JAKA 服务手册-zh-V3.1_20231017_20240108182934A001.pdf - 第36页
文档版本: 3.1 36 / 201 节卡服务手册 注意: 若更 换的关 节在 手 动操 作出现 报错 “超 过软限 位 ” ,则 按照步 骤 4 先 将该 关节 校准一 次, 再回 到 “手动操作”模式下, 继续手动调整至校准 姿态; 各个关节的校准姿态如 下表: 调整关节 1 位置,使得关 节 2 水平线与航空插头 之间角度为 90 °,且在航 空插头的右侧。 在底座水平的状态下: 与关节 2 相连接的大管臂呈 竖直向上姿态; 与关…

文档版本:3.1 36 / 201 节卡服务手册
注意:若更换的关节在手动操作出现报错“超过软限位”,则按照步骤 4 先将该关节校准一次,再回到
“手动操作”模式下,继续手动调整至校准姿态;
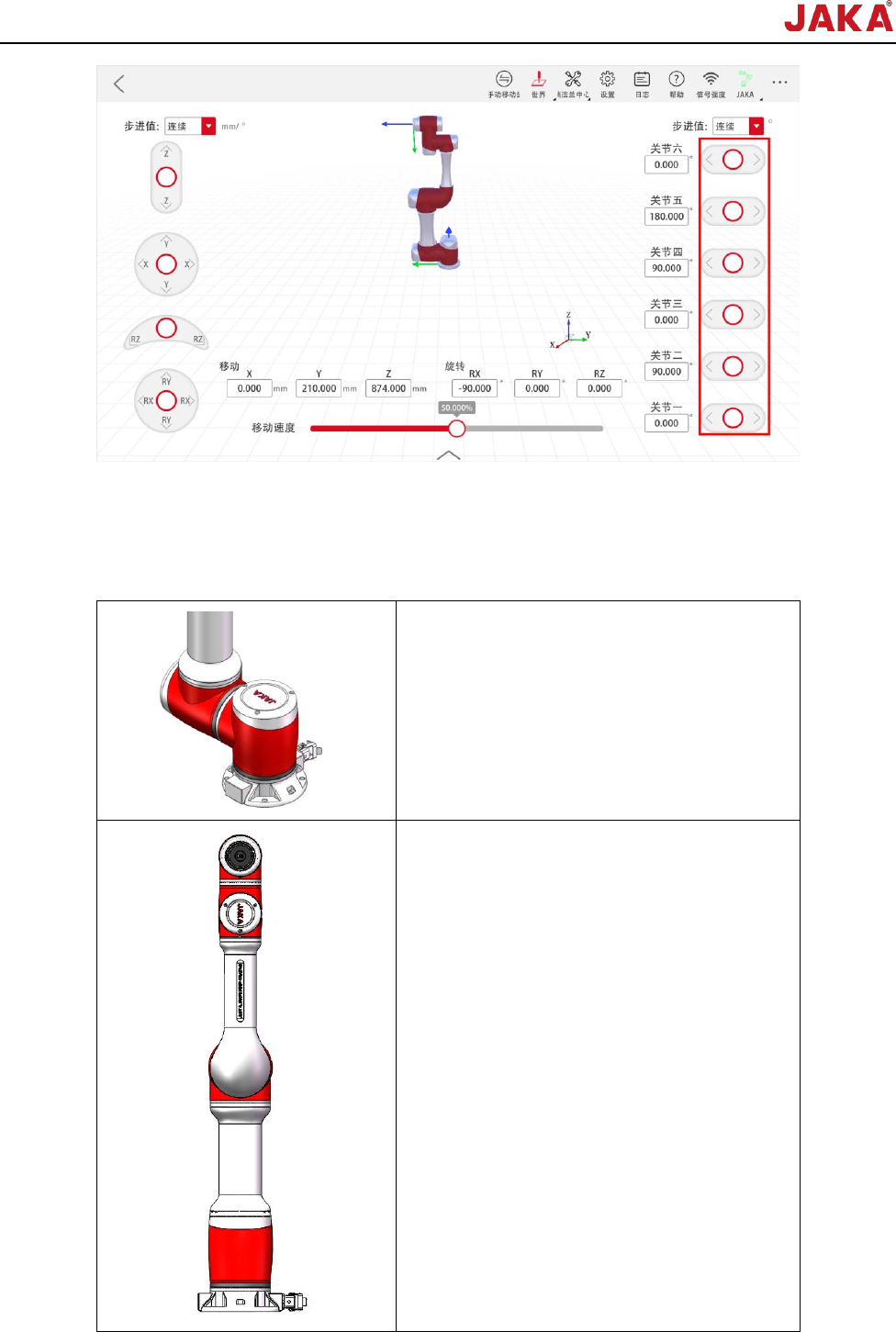
