KE-2070-2080-2080R 操作手册2 Rev00.pdf - 第262页
操作手册Ⅱ Rev02 4-31 4-2-2-4 设置生产的功能 2 选项 设置生产时的操作。 图 4-9 生产的功能 2 选项 内容 序号 项目 状态 运行及详细内容 设置在循环停止时是否搬出基板。 在生产中按下单循环键时, 生产一块基板后不搬出 基板, 留在中心站上。 ·释放基板并暂停。 ·按<START>键,再进行生产。 1 循环停止时不 要搬出基板 把基板排出到后道工序后结束生产。 设置基板搬入时是否用激光检查脏污 …
操作手册Ⅱ Rev02
4-30
设置在所有电路识别出坏板标记时,是否中断生产。
7
所有电路都是
坏板标记时结
束生产
即使生产未达到预定数量,也要结束生产。因为可以推断是“坏板标
记位置信息错误”、“传感器的调整不良或故障”等出现异常。
设置安装吸嘴时是否执行方向检测。
8
安装吸嘴时进
行方向检测
T 型等吸嘴需要对准元件的角度吸取,可在安装吸嘴时检测吸嘴的安
装方向,对吸取、识别、粘贴元件时的吸嘴安装角度进行校正。但仅
对 INI 文件定义的吸嘴有效。使之有效时,要加算安装吸嘴时识别吸
嘴的时间。
设置在开始生产前,是否对 IC 贴片头吸嘴分配进行检查。
9
开始生产前 IC
贴片头的吸嘴安
装检查(仅 2080)
在开始生产前,对右 IC 贴片头吸嘴分配进行检查。
10
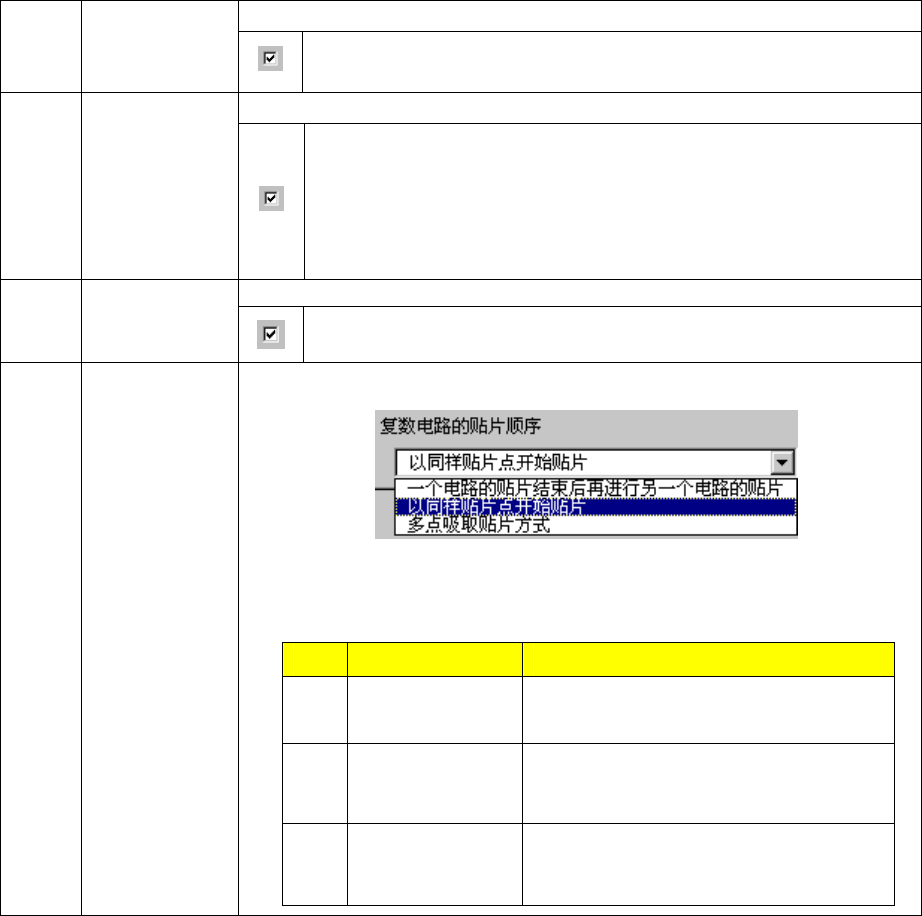
复数电路的贴
片顺序
指定要使用的贴片顺序。
