99419_UR5e_User_Manual_zh_Global.pdf - 第108页
18. 4.1. 启 动 机 器 人 手 臂 警 告 在 启 动 机 器 人 手 臂 之 前 , 请 务 必 确 认 实 际 有 效 载 荷 和 安 装 正 确 无 误 。 如 果 这 些 设 置 错 误 , 机 器 人 手 臂 和 控 制 箱 将 无 法 正 常 工 作 , 并 可 能 会 对 人 员 或 设 备 造 成 危 险 。 小 心 确 保 机 器 人 手 臂 没 有 接 触 物 体 ( 例 如 桌 子 ) , 因 为 机 器…

警告
倾翻的危险如果机器人没有安全地放置在坚固的表面上,机器人有可能会倾倒
并造成伤害。
18.3.2. 开/关控制箱
控制箱主要包含连接机器人手臂、示教盒和任何周边设备的物理电气输入/输出接口。必须打
开控制箱才能给机器人手臂通电。
1. 按下示教盒的电源按钮开启控制箱。
2. 等待底层操作系统的文字( 后接按钮) 出现在屏幕上。
将会出现“入门”屏幕,提示您开始对机器人进行编程。
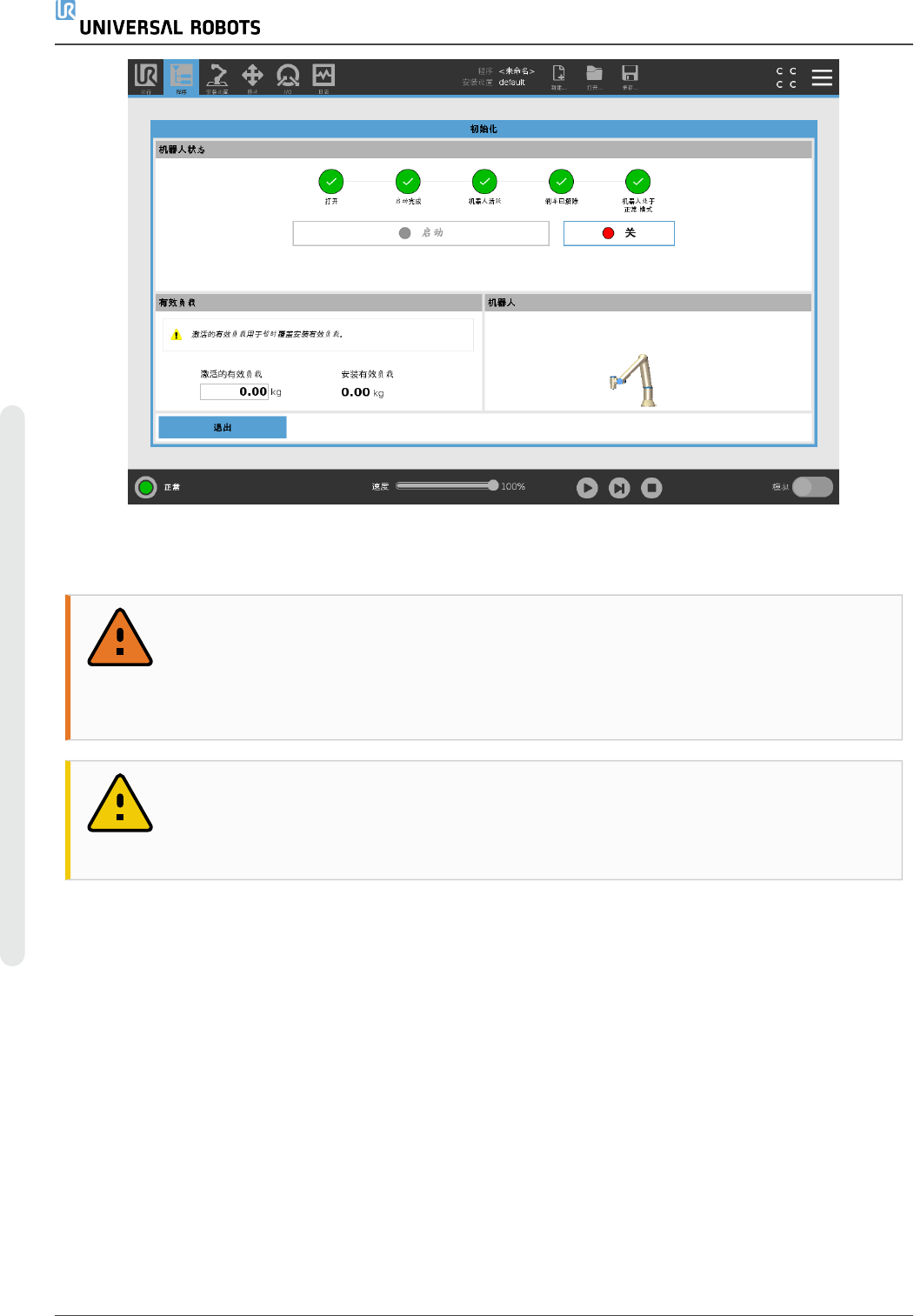
18.4. 初始化
首次启动时,可能出现“无法继续”对话框。选择转到初始化屏幕访问“初始化”屏幕。
在页脚的左侧,“初始化 ”按钮使用颜色指示机器人手臂的状态:
• 红色关机。机器人手臂处于停止状态。
• 黄色空闲。机器人手臂已通电,但并未准备好进行正常操作。
• 绿色正常。机器人手臂已通电,并准备好进行正常操作。
用 户 手 册 93 UR5e
18.前 言
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
18.4.1. 启动机器人手臂
警告
在启动机器人手臂之前,请务必确认实际有效载荷和安装正确无误。如果这些
设置错误,机器人手臂和控制箱将无法正常工作,并可能会对人员或设备造成
危险。
小心
确保机器人手臂没有接触物体( 例如桌子) ,因为机器人手臂与障碍物之间的碰
撞可能会损坏关节齿轮箱。
如要启动机器人:
1. 点击带有绿色 LED 的 ON 按钮启动初始化过程。然后,LED 指示灯变成黄色,指示电源
已打开并处于空闲状态。
2. 点击启动按钮松开制动器。
