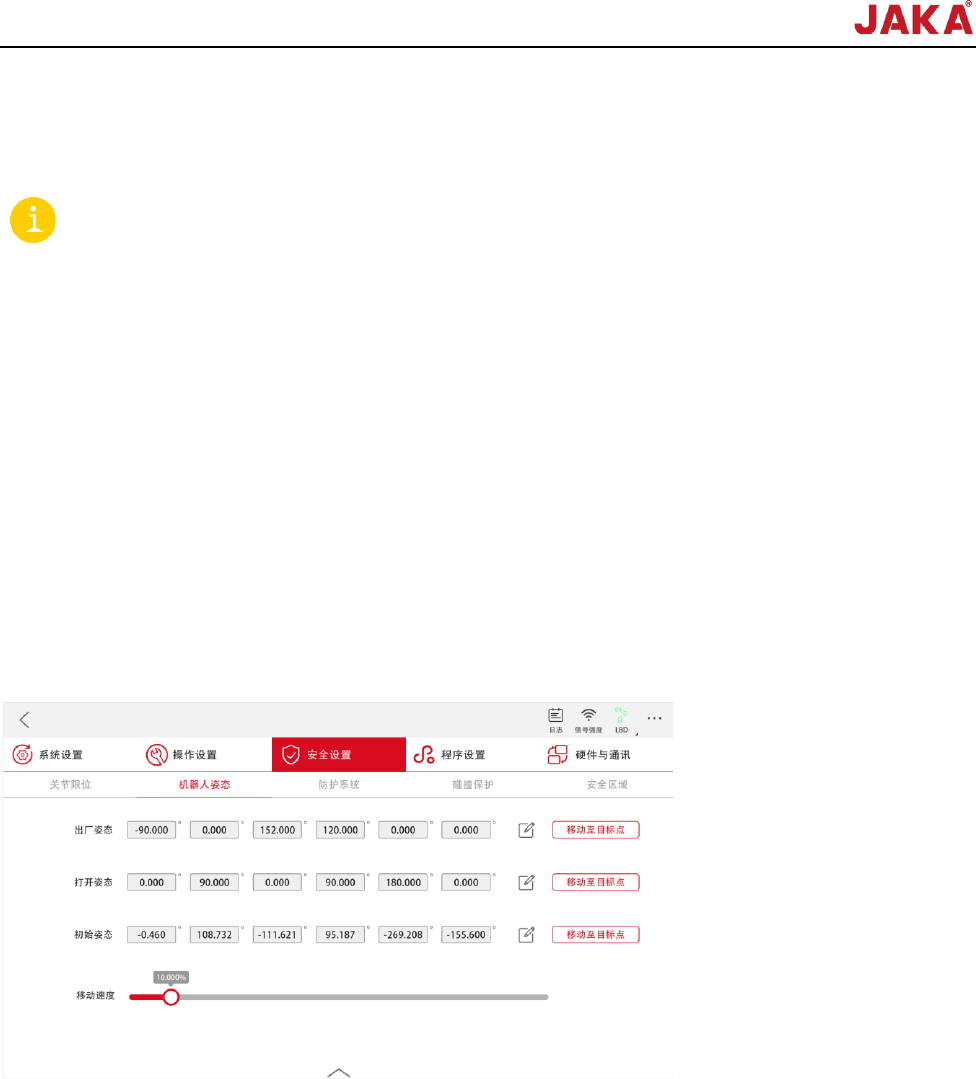
1. 将机器人调整至打包姿态:
打开 JAKA Zu APP,连接机器人,点击【设置】→【安全设置】→【机器人姿态】进入姿态设置界面,长按出
厂姿态后的“移至目标点”;
2. 将机器人下使能下电,断开控制柜电源,并断开一切连接;
3. 将机器人和控制柜装入原包装箱,确保放置位置正确。
文档版本:3.1 123 / 201 节卡服务手册
附录
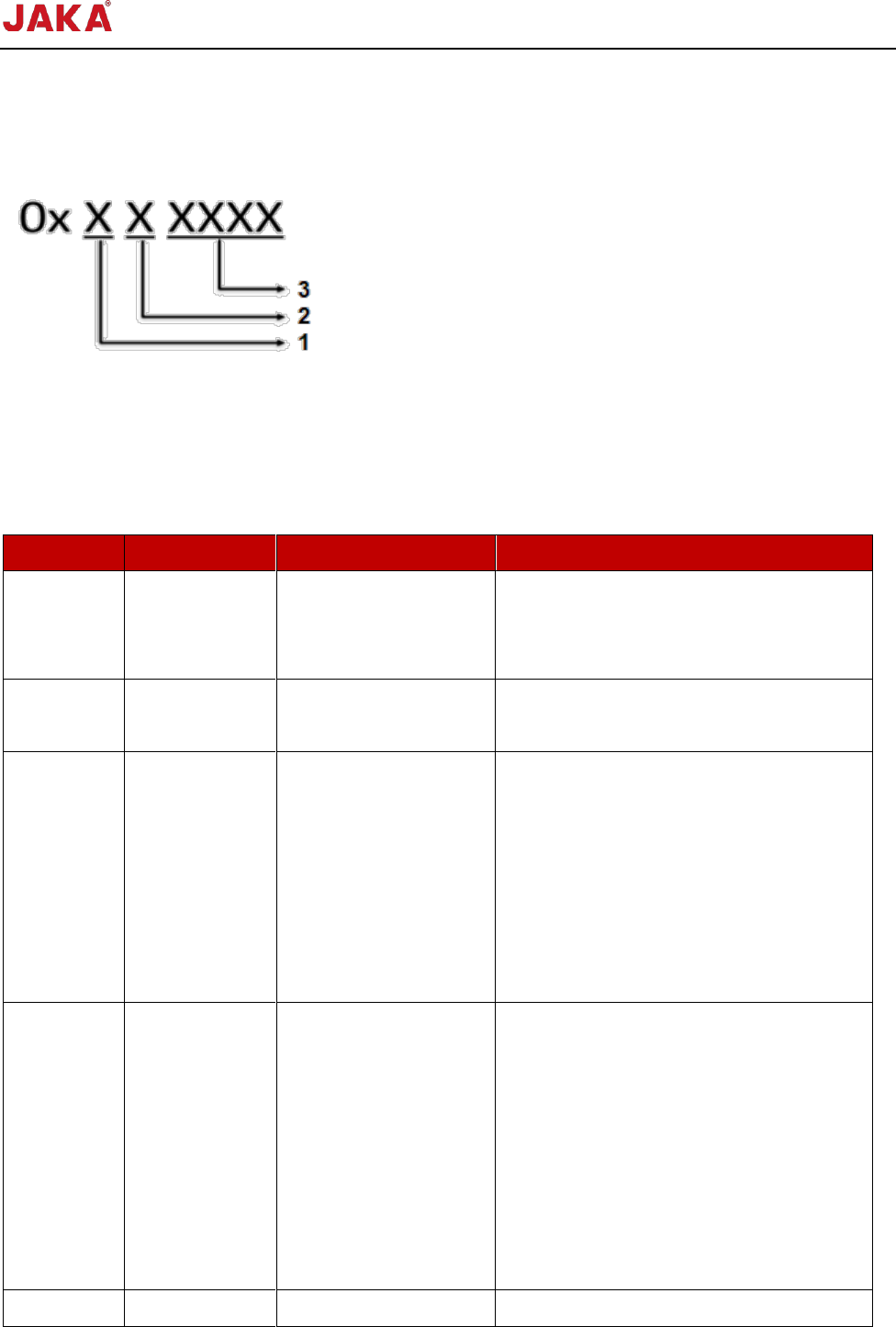
附录 一:错误代码表
错误来源:
0:控制器
1:伺服
F:APP
报错关节:
0-5:关节 1 至关节 6
F:APP
错误代码
描述
原因
措施
0x0F0001
机器人本体未上
电
控制器执行指令时,检
测到机器人未上电
确认机器人本体电源是否打开;如果机器人
本体电源未打开,请首先打开机器人本体电
源
0x0F0002
机器人未使能
控制器执行指令时检测
到机器人未使能
确认机器人使能是否打开;如果未打开,请