图 4-8 多电路的贴片顺序图
多电路的贴片顺序的选项及概要
序号 选项 概要
1
一个电路的贴片
结束后再进行另
一个电路的贴片
在矩阵或非矩阵上,对每一电路依次贴
片,逐个电路完成贴片。
2
以同样贴片点开
始贴片
按照贴片数据的顺序,将第 1 号元件贴片
在各电路上,然后将第 2 号元件按各电路
上贴片数据的顺序贴片在各电路上。
3
多点吸取贴片方
式
对 可一次吸取的元件(吸嘴数)配对贴片
在各电路上。可加快生产节拍,因此通常
推荐此种模式。
操作手册Ⅱ Rev02
4-31
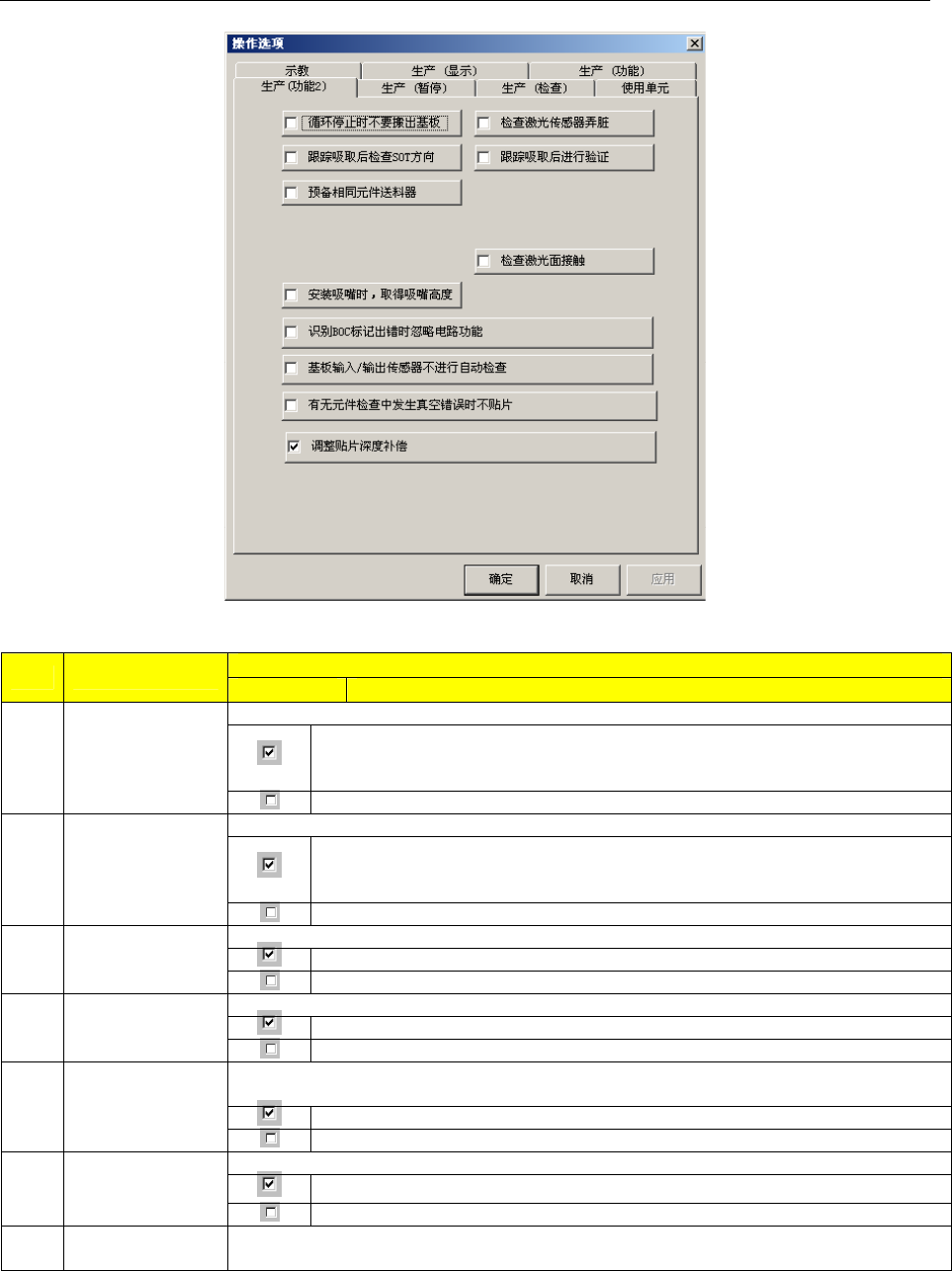
4-2-2-4 设置生产的功能 2 选项
设置生产时的操作。
图 4-9 生产的功能 2 选项
内容
序号 项目
状态 运行及详细内容
设置在循环停止时是否搬出基板。
在生产中按下单循环键时,生产一块基板后不搬出基板,留在中心站上。
·释放基板并暂停。
·按<START>键,再进行生产。
1
循环停止时不
要搬出基板
把基板排出到后道工序后结束生产。
设置基板搬入时是否用激光检查脏污。
搬入基板、移动到等待位置后,进行激光脏污检查。
检测到脏污后,暂停。另外,重启时再检查一次,若还有脏污,则显示
信息询问是检查还是强行继续生产。
2
检查激光传感
器弄脏
不进行激光脏污检查。
设置跟踪吸取位置检查三端子 SOT 元件方向。
跟踪吸取位置后,若是三端子 SOT 元件,则进行方向检查。
3
跟踪贴片后检
查 SOT 方向
