RS-1_维修调整要领书.pdf - 第14页
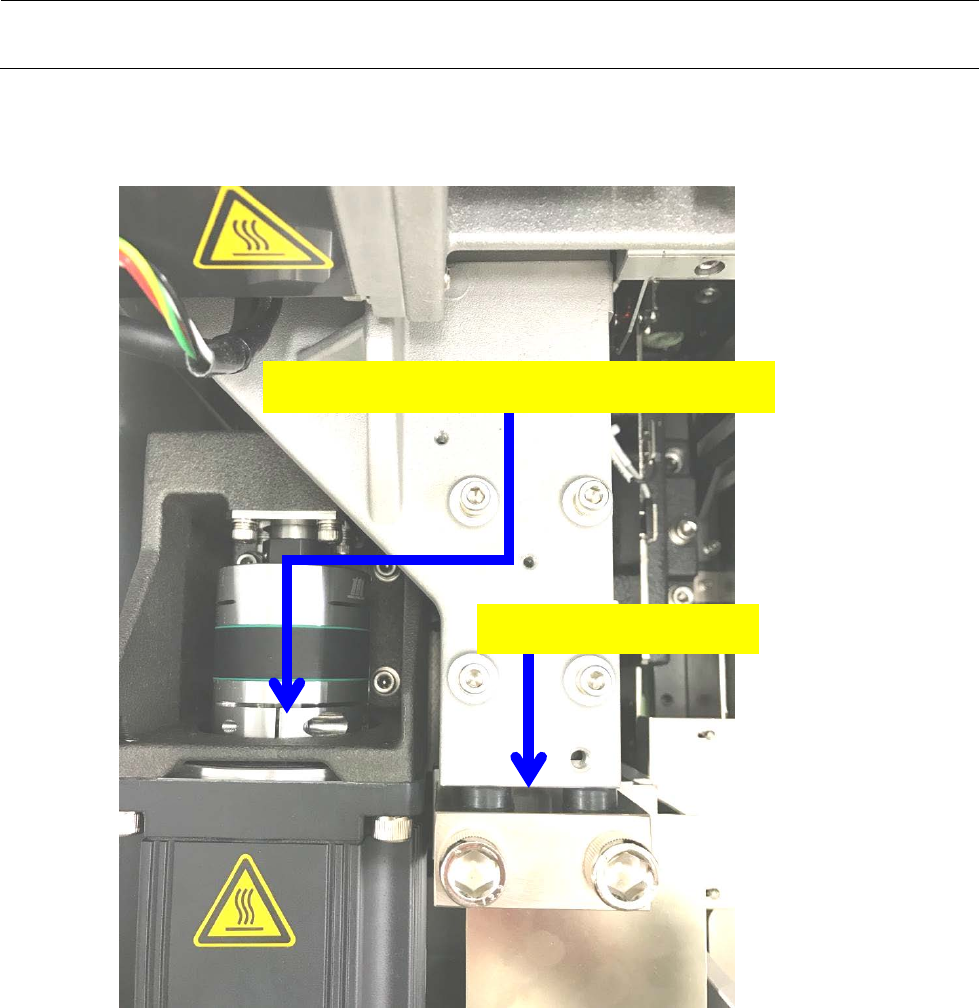
维修调整要领书 1-7 7 ) 机械端移动轴,以检查联接的位置。 ※ 如果这不是以下的状态,请重复 5) 的工作。 ①移 动 X 框到机械 终 端 。 ② 联轴器的 电 机 侧 的下 调 将 检查你面 临 的上 侧 。 图 1- 1 - 3 -9
维修调整要领书
1-6
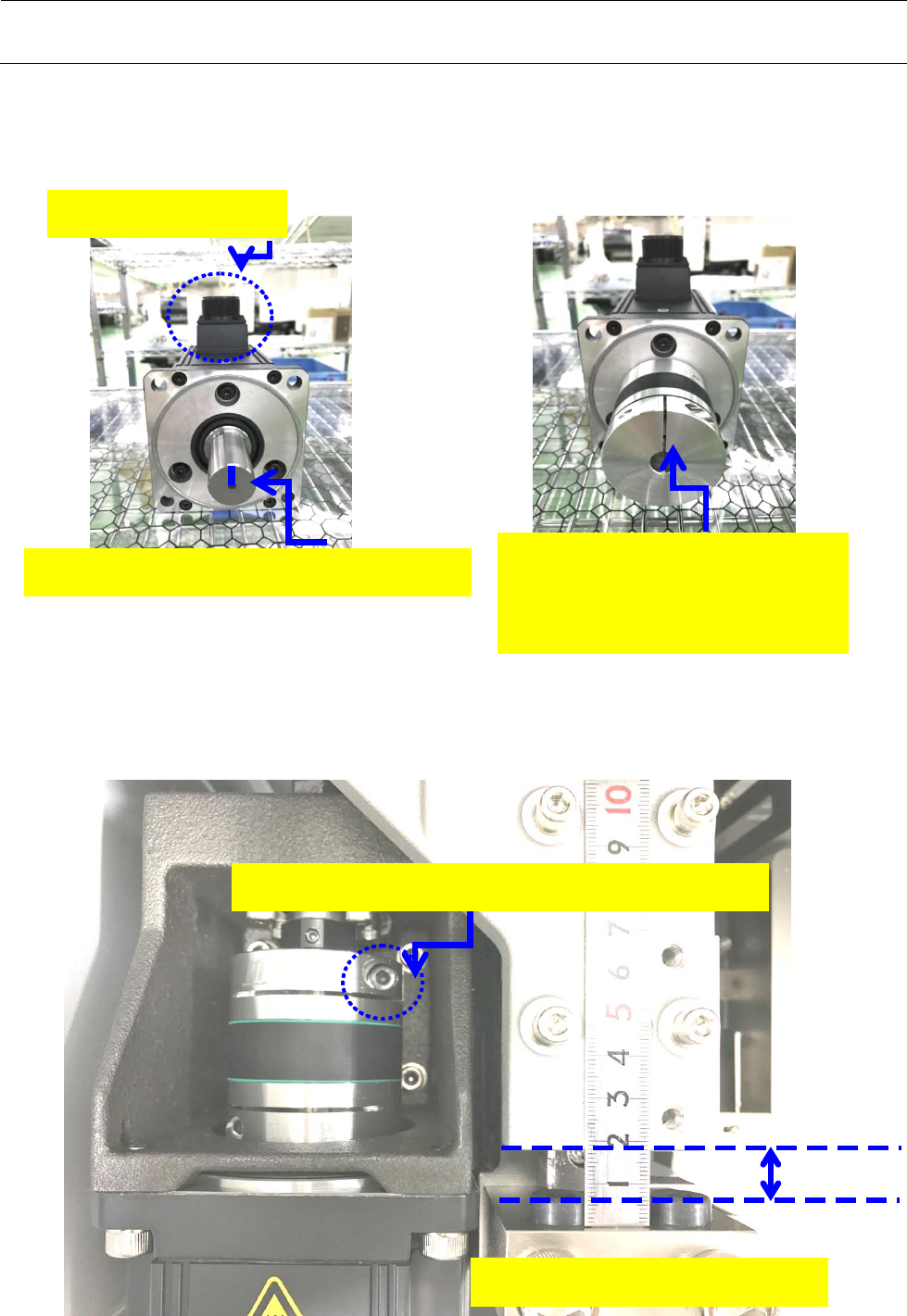
5) 调整电动机的 Z 相。
※ COUPLING 与电动机的空隙为 4mm,COUPLING_Y_螺丝的安装扭矩为 7 Nm。(图 1-1-3-5)
6) 以通过以下方法用于调整电机的安装固定的滚珠丝杠。