先开启机器人使能
0x0F0003
当前模式下无法
进行此操作
控制器内部具有多种模
式,特定的操作进允许
在特定的模式下运行。
模式的切换由内部自动
完成,当出现该问题时
为未妥善处理的操作权
限导致。
先退出当前模式,再进行操作,例如将机器
人下使能后再继续操作。
0x0F0004
运动学逆解计算
失败
运动学逆解计算失败,
原因如下:
(1)给定笛卡尔空间位
姿超出机器人可达空
间;
(2)给定笛卡尔空间位
姿在给定的参考角度确
定的解空间内无解。
(1)在手动界面中进入坐标编辑界面,输
入点位信息进行验证;
(2)手动 JOG,检查机器人目标点或目标
路径位姿姿态是否可达,如果可达请更换姿
态进行运动学逆解计算。
0x0F0006
机器人关节达到
JOG 运动时,机器人已
检查机器人当前位置是否已到达限位,机器
1. 错误来源
2. 报错关节
3. 具体错误代码
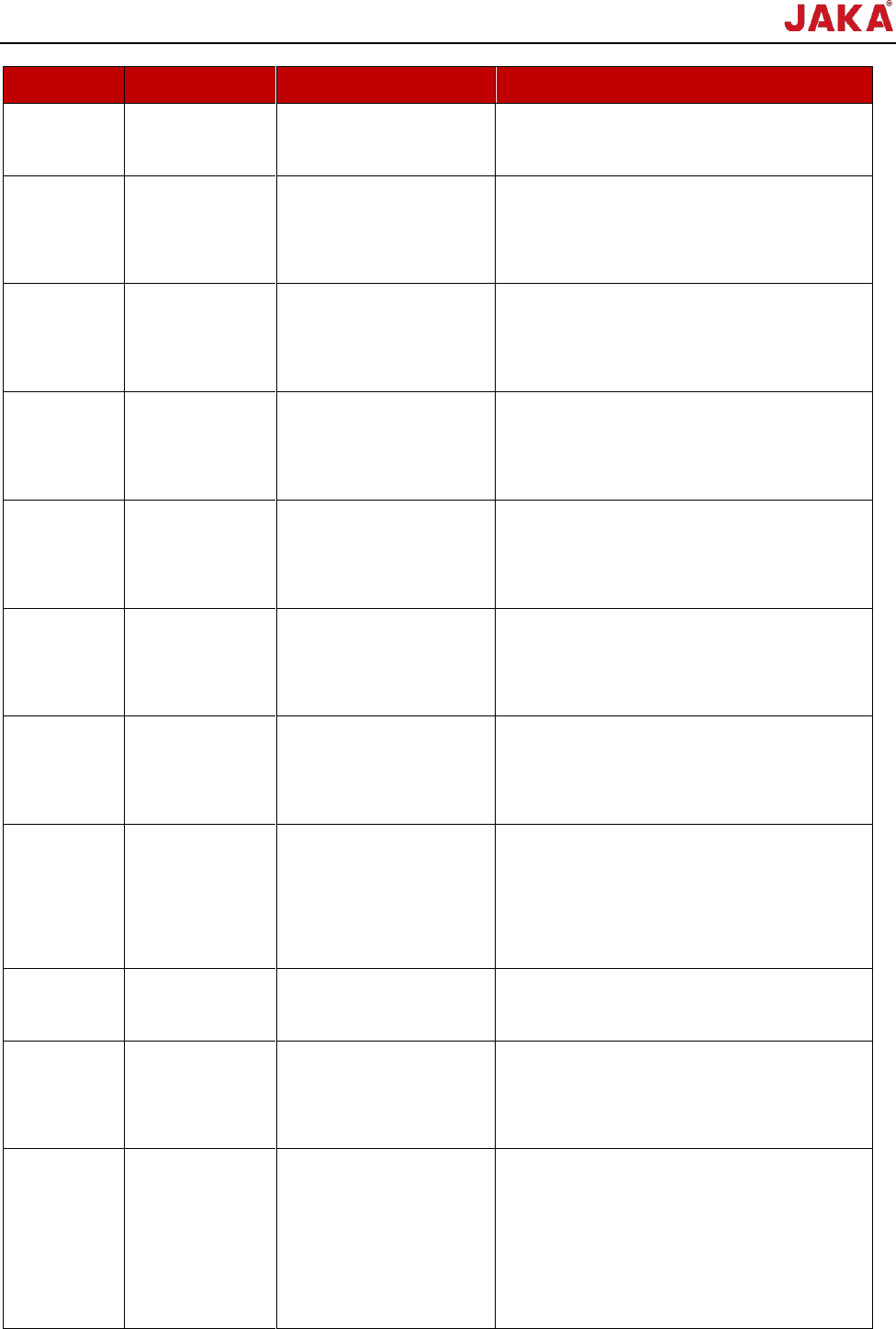
文档版本:3.1 124 / 201 节卡服务手册
