JAKA 服务手册-zh-V3.1_20231017_20240108182934A001.pdf - 第124页
文档版本: 3.1 124 / 201 节卡服务手册 错误代码 描述 原因 措施 正的硬限位 经到达限位,但指令仍 然往限位方向运动。 人运动无法超过限位。 0x0F0007 机器人关节达到 负的硬限位 JOG 运动时,机器人已 经到达限位,但指令仍 然往限位方向运动。 检查机器人当前位置是 否已到达限位,机器 人运动无法超过限位。 0x0F0008 机器人关节达到 正的软限位 JOG 运动时,机器人已 经到达限位,但指令仍 然往限位方…
文档版本:3.1 123 / 201 节卡服务手册
附录
附录 一:错误代码表
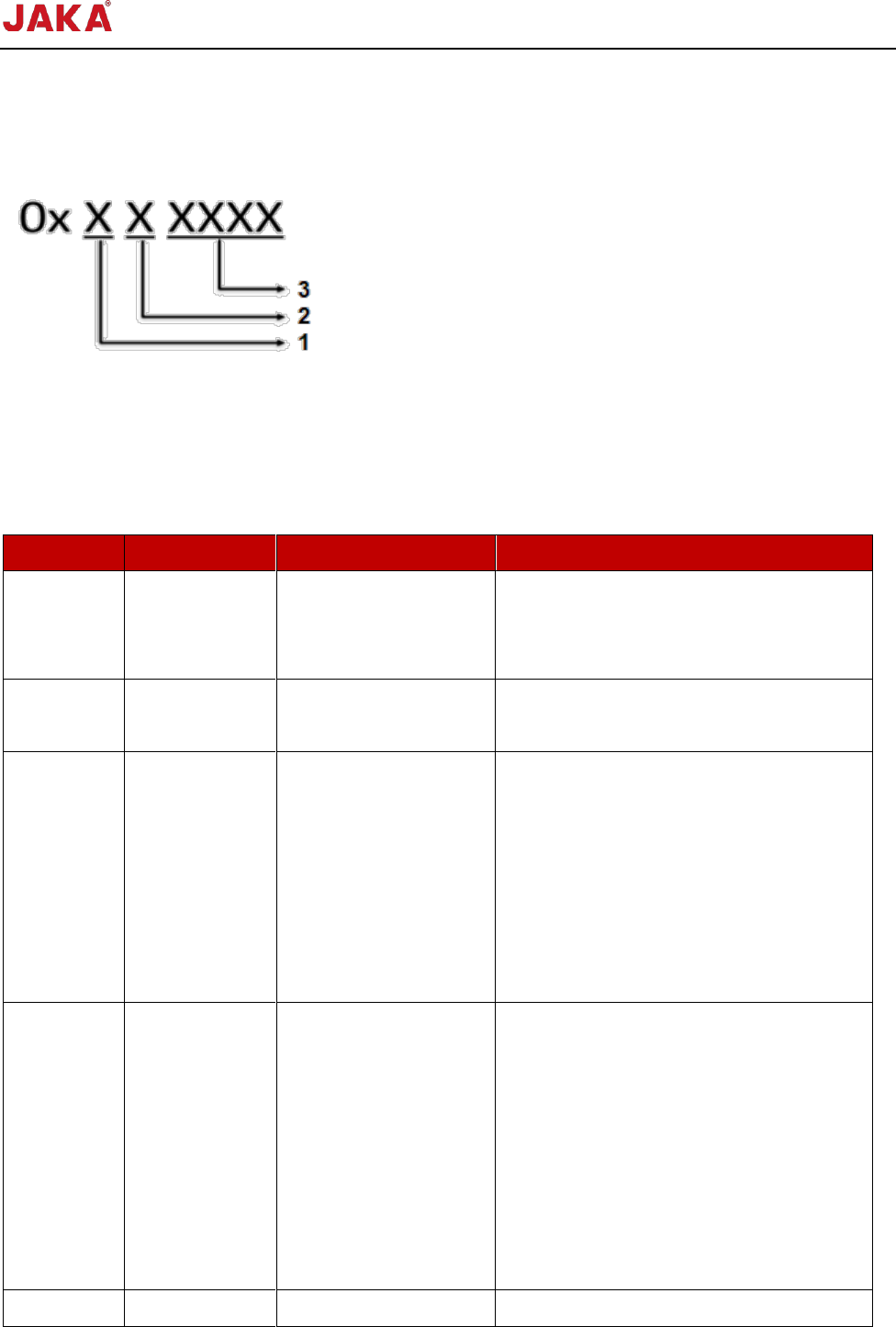
错误来源:
0:控制器
1:伺服
F:APP
报错关节:
0-5:关节 1 至关节 6
F:APP
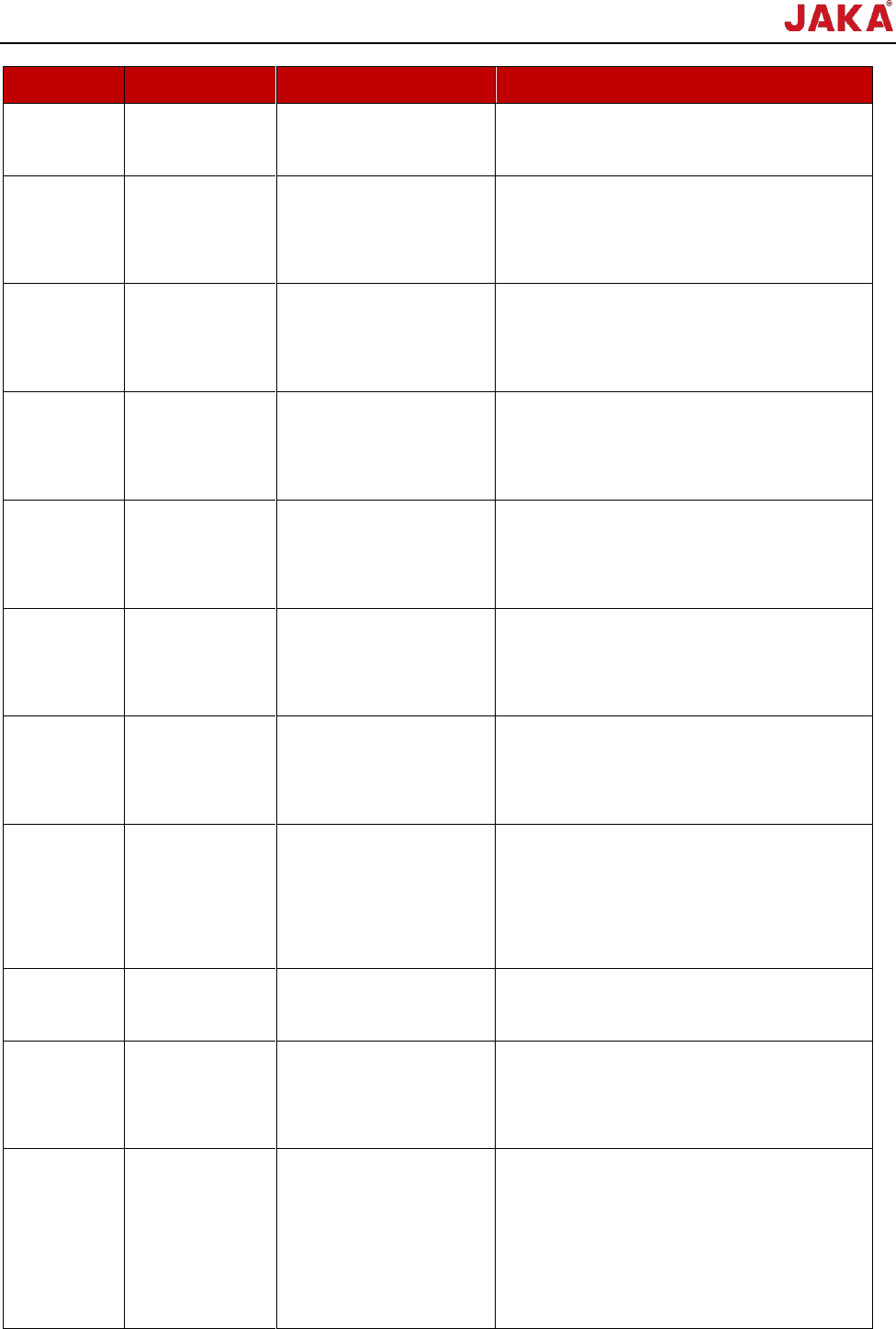
错误代码
描述
原因
措施
0x0F0001
机器人本体未上
电
控制器执行指令时,检
测到机器人未上电
确认机器人本体电源是否打开;如果机器人
本体电源未打开,请首先打开机器人本体电
源
0x0F0002
机器人未使能
控制器执行指令时检测
到机器人未使能
确认机器人使能是否打开;如果未打开,请
先开启机器人使能
0x0F0003
当前模式下无法
进行此操作
控制器内部具有多种模
式,特定的操作进允许
在特定的模式下运行。
模式的切换由内部自动
完成,当出现该问题时
为未妥善处理的操作权
限导致。
