JAKA 服务手册-zh-V3.1_20231017_20240108182934A001.pdf - 第175页
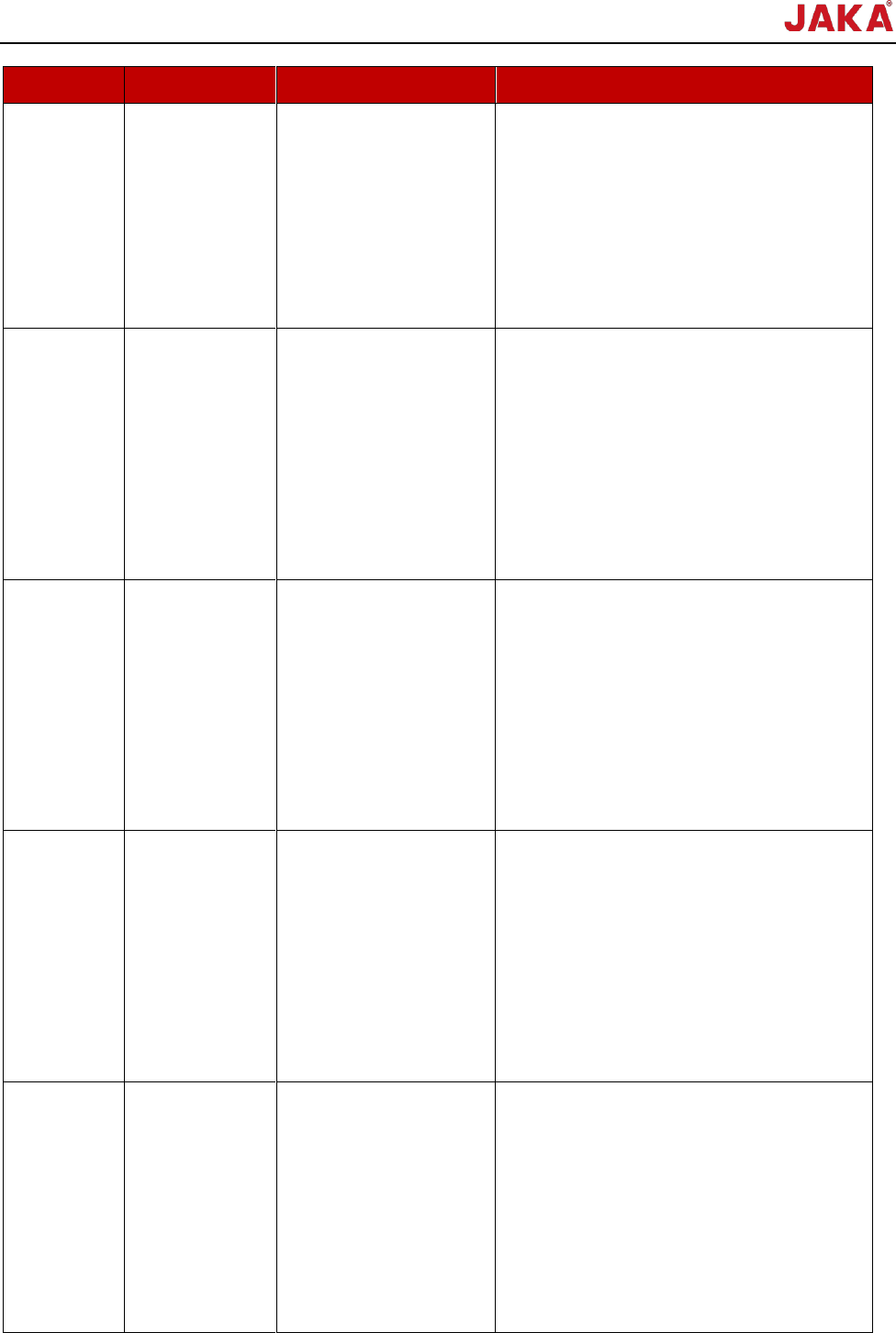
文档版本: 3.1 175 / 201 节卡服务手册 错误代码 描述 原因 措施 0x153220 关节六伺服欠压 检测到母线电压,超出 硬件驱动板的欠压阈 值。 1. 请检查机器 人负载或运动加速度是 否设置 过大,请尝试降低运行 工况使用。 2. 请尝试检查 机器人重载线是否连接 异常。 3. 请联系节卡 技术服务人员,协助检 查驱动 板硬件是否异常。 4. 请联系节卡 技术服务人员,协助检 查通讯 或电控柜电源是否异常 。 0x1…
文档版本:3.1 174 / 201 节卡服务手册
错误代码
描述
原因
措施
或电控柜电源是否异常。
0x113220
关节二伺服欠压
检测到母线电压,超出
硬件驱动板的欠压阈
值。
1. 请检查机器人负载或运动加速度是否设置
过大,请尝试降低运行工况使用。
2. 请尝试检查机器人重载线是否连接异常。
3. 请联系节卡技术服务人员,协助检查驱动
板硬件是否异常。
4. 请联系节卡技术服务人员,协助检查通讯
或电控柜电源是否异常。
0x123220
关节三伺服欠压
检测到母线电压,超出
硬件驱动板的欠压阈
值。
1. 请检查机器人负载或运动加速度是否设置
过大,请尝试降低运行工况使用。
2. 请尝试检查机器人重载线是否连接异常。
3. 请联系节卡技术服务人员,协助检查驱动
板硬件是否异常。
4. 请联系节卡技术服务人员,协助检查通讯
或电控柜电源是否异常。
0x133220
关节四伺服欠压
