KE-2070-2080-2080R 操作手册2 Rev00.pdf - 第34页
第 1 章 设备概要 Rev02 1-24 1-6 空运行模式 在不进行生产,为传送控制使基板通过时使用该模式。 从主画面的菜单栏中选择“维护”/“空运行模式”后,显示以下画面。 此时,虽然无需返回原点,但需根据基板的尺寸来调整传送宽度。 即使由于设备的故障而无法返回原点,有时也能使用空运行模式。 此时,为了防止因传感 器的误检测而导致停止,请把贴片头组件移到 离传送 路 线远一些的位置上。(=大约在校准块的上方) 图 1-16 开始空…
第 1 章 设备概要 Rev02
1-23
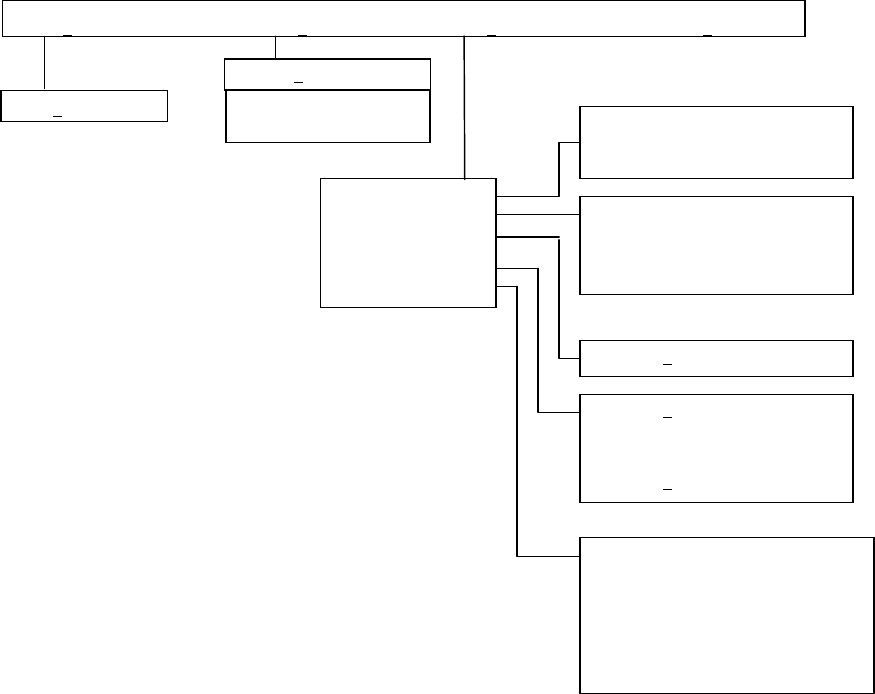
5) 手动控制
文件(F) 显示(V) 控制(C) 帮助(H)
Head (H) >>
基板搬送(C) >>
图像(V) >>
送料装置(F) >>
其他(O) >>
设置值一览表显示(V)
构成图(D) …
Head 控制(H)…
控制 Head 设备 (D)…
激光/传感控制(L)…
个别控制传送(I)…
自动控制传送(A)…
自动调整基板宽度控制(W)…
基板条形码控制…
VCS 控制(V)…
MTC 控制(C)…
MTS 控制(S)…
送料针控制(F)…
DTS 控制(D
)…
退出(X)
状态栏(S)
ATC 控制(A)…