图 1-1-3-6
➀上侧的 Y 轴马达连接
②旋转马达轴与 Z 相的标记的上侧(相位 0)
③联接的滚珠丝杠侧的切口
以固定联接来的上侧的电动机轴
※注意耦合和电机之间的间隙
图 1-1-3-7
②转动滚珠丝杠侧将被固定在上部位置的联接固定螺钉
①从机械端移动 X 框至 10mm 的位置
图 1-1-3-8
维修调整要领书
1-7
7) 机械端移动轴,以检查联接的位置。
※ 如果这不是以下的状态,请重复 5)的工作。
①移动 X 框到机械终端。
②联轴器的电机侧的下调将检查你面临的上侧。
图 1-1-3-9
维修调整要领书
1-8
1-2 极限传感器、原点附近传感器的更换
1) 只更换传感器的时候,没有必要调整位置。
2) 支架也一起更换的时候,需要调整位置。
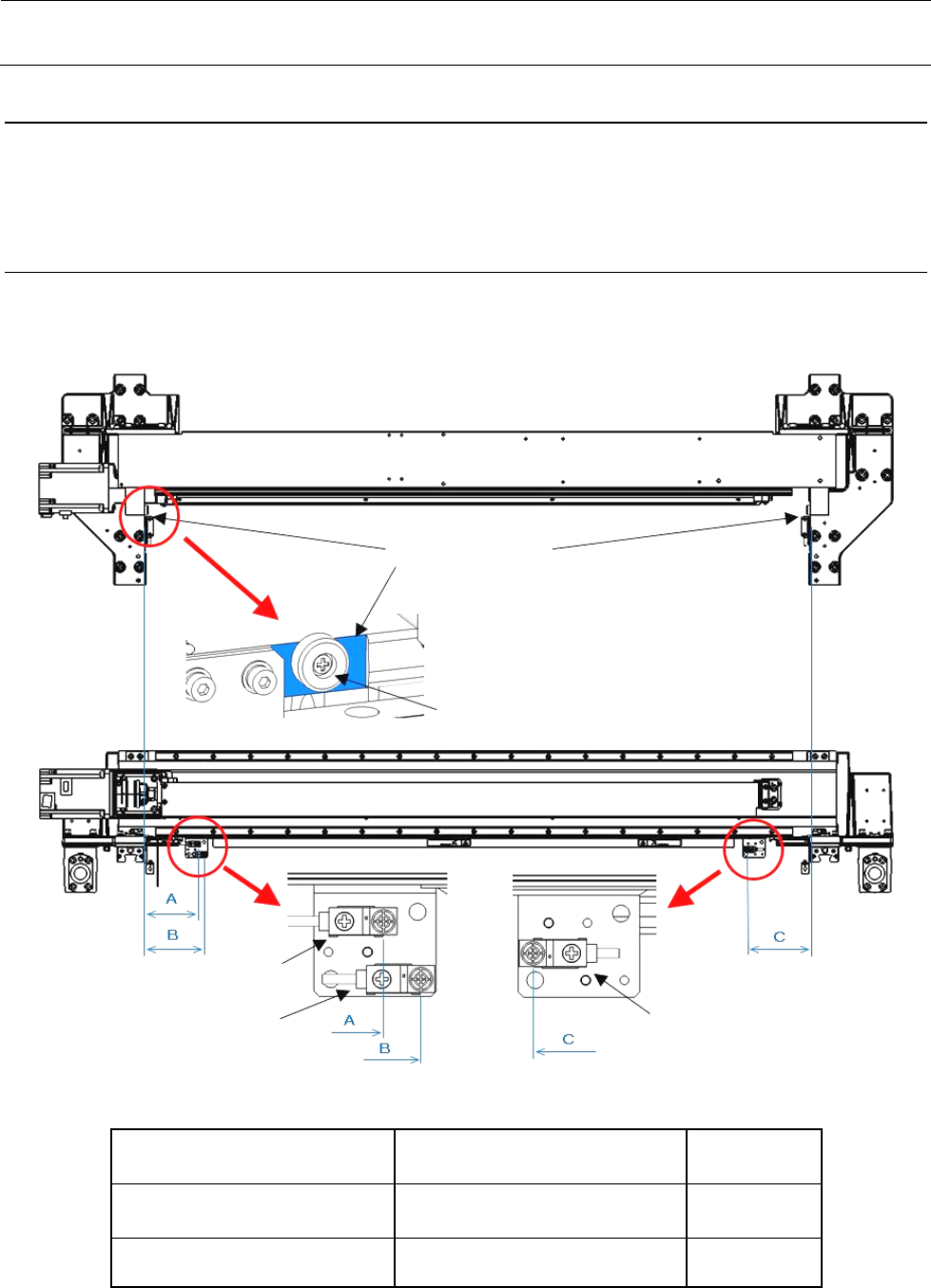
1-2-1 X 轴极限传感器、X 轴原点附近传感器的更换
1) 拧松固定 X 极限传感器支架的螺丝,按照下图的 X 架端 L、R 的距离进行固定。(图 1-2-1-1)
图 1-2-1-1 极限传感器、原点附近传感器的更换
左侧 (X 负侧极限传感器)
X 架端 L 的止动橡胶安装面和传感器
中心的距离: A
85.7mm
中央 (X 原点附近传感器)
X 架端 L 的止动橡胶安装面和传感器
中心的距离: B
96.7mm
右侧 (X 正侧极限传感器)
X
架端
R
的止动橡胶安装面和传感
器中心的距离
:C
104.7mm
止动橡胶粘贴面
止动橡胶
X
负侧极限传感器
X
原点附近传感器
X正侧极限传感器