检测到母线电压,超出
硬件驱动板的欠压阈
值。
1. 请检查机器人负载或运动加速度是否设置
过大,请尝试降低运行工况使用。
2. 请尝试检查机器人重载线是否连接异常。
3. 请联系节卡技术服务人员,协助检查驱动
板硬件是否异常。
4. 请联系节卡技术服务人员,协助检查通讯
或电控柜电源是否异常。
0x143220
关节五伺服欠压
检测到母线电压,超出
硬件驱动板的欠压阈
值。
1. 请检查机器人负载或运动加速度是否设置
过大,请尝试降低运行工况使用。
2. 请尝试检查机器人重载线是否连接异常。
3. 请联系节卡技术服务人员,协助检查驱动
板硬件是否异常。
4. 请联系节卡技术服务人员,协助检查通讯
或电控柜电源是否异常。
文档版本:3.1 175 / 201 节卡服务手册
错误代码
描述
原因
措施
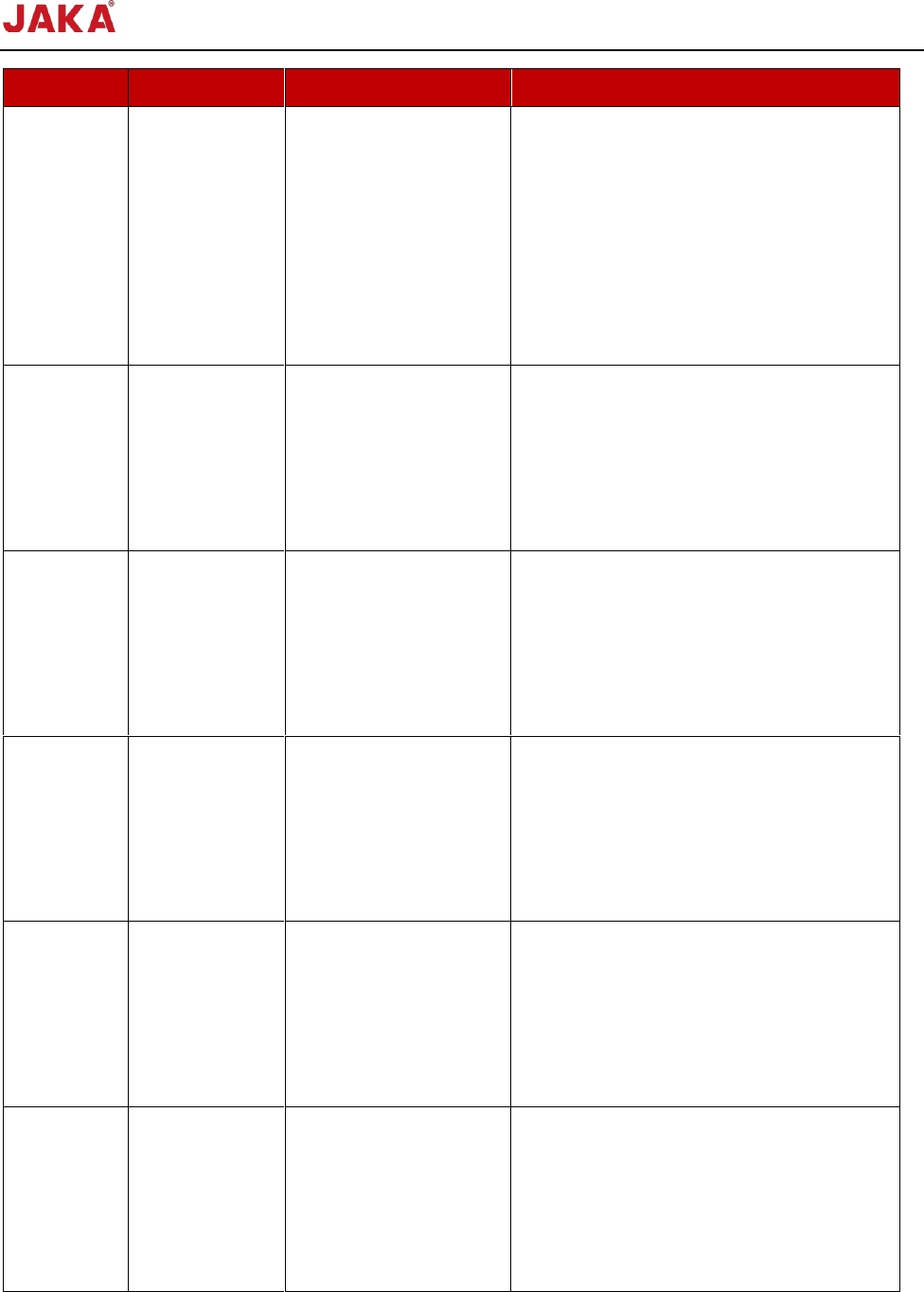
0x153220
关节六伺服欠压
检测到母线电压,超出
硬件驱动板的欠压阈
值。
1. 请检查机器人负载或运动加速度是否设置
过大,请尝试降低运行工况使用。
2. 请尝试检查机器人重载线是否连接异常。
3. 请联系节卡技术服务人员,协助检查驱动
板硬件是否异常。
4. 请联系节卡技术服务人员,协助检查通讯
或电控柜电源是否异常。
0x103210
关节一伺服过压
检测到母线电压,超出
硬件驱动板的过压阈
值。
1. 请检查机器人负载或运动加速度是否设置
过大,请尝试降低运行工况使用。
2. 请尝试检查电控柜泄放板是否异常。
3. 请联系节卡技术服务人员,协助检查驱动
板硬件是否异常。
0x113210
关节二伺服过压
检测到母线电压,超出
硬件驱动板的过压阈
