JAKA 服务手册-zh-V3.1_20231017_20240108182934A001.pdf - 第23页
文档版本: 3.1 23 / 201 节卡服务手册 b. 其他关 节驱动板 注: ( 1 ) 不同关节驱动板上的接 口位置略有不同,图 片仅供参考。 ( 2 ) 关节电源线需用镊子夹 紧透明卡扣后再小心 拔出。 1. 48VDC 接口 2. GND 接口 3. 通讯线 接口 4. 拨码开关 5. 电磁铁接口
文档版本:3.1 22 / 201 节卡服务手册
1. 保持手部干燥并佩戴防静电手环;
2. 断开控制柜电源;
3. 移动机器人至一个便于拆卸的位置,如有必要,从工作单元上拆下整个机械手臂,并将其放在固定工
作台面上;
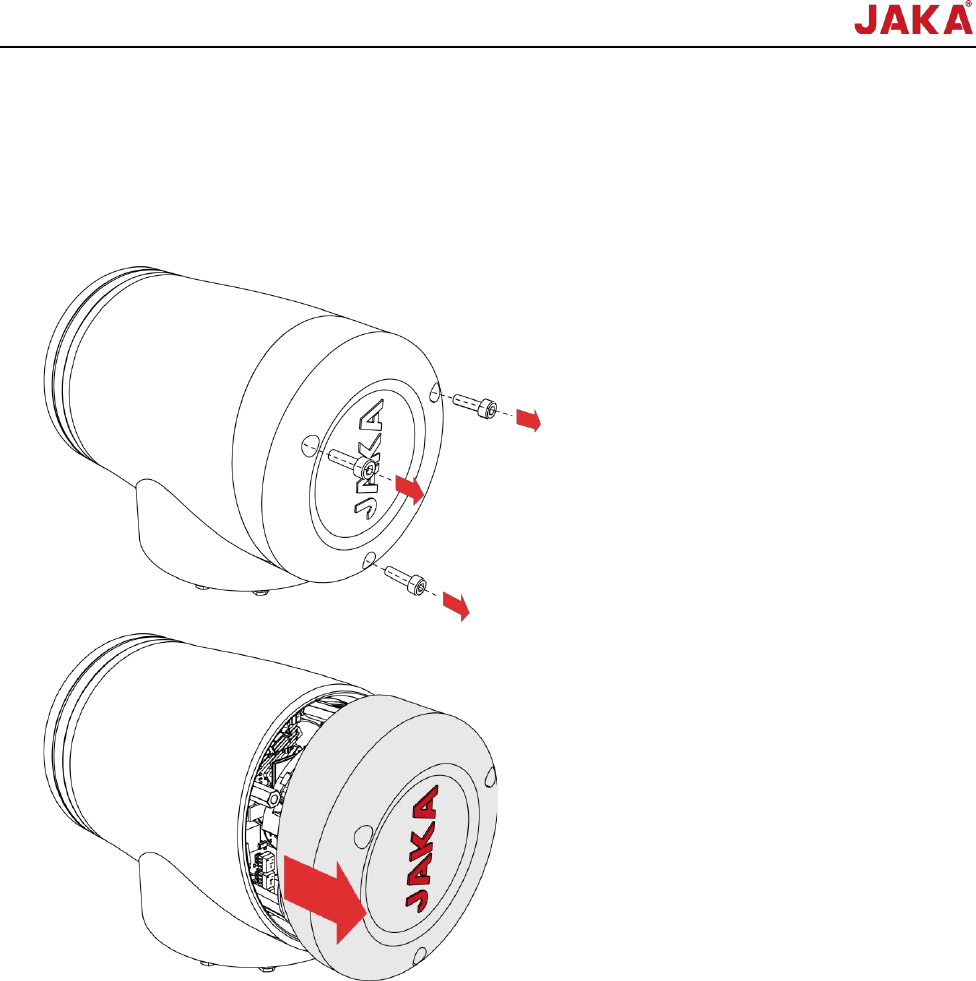
4. 使用内六角扳手拆下关节的后盖;
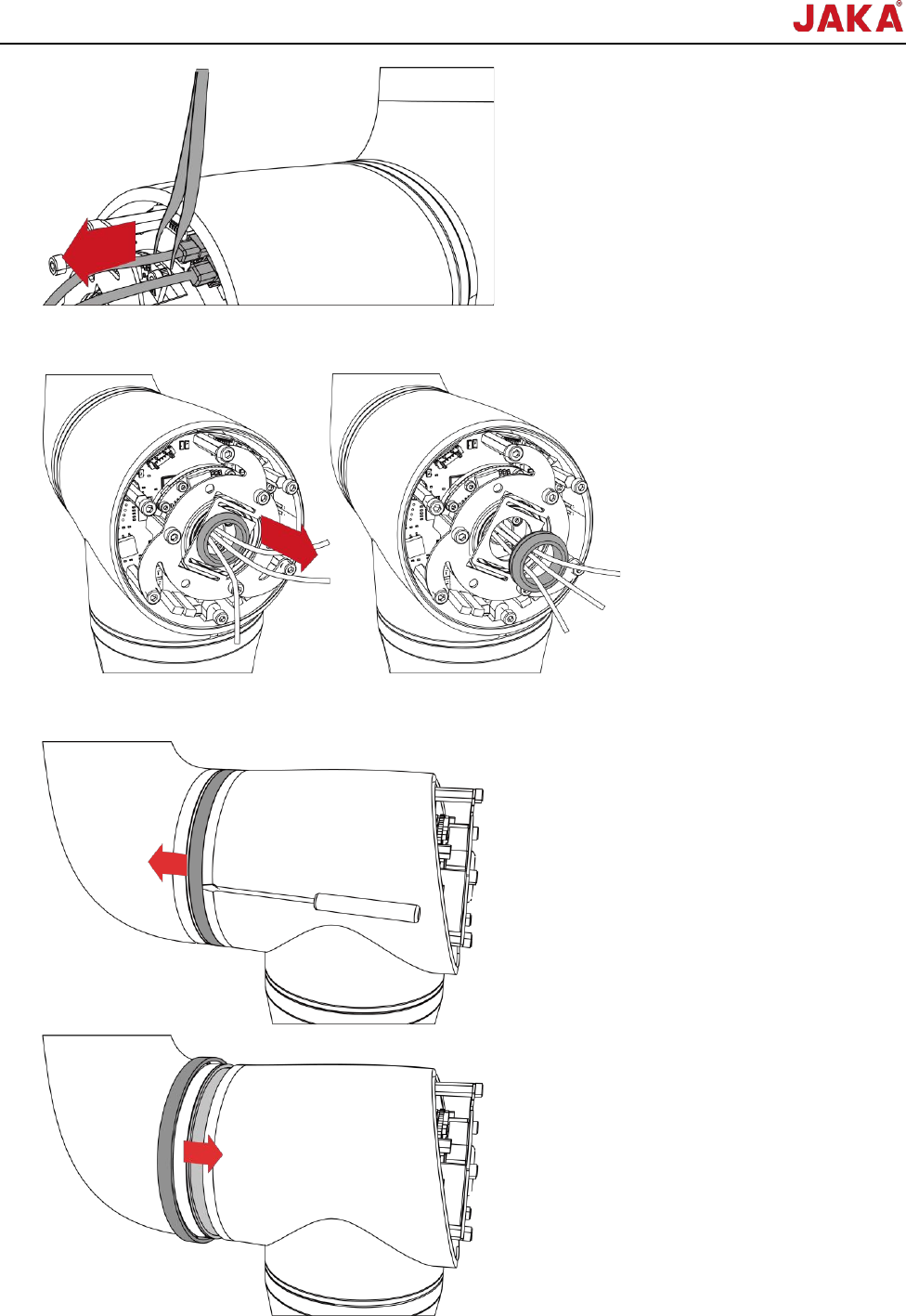
5. 使用斜口钳将线束上的扎带取下;
6. 使用镊子将连接关节的电源线(红色:48V DC;黑色:GND)及通讯线(黄绿色的双绞线)取下。
拆卸关节时只需取下穿过此关节的连接线;
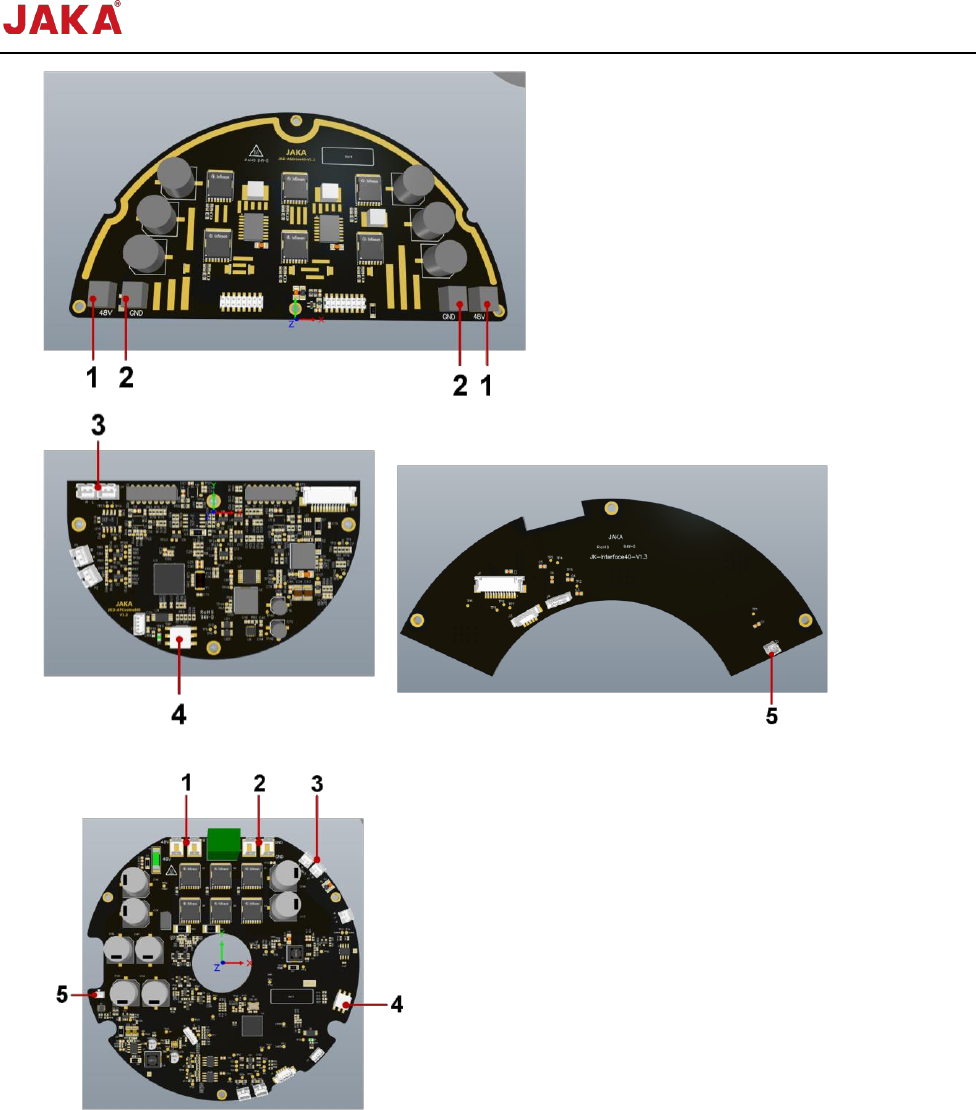
机器人驱动板存在两种类型,接口定义如下:
a. Pro 16 关节 1、关节 2 驱动板
文档版本:3.1 23 / 201 节卡服务手册
b. 其他关节驱动板
注:
(1) 不同关节驱动板上的接口位置略有不同,图片仅供参考。
(2) 关节电源线需用镊子夹紧透明卡扣后再小心拔出。
1. 48VDC 接口
2. GND 接口
3. 通讯线接口
4. 拨码开关
5. 电磁铁接口
文档版本:3.1 24 / 201 节卡服务手册
7. 拆下线缆固定件;
8. 使用一字螺丝刀将橡胶密封圈移至关节外毂上;滑动灰色塑料耐磨圈,使固定螺栓露出。