各个关节的校准姿态如下表:
调整关节 1 位置,使得关节 2 水平线与航空插头
之间角度为 90°,且在航空插头的右侧。
在底座水平的状态下:
与关节 2 相连接的大管臂呈竖直向上姿态;
与关节 3 相连接的小管臂呈竖直向上姿态。
文档版本:3.1 37 / 201 节卡服务手册
关节 4 位置:
使关节 5 轴线处于竖直姿态;
关节 5 位置:
使关节 6 轴线与关节 4 轴线平行。
关节 6 位置:
使末端法兰上 TIO 接口朝正上方。
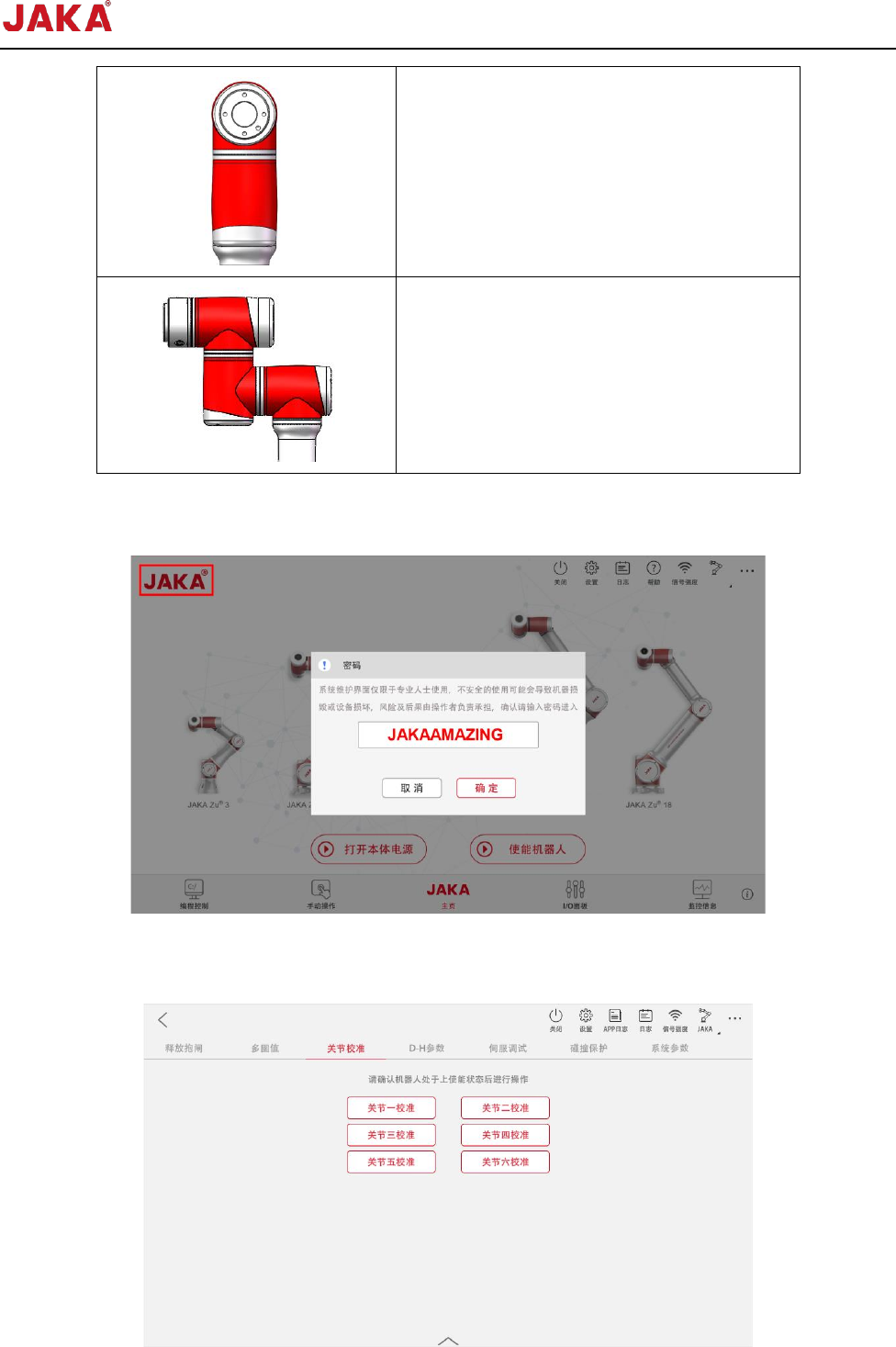
3. 将机器人移至关节校准姿态后,返回首页,连续点击页面左上角“JAKA”,输入密码,点击“确
认”,进入系统维护界面;(注:密码是 JAKAAMAZING)
4. 点击【关节校准】,选择需要校准的关节即对该关节进行校准;校准后点击左上角返回标识,退出当
前页面;