不进行跟踪吸取后检查 SOT 方向
设置跟踪吸取后进行验证。
跟踪吸取位置后进行验证检查。
4
跟踪贴片后进行
验证
不进行验证检查。
设置在 IN 缓冲、OUT 缓冲传送动作中发生错误后开始生产时、是否对 IN 缓冲器、
OUT 缓冲上有无基板进行检查。
生产开始时不检查基板。
5
基板输入/输出
传感器不进行
自动检查
生产开始时,如基板残留在传感器之间,则自动启动传感器。
设置按输入顺序生产时预备相同元件送料器。
如有替代送料器,在元件用尽时从替代送料器中吸取元件。
6
预备相同元件
送料器
不预备相同元件送料器。
7
有无元件检查
设置在检查有无元件时对真空检查判定为“无元件”、激光检查判定为“有元件”
的元件进行的贴片动作。
操作手册Ⅱ Rev02
4-32
·吸取时,对真空检查判定为“无元件”、激光检查判定为“有元件”的,
根据元件废弃的设置废弃元件,不进行贴片。
·在贴片前和图像识别前(仅限于图像定心)的真空检查判定为“无元件”
的,不进行激光检查,而根据元件废弃的设置废弃元件,不进行贴片。
中发生真空错
误时不贴片
即使真空检查发生错误,在吸取时、贴片前、图像识别前进行激光检查,
对激光检查判定为有元件的,进行贴片。
生产中若查出电路 BOC 标记错误时,则对该电路不进行元件贴片而继续生产。
设置坏板标记识别后,将优先处理坏板标记识别结果,因此查出 BOC 标记错误后将
跳过该电路,不进行贴片。
识别 BOC 标记出错时,忽略对该电路的贴片。
8
识别 BOC 标记出
错时,忽略电路
功能(不进行电
