JAKA 服务手册-zh-V3.1_20231017_20240108182934A001.pdf - 第35页
文档版本: 3.1 35 / 201 节卡服务手册 升级过 程中 控制 器 会自动 打 开电源 , APP 界面 会弹 出升 级进 度窗口 ,等 待 升级 完成 (约 几分钟 时间 ) , 控 制器自动重启,升级完 成。 2.2.5 关节校准 在更换关节后,应对新 关节进行关节校准操 作。 关节校 准需要 使机 器人处 于 校准姿 态,在 更换 关节之 前, 将机器 人移至 校准 姿态; 如果 机器人 已无 法使能 , 参考 2.1.1…
文档版本:3.1 34 / 201 节卡服务手册
2.2.4.2 升级伺服
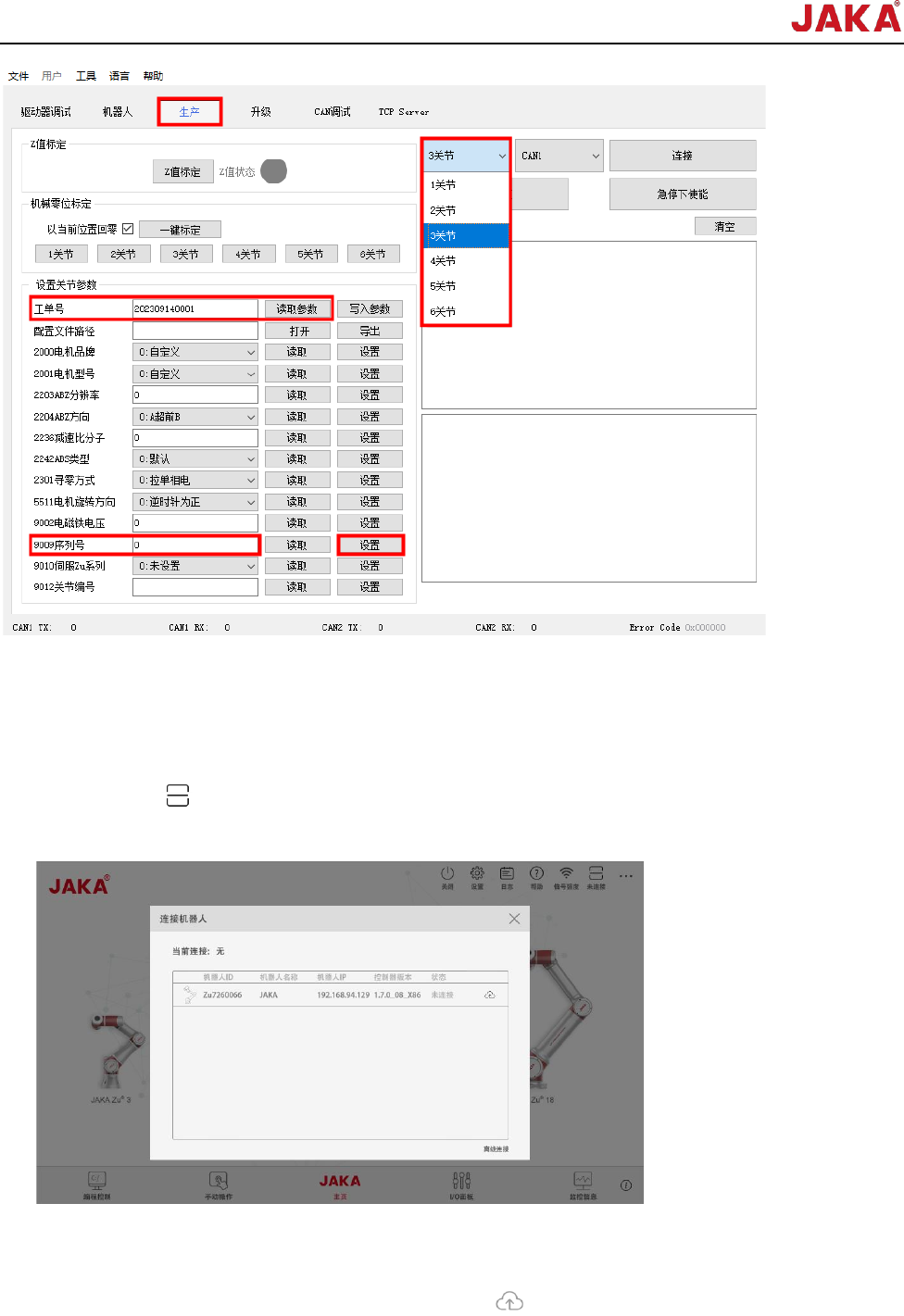
1. 连接机器人
1)将带有 JAKA Zu APP 的设备连接到控制柜相同的局域网内;
2)打开设备中的 JAKA Zu APP;