值。
1. 请检查机器人负载或运动加速度是否设置
过大,请尝试降低运行工况使用。
2. 请尝试检查电控柜泄放板是否异常。
3. 请联系节卡技术服务人员,协助检查驱动
板硬件是否异常。
0x123210
关节三伺服过压
检测到母线电压,超出
硬件驱动板的过压阈
值。
1. 请检查机器人负载或运动加速度是否设置
过大,请尝试降低运行工况使用。
2. 请尝试检查电控柜泄放板是否异常。
3. 请联系节卡技术服务人员,协助检查驱动
板硬件是否异常。
0x133210
关节四伺服过压
检测到母线电压,超出
硬件驱动板的过压阈
值。
1. 请检查机器人负载或运动加速度是否设置
过大,请尝试降低运行工况使用。
2. 请尝试检查电控柜泄放板是否异常。
3. 请联系节卡技术服务人员,协助检查驱动
板硬件是否异常。
0x143210
关节五伺服过压
检测到母线电压,超出
硬件驱动板的过压阈
值。
1. 请检查机器人负载或运动加速度是否设置
过大,请尝试降低运行工况使用。
2. 请尝试检查电控柜泄放板是否异常。
3. 请联系节卡技术服务人员,协助检查驱动
板硬件是否异常。
文档版本:3.1 176 / 201 节卡服务手册
错误代码
描述
原因
措施
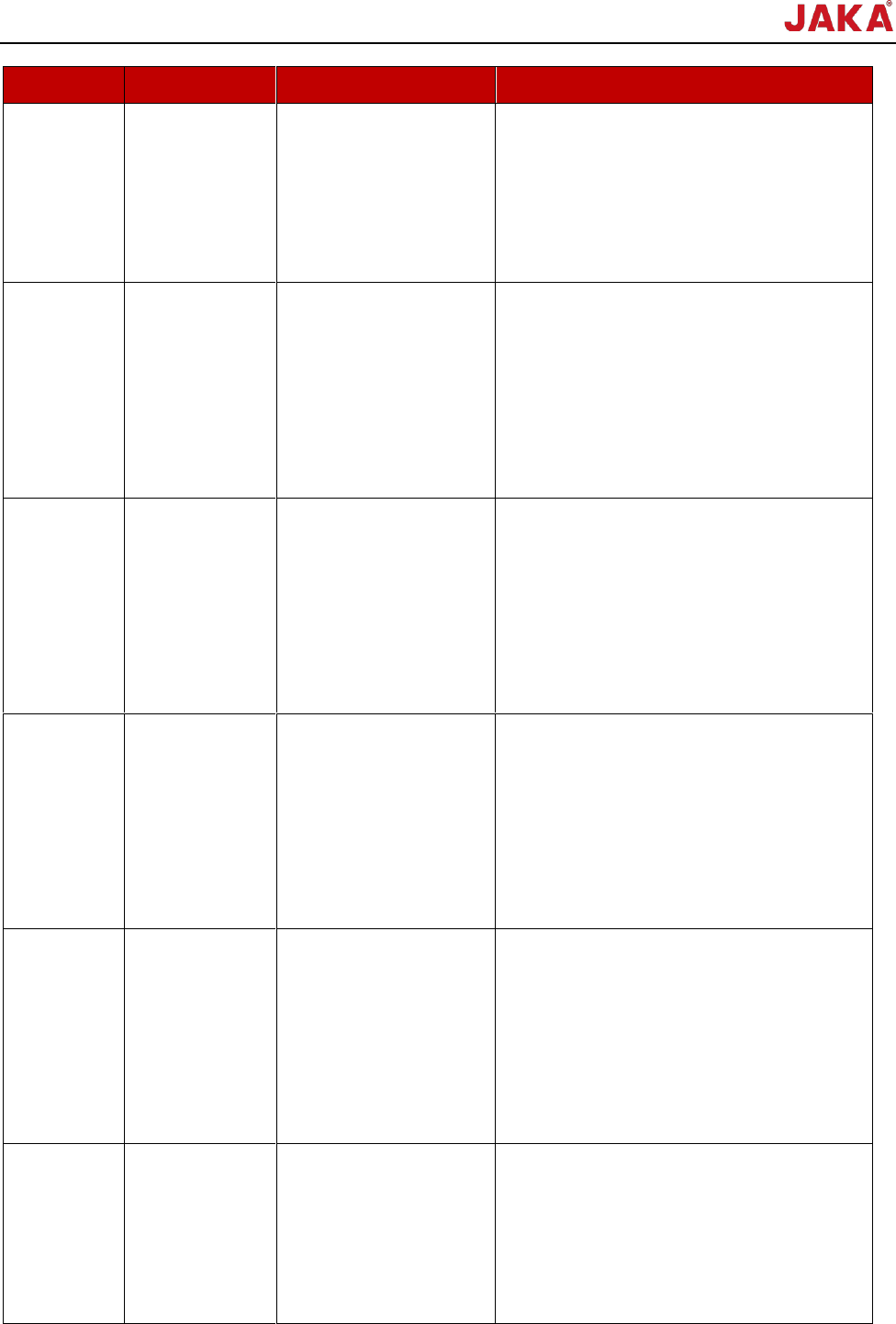
0x153210
关节六伺服过压
检测到母线电压,超出
硬件驱动板的过压阈
值。
1. 请检查机器人负载或运动加速度是否设置
过大,请尝试降低运行工况使用。
2. 请尝试检查电控柜泄放板是否异常。
3. 请联系节卡技术服务人员,协助检查驱动
板硬件是否异常。
0x104310
关节一伺服过温
检测到驱动板上的温