先退出当前模式,再进行操作,例如将机器
人下使能后再继续操作。
0x0F0004
运动学逆解计算
失败
运动学逆解计算失败,
原因如下:
(1)给定笛卡尔空间位
姿超出机器人可达空
间;
(2)给定笛卡尔空间位
姿在给定的参考角度确
定的解空间内无解。
(1)在手动界面中进入坐标编辑界面,输
入点位信息进行验证;
(2)手动 JOG,检查机器人目标点或目标
路径位姿姿态是否可达,如果可达请更换姿
态进行运动学逆解计算。
0x0F0006
机器人关节达到
JOG 运动时,机器人已
检查机器人当前位置是否已到达限位,机器
1. 错误来源
2. 报错关节
3. 具体错误代码
文档版本:3.1 124 / 201 节卡服务手册
错误代码
描述
原因
措施
正的硬限位
经到达限位,但指令仍
然往限位方向运动。
人运动无法超过限位。
0x0F0007
机器人关节达到
负的硬限位
JOG 运动时,机器人已
经到达限位,但指令仍
然往限位方向运动。
检查机器人当前位置是否已到达限位,机器
人运动无法超过限位。
0x0F0008
机器人关节达到
正的软限位
JOG 运动时,机器人已
经到达限位,但指令仍
然往限位方向运动。
检查机器人当前位置是否已到达限位,机器
人运动无法超过限位。
0x0F0009
机器人关节达到
负的软限位
JOG 运动时,机器人已
经到达限位,但指令仍
然往限位方向运动。
检查机器人当前位置是否已到达限位,机器
人运动无法超过限位。
0x0F000A
笛卡尔目标位置
超过正的最大位
置限制
笛卡尔空间运动给定的
指令位置超过轴的最大
限制。
请检查给定笛卡尔空间目标是否超过臂展范
围。
0x0F000B
笛卡尔目标位置
