JAKA 服务手册-zh-V3.1_20231017_20240108182934A001.pdf - 第21页
文档版本: 3.1 21 / 201 节卡服务手册 关 节 螺 栓 : 输出侧朝右,以水平轴线为基 准,水平轴线右下侧标为 1 号螺栓,顺时 针标记全部螺栓。 静止关节小端螺栓(分体式小臂) : 大端朝 向右侧,以水平轴线右下角为 1 号螺栓, 顺时针标记全部螺栓。 静 止 关 节 或 一 体 式 小 臂 大 端 螺 栓 : 小端朝 向右侧,以水平轴线右下角为 1 号螺栓, 顺时针标记全部螺栓。 2 ) 螺栓拧紧 A. 螺栓总 数为 1…
文档版本:3.1 20 / 201 节卡服务手册
六关节—末端法兰
外六角螺栓+组合垫片
M4×18mm*12
7mm
5.4N·m
五关节—六关节
外六角螺栓+组合垫片
M4×18mm*8(B);M4×
16mm*4(A)
7mm
5.4N·m
四关节—五关节
外六角螺栓+组合垫片
M4×18mm*8(B);M4×
16mm*4(A)
7mm
5.4N·m
小管臂—四关节
外六角螺栓+组合垫片
M4×18mm*8(B);M4×
16mm*4(A)
7mm
5.4N·m
静止关节—小管臂
外六角螺栓全螺纹
M4×25mm*12
垫片 4×8×1*12
7mm
5.4N·m
三关节—静止关节
外六角螺栓+组合垫片
M6×20mm*10
10mm
15.6N·m
大管臂—三关节
外六角螺栓+组合垫片
M6×25mm*6(B);M6×
20mm*4(A)
10mm
15.6N·m*6
10N·m*4
二关节—大管臂
外六角螺栓+组合垫片
M8×25mm*10
14mm
25N·m
一关节—二关节
外六角螺栓+组合垫片
M8×25mm*10
14mm
25N·m
底座—一关节
外六角螺栓+组合垫片
M8×25mm*10
14mm
25N·m
2.2.2.2 螺栓紧固顺序
1) 螺栓标号

文档版本:3.1 21 / 201 节卡服务手册
关节螺栓:输出侧朝右,以水平轴线为基
准,水平轴线右下侧标为 1 号螺栓,顺时
针标记全部螺栓。
静止关节小端螺栓(分体式小臂):大端朝
向右侧,以水平轴线右下角为 1 号螺栓,
顺时针标记全部螺栓。
静止关节或一体式小臂大端螺栓:小端朝
向右侧,以水平轴线右下角为 1 号螺栓,
顺时针标记全部螺栓。
2) 螺栓拧紧
A. 螺栓总数为 12 时,首先按照 1-7-6-12-3-9-10-4-2-8-11-5 顺序预锁紧至目标力矩的 50%,再按照同样顺
序锁紧至目标力矩。
B. 螺栓总数为 10 时,首先按照 1-6-5-10-3-8-2-7-9-4 顺序预锁紧至目标力矩的 50%,再按照同样顺序锁紧
至目标力矩。
C. 螺栓总数为 8 时,首先按照 1-5-4-8-2-6-7-3 顺序预锁紧至目标力矩的 50%,再按照同样顺序锁紧至目
标力矩。
2.2.3 机器人关节更换
为简化描述,便于理解,本节中所提到的“更换部件”为需要更换及更换后的关节;“连接部件”为与更
换的关节相连接的关节或管臂。
注:关节更换涉及更换关节的两端的拆卸与安装,以下步骤以其中一端为例,另一端步骤相同。
2.2.3.1 关节拆卸
文档版本:3.1 22 / 201 节卡服务手册
1. 保持手部干燥并佩戴防静电手环;
2. 断开控制柜电源;
3. 移动机器人至一个便于拆卸的位置,如有必要,从工作单元上拆下整个机械手臂,并将其放在固定工
作台面上;
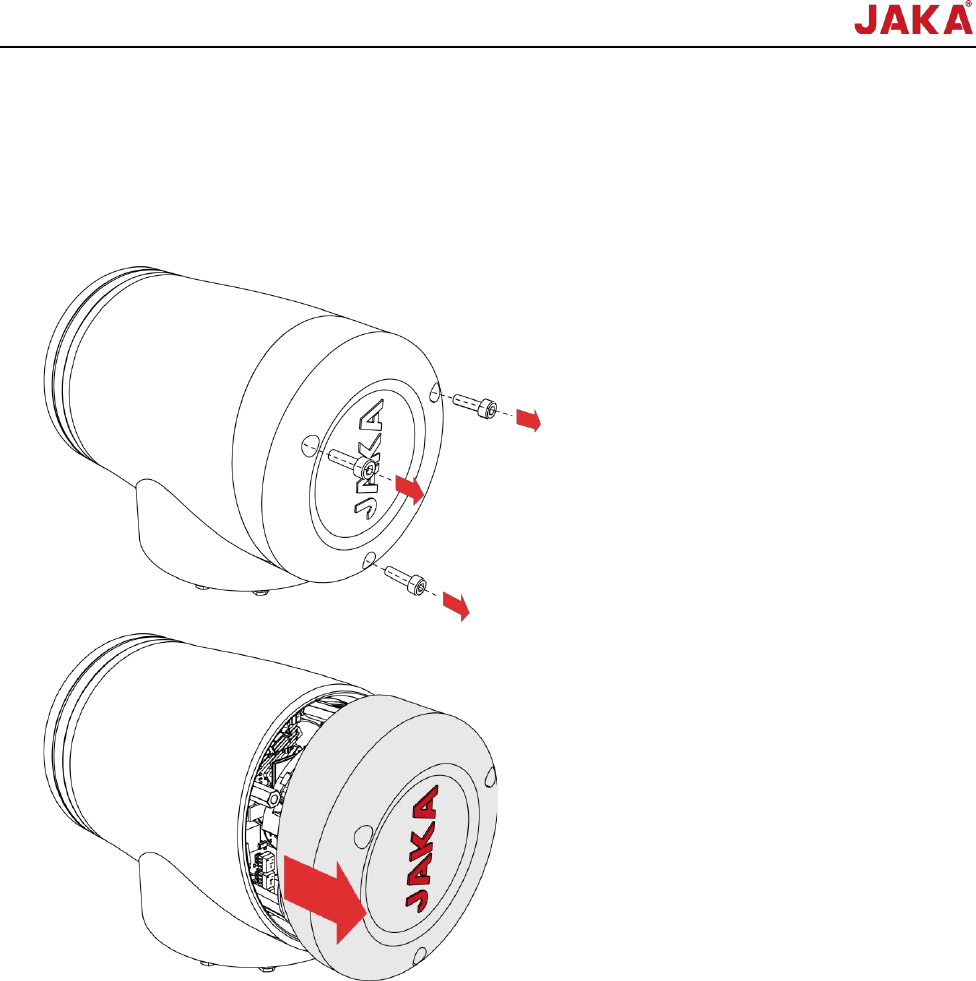
4. 使用内六角扳手拆下关节的后盖;
5. 使用斜口钳将线束上的扎带取下;
6. 使用镊子将连接关节的电源线(红色:48V DC;黑色:GND)及通讯线(黄绿色的双绞线)取下。
拆卸关节时只需取下穿过此关节的连接线;
机器人驱动板存在两种类型,接口定义如下:
a. Pro 16 关节 1、关节 2 驱动板