度,超出硬件驱动板的
过温阈值。
1. 请检查当前机器人使用环境温度是否超出
机器人使用温度范围。
2. 请检查关节外表面温度是否大于 50℃,
若大于 50℃,请降低使用工况。
3. 请联系节卡技术服务人员进行检查关节驱
动板或关节减速机是否存在异常。
0x114310
关节二伺服过温
检测到驱动板上的温
度,超出硬件驱动板的
过温阈值。
1. 请检查当前机器人使用环境温度是否超出
机器人使用温度范围。
2. 请检查关节外表面温度是否大于 50℃,
若大于 50℃,请降低使用工况。
3. 请联系节卡技术服务人员进行检查关节驱
动板或关节减速机是否存在异常。
0x124310
关节三伺服过温
检测到驱动板上的温
度,超出硬件驱动板的
过温阈值。
1. 请检查当前机器人使用环境温度是否超出
机器人使用温度范围。
2. 请检查关节外表面温度是否大于 50℃,
若大于 50℃,请降低使用工况。
3. 请联系节卡技术服务人员进行检查关节驱
动板或关节减速机是否存在异常。
0x134310
关节四伺服过温
检测到驱动板上的温
度,超出硬件驱动板的
过温阈值。
1. 请检查当前机器人使用环境温度是否超出
机器人使用温度范围。
2. 请检查关节外表面温度是否大于 50℃,
若大于 50℃,请降低使用工况。
3. 请联系节卡技术服务人员进行检查关节驱
动板或关节减速机是否存在异常。
0x144310
关节五伺服过温
检测到驱动板上的温
度,超出硬件驱动板的
过温阈值。
1. 请检查当前机器人使用环境温度是否超出
机器人使用温度范围。
2. 请检查关节外表面温度是否大于 50℃,
若大于 50℃,请降低使用工况。
3. 请联系节卡技术服务人员进行检查关节驱