信号灯控制(S)…
元件验证(V)…
校准台控制(C)…
其他传感器(O)…
驱动器情况(D)…
第 1 章 设备概要 Rev02
1-24
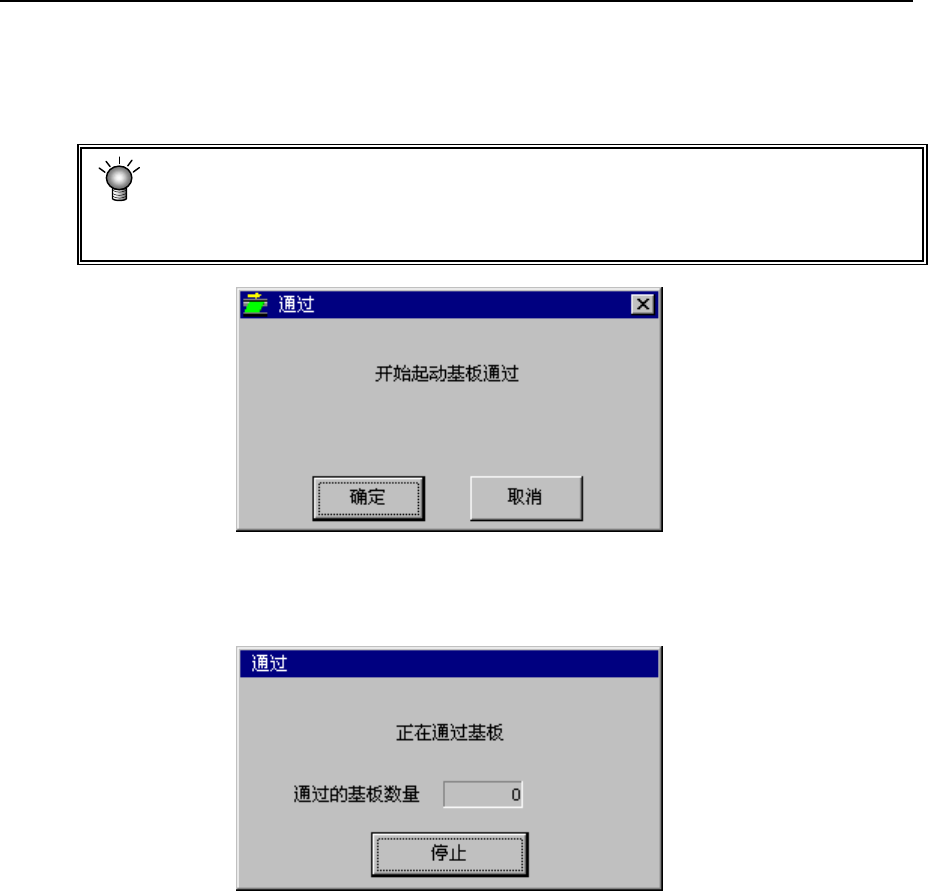
1-6 空运行模式
在不进行生产,为传送控制使基板通过时使用该模式。
从主画面的菜单栏中选择“维护”/“空运行模式”后,显示以下画面。
此时,虽然无需返回原点,但需根据基板的尺寸来调整传送宽度。
即使由于设备的故障而无法返回原点,有时也能使用空运行模式。
此时,为了防止因传感器的误检测而导致停止,请把贴片头组件移到离传送路
线远一些的位置上。(=大约在校准块的上方)
图 1-16 开始空运行(通过)模式
单击“确定”后,显示如下画面,传送传感器检测到有基板到来时,传送带开始转动。
图 1-17 运行空运行(通过)模式中
单击“停止”后,空运行模式停止。
第 1 章 设备概要 Rev02
1-25
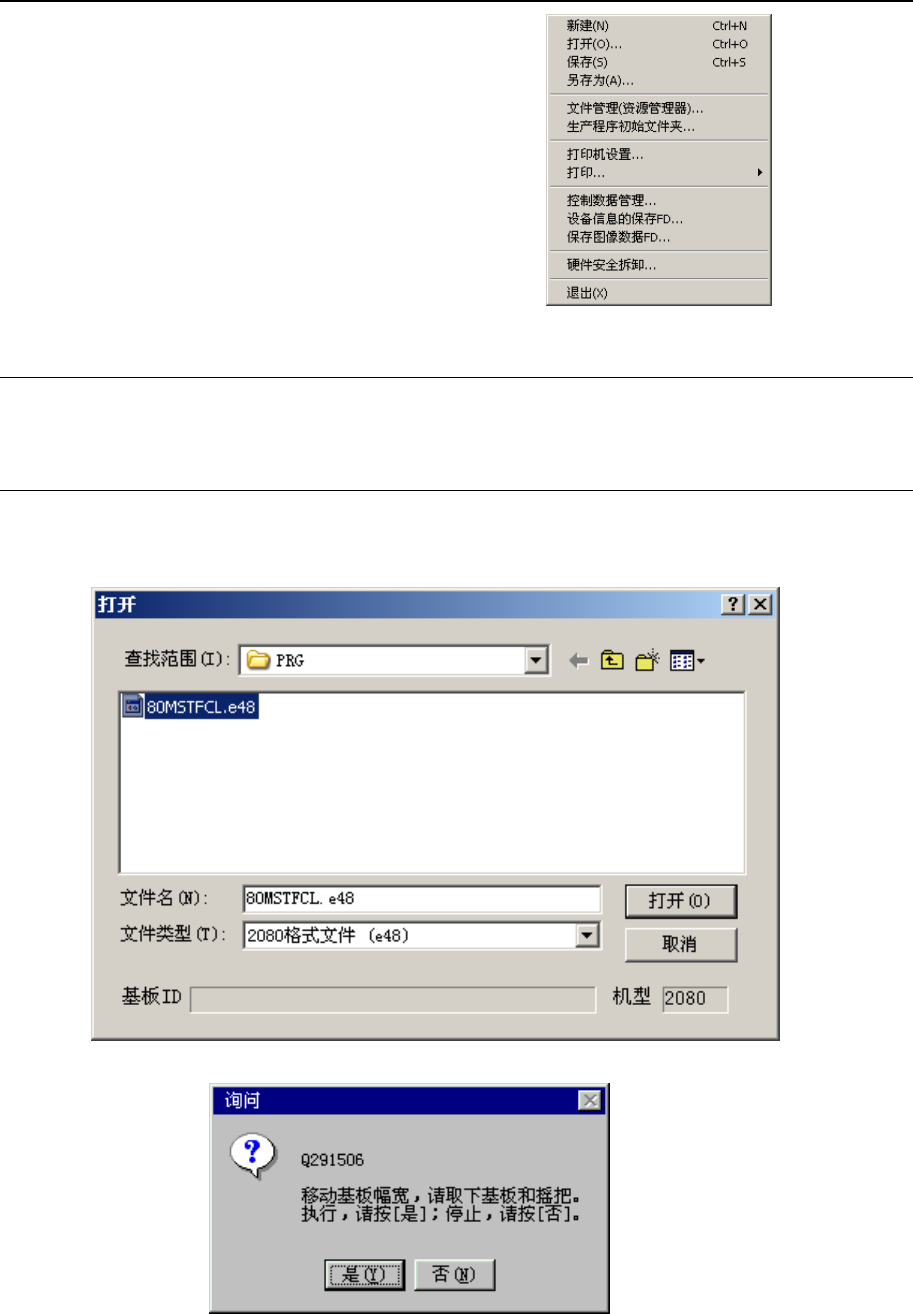
1-7 文件操作
进行生产时,需打开生产程序文件。
本章就桌面画面的文件各操作方法进行说明。
1-7-1 新建
制作新的程序时,请选择此项。
1-7-2 打开(读入文件)
读入已经制作好的生产程序文件。
从菜单栏中点击“文件”/“打开”,则显示如下的画面。
选择文件,点击“打开”,读入选中的文件。