超过负的最大位
置限制
笛卡尔空间运动给定的
指令位置超过轴的最大
限制。
请检查给定笛卡尔空间目标是否超过臂展范
围。
0x0F000E
关节回零过程中
无法进行手动操
作
机器人回零设置过程中
进行了机器人的手动运
动控制。
确认机器人当前是否正在回零,如是则等待
机器人回零过程完成后继续操作。
0x0F000F
指令关节索引无
效
控制笛卡尔空间单轴或
者关节空间单关节运动
时,给定轴/关节索引无
效导致。
请检查指令中所给索引是否正确;如果指令
正确,请导出日志联系节卡技术服务人员。
0x0F0010
运动指令速度无
效
内部预留
内部预留
0x0F0011
运动指令目标
位置超过机器限
制
关节运动、或直线运动
的目标位置超过机器人
的限位。
手动 JOG ,检查目标位置是否可达,是否
会超过关节限位。
0x0F0016
机器人关节处于
软限位
机器人关节处于软限
位,无法完成指令操
作。
检查当前机器人关节状态,是否已到达关节
限位,若已到达,无法继续运动朝超限方向
运动,只能往非超限方向运动,请在示教页
面将超限关节 JOG 回关节限位范围内,或
在设置页面修改限位。
文档版本:3.1 125 / 201 节卡服务手册
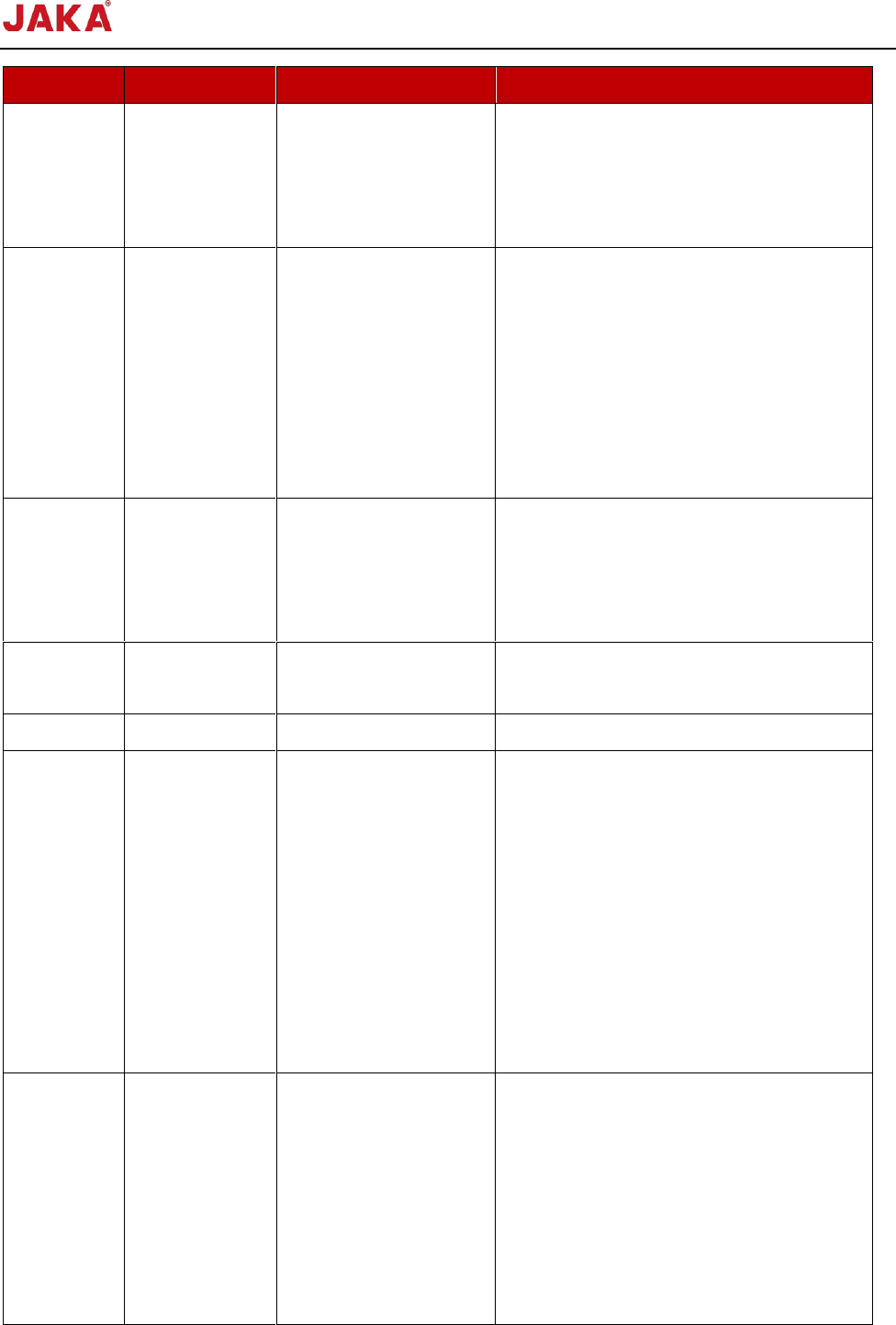
错误代码
描述
原因
措施
0x0F0017
运动指令目标位
置不可达
运动指令目标位置不可
达。
目标位置超出工作范围或处于奇异点。 手动
操作检查是否能关节运动到目标点,如果可
以,考虑改变当前机器人的姿态,从其它的
路径或姿态到达目标点。
0x0F0018
到达奇异点保护
性停止