路贴片)
只作为识别 BOC 标记出错进行正常处理。
设置是否进行激光面接触的检查。
激光面接触检查是指:对供料器第一次供给的元件吸取状态用激光进行 “once”
检查,判定为“接触”时作为元件用完错误处理,以防止激光识别时使旋转的元件
接触了激光面造成伤痕。
检查激光面接触。设置为默认值。
9
检查激光面接
触
不检查激光面接触。
安装吸嘴时用激光测量吸嘴高度。
通过掌握实际测量的吸嘴高度,在识别元件时把握其高度方向位置可以更为准确。
要保证对超薄型元件识别的稳定性,或在识别图像时需在摄像机与元件间保持一定
距离(例如引脚太细、突出部的排列距离很小时),可使用此项功能。
在安装对应 0402 元件(选项)的专用 509 吸嘴时,不管是否设置此项选项,都必
须测量吸嘴高度。
对全部吸嘴,安装时都要测量高度。
10
安装吸嘴时,取
得吸嘴高度
只对 0402 元件专用的 509 吸嘴,安装时要测量高度。
(贴装 0402 元件时,需要对应 0402 元件的选项。)
只有装备了真空泵规格的机器才显示此选项。对于元件尺寸相当于 1005 的元件,
在当生产程序的贴片深度补偿量设置为 0.5mm 的情况下,才可调整实际贴片深度补
偿量为 0.2mm。
将 0.5mm 的贴片深度补偿量调整为 0.2mm。
11
调整贴片深度
补偿
不进行上述调整。
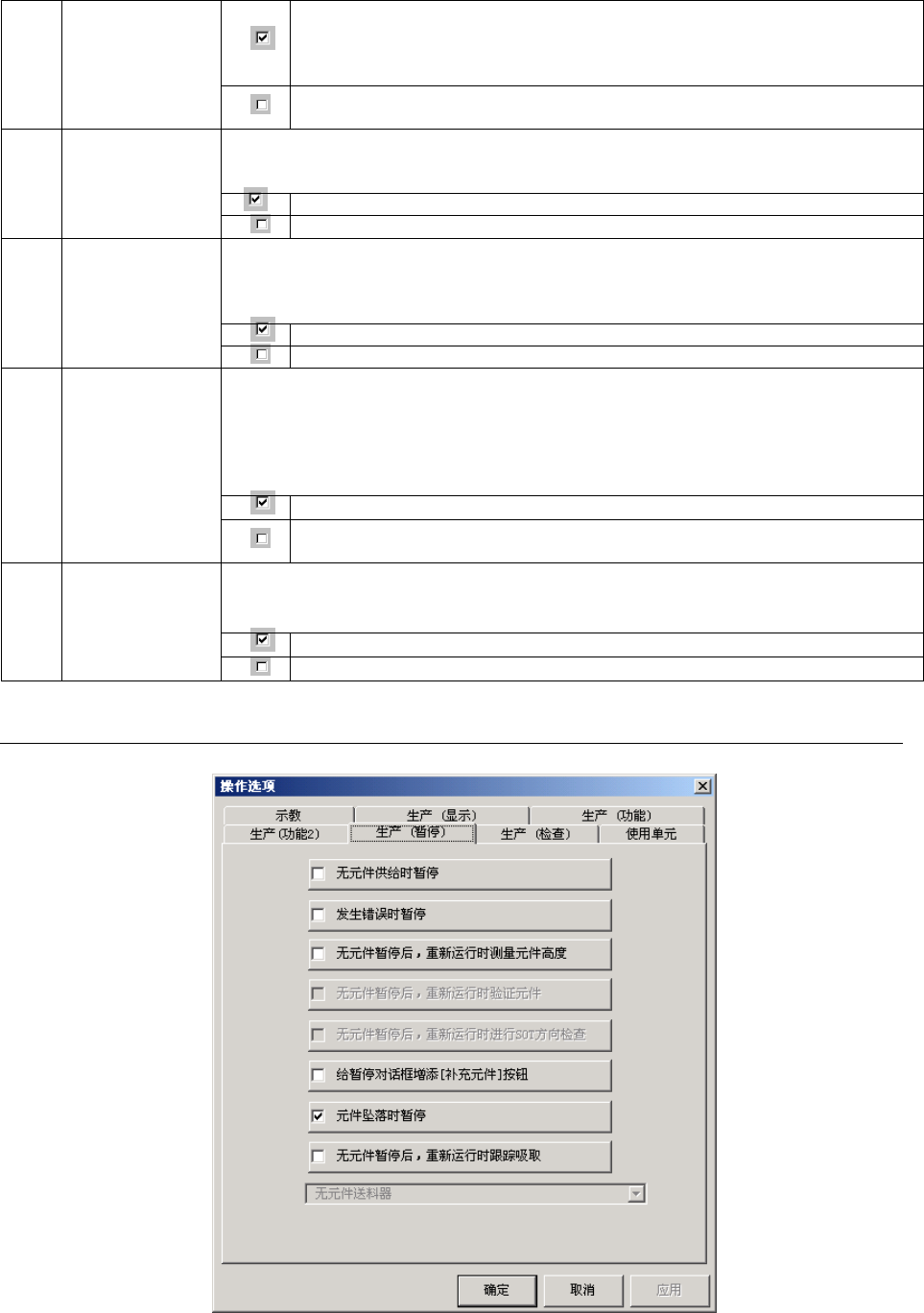
4-2-2-5 生产时的暂停选项设置
设置生产时的动作。
图 4-10 生产时的暂停选项