错误代码
描述
原因
措施
正的硬限位
经到达限位,但指令仍
然往限位方向运动。
人运动无法超过限位。
0x0F0007
机器人关节达到
负的硬限位
JOG 运动时,机器人已
经到达限位,但指令仍
然往限位方向运动。
检查机器人当前位置是否已到达限位,机器
人运动无法超过限位。
0x0F0008
机器人关节达到
正的软限位
JOG 运动时,机器人已
经到达限位,但指令仍
然往限位方向运动。
检查机器人当前位置是否已到达限位,机器
人运动无法超过限位。
0x0F0009
机器人关节达到
负的软限位
JOG 运动时,机器人已
经到达限位,但指令仍
然往限位方向运动。
检查机器人当前位置是否已到达限位,机器
人运动无法超过限位。
0x0F000A
笛卡尔目标位置
超过正的最大位
置限制
笛卡尔空间运动给定的
指令位置超过轴的最大
限制。
请检查给定笛卡尔空间目标是否超过臂展范
围。
0x0F000B
笛卡尔目标位置
超过负的最大位
置限制
笛卡尔空间运动给定的
指令位置超过轴的最大
限制。
请检查给定笛卡尔空间目标是否超过臂展范
围。
0x0F000E
关节回零过程中
无法进行手动操
作
机器人回零设置过程中
进行了机器人的手动运
动控制。
确认机器人当前是否正在回零,如是则等待
机器人回零过程完成后继续操作。
0x0F000F
指令关节索引无
效
控制笛卡尔空间单轴或
者关节空间单关节运动
时,给定轴/关节索引无
效导致。
请检查指令中所给索引是否正确;如果指令
正确,请导出日志联系节卡技术服务人员。
0x0F0010
运动指令速度无
效
内部预留
内部预留
0x0F0011
运动指令目标
位置超过机器限
制
关节运动、或直线运动
的目标位置超过机器人
的限位。
手动 JOG ,检查目标位置是否可达,是否
会超过关节限位。
0x0F0016
机器人关节处于
软限位
机器人关节处于软限
位,无法完成指令操
作。
检查当前机器人关节状态,是否已到达关节
限位,若已到达,无法继续运动朝超限方向
运动,只能往非超限方向运动,请在示教页
面将超限关节 JOG 回关节限位范围内,或
在设置页面修改限位。