机器人在运动路径中即
将达到奇异构型,无法
继续进行笛卡尔空间运
动。该错误一般在计算
逆解时出错或者计算逆
解与上一周期处于不同
解空间时报出。
检查当前机器人路径及姿态是否可达,如不
可达,更换初始姿态或路径来到达目标位
置。如确认指令路径没有问题,请收集相关
数据并联系节卡技术服务人员。
0x0F0019
CAN 设备初始
化失败
CAN 设备初始化失败。
离线仿真环境下,没有 CAN 设备导致报
错,后续优化。实际机器环境下,请重启机
器人,若持续出现请联系节卡技术服务人
员。
0x0F001A
一键升级超时
一键升级时间过长
请检查网络情况以及设备情况后再进行作
业。
0x0F001B
一键升级异常
一键升级失败
请检查一键升级包的来源与有效性。
0x0F0020
直线运动到目标
位置失败
直线运动到目标位置失
败。一般笛卡尔运动
(直线或圆弧运动)过
程中经过奇异点时报
出,尤其是初始点或终
止点为奇异点时。
直线运动路径点或目标点不可达或经过奇异
点,手动操作检查是否能关节运动到目标
点,如果可以,考虑改变当前机器人的姿
态,从其它的路径或姿态到达目标点。
注意:由于程序指针会超前实际动作指针,
因此该错误提示可能会提前触发,即解析到
了但还未执行到对应行时就会报出。在处理
该问题时请检查作业程序中后续指令是否基
于当前位置皆可达。
0x0F0021
机器人型号不支
持
机器人型号不支持。一
般来说最新的控制器软
件会支持现有的所有机
器人模型,但在旧的控
制器软件上连接新的型
号的机器人会出现该问
题。出现该问题时,机
APP 信息页面查看机器人序列号,联系节卡
技术服务人员获取支持的软件版本。