99419_UR5e_User_Manual_zh_Global.pdf - 第103页
18 . 前 言 本 章 提 供 了 开 始 使 用 U ni ve rsal R o bots 机 器 人 所 需 的 基 本 信 息 。 提 示 在 首 次 接 通 机 器 人 电 源 之 前 , 您 指 定 的 U ni vers al R obo ts 机 器 人 集 成 商 必 须 : 1. 阅 读 硬 件 安 装 手 册 中 的 安 全 信 息 。 2. 设 置 风 险 评 估 定 义 的 安 全 配 置 参 数 ( 请…
UR5e 88 用 户 手 册
第 II 部 分 PolyScope 手 册
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
18.前言
本章提供了开始使用 Universal Robots 机器人所需的基本信息。
提示
在首次接通机器人电源之前,您指定的 Universal Robots 机器人集成商必须:
1. 阅读硬件安装手册中的安全信息。
2. 设置风险评估定义的安全配置参数( 请参阅22.安全配置 在本页107) 。
18.1. 机器人手臂基础
Universal Robots 机器人手臂由挤压铝管和关节组成。您可以使用 PolyScope 来协调这些关节
的运动以移动机器人手臂。将工具连接到机器人手臂或工具法兰 的末端。移动机器人手臂即
可放置工具。您不能将工具定位在基座的正上方或正下方。
• 基座 :机器人的安装位置。
• 肩部和肘部:进行更大的动作。
• 手腕 1 和手腕 2:进行更精细的动作。
• 手腕 3:工具与工具法兰连接的位置。
18.2. Polyscope 基础
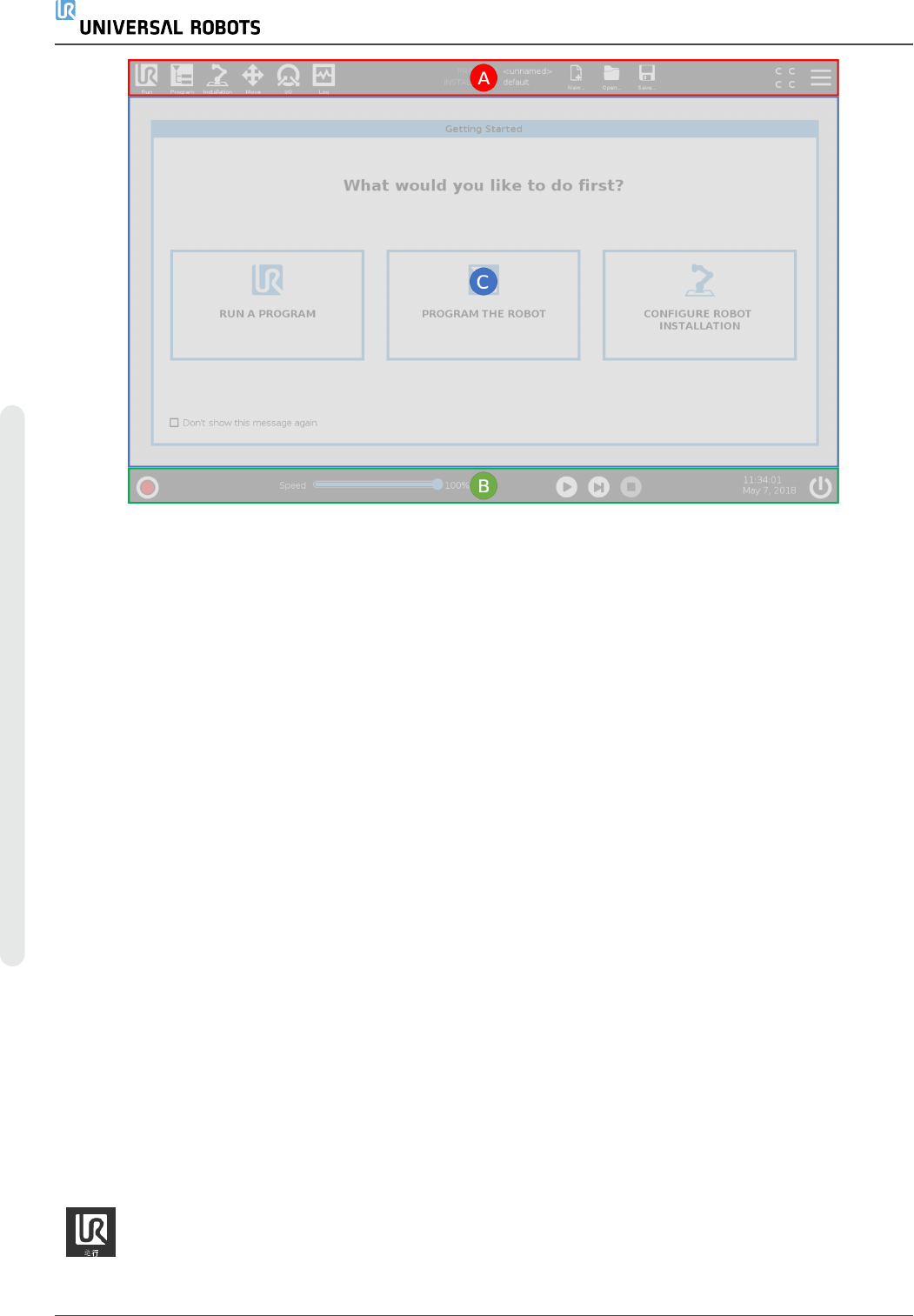
PolyScope 是示教盒上的图形用户界面 (GUI),可通过触摸屏操作机器人手臂。您可以在
PolyScope 中为机器人创建、加载和执行程序。PolyScope 界面的构成情况如下图所示:
• A:页眉,包含可为您打开交互式屏幕的图标/选项卡。
• B:页脚,包含可控制所加载程序的按钮。
• C:屏幕,包含可管理和监控机器人动作的字段和选项。
用 户 手 册 89 UR5e
18.前 言
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
18.2.1. 触摸屏
示教盒触摸屏针对工业环境进行了优化。与消费类电子产品不同,示教盒触摸屏的灵敏度在
设计上更能抵抗如下环境因素:
• 水滴和/或机器冷却液滴
• 无线电波发射
• 来自操作环境的其他传导噪音。
触摸灵敏度旨在避免在 PolyScope 上进行错误选择,并防止机器人意外运动。
使 用 触 摸 屏
为了获得最佳效果,请用指尖在屏幕上进行选择。
在本手册中,这种操作称为“点按”。
如果需要,可以使用市场上可买到的手写笔在屏幕上进行选择。
以下部分列出并定义了 PolyScope 界面中的图标/选项卡和按钮。
18.2.2. 页眉图标/选项卡
运行是一种使用预编程序操作机器人的简单方法。
UR5e 90 用 户 手 册
18.前 言
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。