00191912-01.pdf - 第56页
1 Einleitung Betriebsanleitung SIPLACE 80S-20/F4 1.13 Baugruppenübersicht - Bestückköpfe Softwareversion SR.406.xx Ausgabe 02/2000 DE 54 1.13 Baugruppenübersi c ht - Best ückköpfe 1.13.1 Aufbau des 12-Segment-Revolverkop…
Betriebsanleitung SIPLACE 80S-20/F4 1 Einleitung
Softwareversion SR.406.xx Ausgabe 02/2000 DE 1.12 Baugruppenübersicht - Portal
53
1.12.3 Technische Daten der X-Achse
1.12.4 Aufbau der Y-Achse
Die y-Achse besteht im wesentlichen aus folgenden Hauptbaugruppen: 1
– Gleichstrom-Servomotor
– Y-Zahnriemen
– Y-Führungssystem
– Y-Achsenmesssystem
1
Jede y-Achse wird von einem Drehstrom-Servomotor angetrieben. Eine Anticrashschaltung be-
grenzt die Verfahrwege der Portale gegeneinander. 1
1.12.5 Technische Daten der Y-Achse
Antrieb Gleichstrom-Servomotor/Zahnriemen
Max. Geschwindigkeit 2,0 m/sec.
Verfahrweg 620 mm
Wegmesssystem Linearer Metallmaßstab
Maßstabslänge 646 mm
Auflösung 2,5 µm
Antrieb Gleichstrom-Servomotor / Zahnriemen
Max. Geschwindigkeit 2,5 m/sec.
Verfahrweg der Portale 910 mm
Wegmesssystem Lineare Metallmaßstäbe
Maßstabslänge 970 mm
Auflösung 2,5 µm
1 Einleitung Betriebsanleitung SIPLACE 80S-20/F4
1.13 Baugruppenübersicht - Bestückköpfe Softwareversion SR.406.xx Ausgabe 02/2000 DE
54
1.13 Baugruppenübersicht - Bestückköpfe
1.13.1 Aufbau des 12-Segment-Revolverkopfes/
1
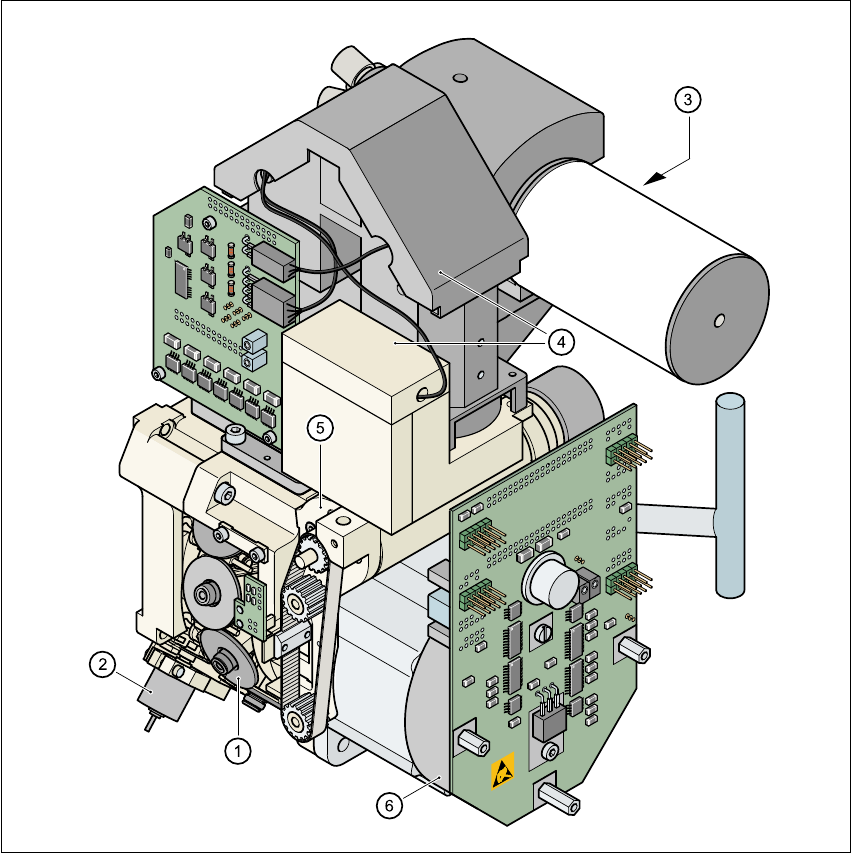
Abb. 1.13 - 1 Aufbau des 12-Segment-Revolverkopfes
(1) Stern mit 12 Pinolen (2) Motor, Ventilstellantrieb "Abwurf"
(3) Drehstation (4) BE-Visionmodul
(5) Z-Achsenantrieb (6) Sternmotor
Betriebsanleitung SIPLACE 80S-20/F4 1 Einleitung
Softwareversion SR.406.xx Ausgabe 02/2000 DE 1.13 Baugruppenübersicht - Bestückköpfe
55
Alle Bauelemente werden mit der gleichen Taktzeit bestückt. Bevor das Bauelement bestückt
wird, wird es mit dem Visionmodul optoelektronisch vermessen. 1
– Die BE-Visionkamera erstellt ein Abbild des aufgenommenen Bauelements.
– Zudem wird die genaue Lage des Bauelements bestimmt.
– Die Gehäuseform des aufgenommen Bauelements wird mit der programmierten Gehäuseform
verglichen, um das Bauelement zu identifizieren. Nicht identifizierte Bauelemente werden ab-
geworfen.
– Die Drehstation dreht das Bauelement in die geforderte Bestücklage.
1.13.2 Beschreibung des 12-Segment-Revolverkopfes
– Der 12-Segment-Revolverkopf arbeitet nach dem Collect & Place - Prinzip, d. h. die Bauele-
mente werden mit Hilfe eines Vakuums von den Pipetten aufgenommen und nach einem kom-
pletten Aufnahmezyklus mit Hilfe von Blasluft sanft und positionsgenau auf die Leiterplatte
aufgesetzt. Zugleich wird das Vakuum in den Pipetten mehrmals überprüft um festzustellen,
ob die Bauelemente auch korrekt abgeholt bzw. aufgesetzt wurden.
– Der "lernfähige" Sensorstopp-Modus der Z-Achse gleicht LP-Unebenheiten beim Absetzen
der Bauelemente aus.
– Fehlerhafte Bauelemente werden abgeworfen und in einem Reparaturlauf nachbestückt.
1.13.3 Technische Daten des 12-Segment- Revolverkopfes
Bauelementespektrum 0402 bis 18,7mm x 18,7mm inkl. BGA, µBGA, Flip-
Chip, TSOP, QFP, PLCC, SO bis SO32, DRAM
Max. Höhe 6 mm
Min. Beinchenraster 0,5 mm
Min. Abmessungen 0,5 mm x 1,0 mm
Max. Abmessungen 18,7 mm x 18,7 mm
Max. Gewicht 2 g
Max. Hub der z-Achse 16 mm
Programmierbare Aufsetzkraft 2,4 bis 5,0 N
Pipettentypen 7xx
Winkelgenauigkeit ± 0,525° / 3 σ, ± 0,70° / 4 σ, ± 1,05° / 6 σ
Bestückgenauigkeit ± 67,5 µm / 3 σ, ± 90 µm / 4 σ, ± 135 µm / 6 σ