3)点击右上角 找到对应的机器人进行连接(CAB V2.1 控制柜自带 Wi-Fi 模块,使用手柄启动控制柜
后,在设备中可以搜索名称为控制柜编号的 Wi-Fi 并连接,用户也可以自行选配路由器)。
2. 升级伺服
点击【设置】→【系统设置】→【版本升级】进入伺服升级界面,点击“请选择文件”的白框,上传伺服
升级包(升级包的名称不可修改,必须保持原文件名),点击 图标上传升级包;

文档版本:3.1 36 / 201 节卡服务手册
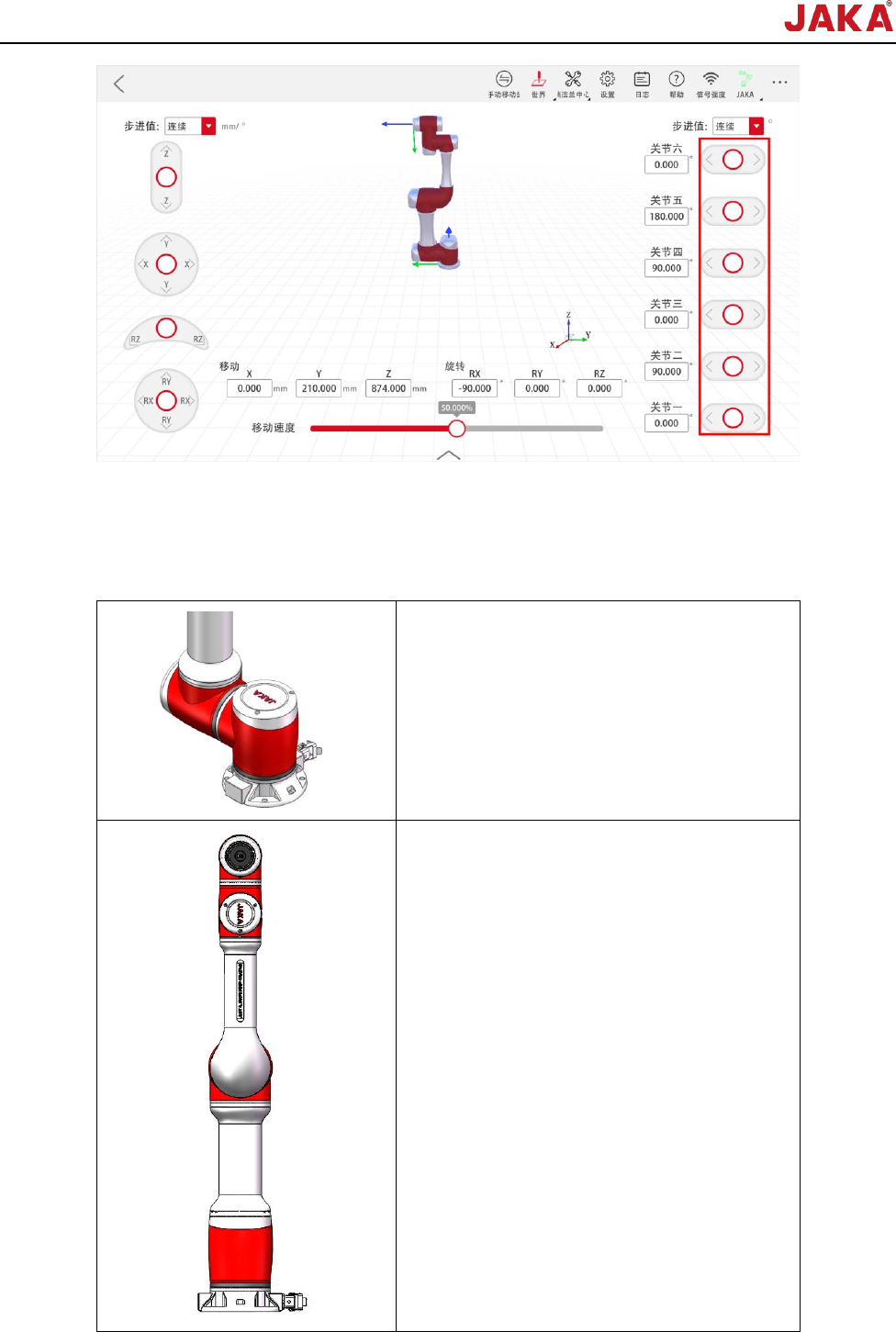
注意:若更换的关节在手动操作出现报错“超过软限位”,则按照步骤 4 先将该关节校准一次,再回到
“手动操作”模式下,继续手动调整至校准姿态;
各个关节的校准姿态如下表:
调整关节 1 位置,使得关节 2 水平线与航空插头
之间角度为 90°,且在航空插头的右侧。
在底座水平的状态下:
与关节 2 相连接的大管臂呈竖直向上姿态;
与关节 3 相连接的小管臂呈竖直向上姿态。