3. 点按带有红色 LED 的 OFF 按钮关闭机器人手臂。
• PolyScope 启动后,点按 ON 按钮一次给机器人手臂通电。然后,状态指示灯变成黄色,
指示机器人已打开并处于空闲状态。
• 在机器人手臂状态为空闲时,点按“启动”按钮启动机器人手臂。此时,传感器数据会根
据配置的机器人手臂安装数据进行核对。
UR5e 94 用 户 手 册
18.前 言
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
如果出现不匹配( 公差为 30
∘
) ,该按钮会被禁用,按钮下方会显示错误消息。
• 验证安装后,点按“启动”释放所有关节制动器,机器人手臂将准备好进行正常操作。
当关节制动器被释放时,机器人手臂启动,伴随声音和轻微的移动。
18.5. 快速系统启动
使用 PolyScope 前,确认机器人手臂和控制箱安装正确。
1. 按下示教盒上的紧急停止按钮。
2. 按下示教盒上的电源按钮让系统启动,PolyScope 上会显示文字。
3. 触摸屏上出现一个弹出窗口,指示系统已准备就绪,机器人必须初始化。
4. 在弹出对话框中,点按转到初始化屏幕以访问初始化屏幕。
5. 解锁紧急停止按钮,将机器人状态从紧急停止更改为关闭电源。
6. 请站在机器人可触及的范围( 工作空间) 之外。
7. 点按初始化机器人屏幕上的开启按钮,使机器人状态更改为空闲。
8. 在有效载荷字段的激活的有效载荷中,验证有效载荷质量。您还可以在机器人字段中验
证安装位置是否正确。
9. 点按开始按钮,让机器人释放其制动系统。机器人震动并发出咔嗒声指示它已做好被编
程的准备。
提示
访问www.universal-robots.com/academy/,了解 Universal Robots 机器人
编程知识
18.6. 第一个程序
程序是一个告诉机器人该做什么的命令列表。对于大多数任务,编程可完全使用 PolyScope 完
成。使用一系列路点来设置一个让机器人手臂跟随的路径,示教机器人手臂如何移动。
使用“移动”选项卡( 请参阅26.移动选项卡 在本页215) 将机器人手臂移动到所需的位置,在按
住示教盒顶部的“自由驱动”按钮的同时将机器人手臂拉到位来示教位置。
您可以创建一个程序,向机器人路径中特定点处的其他机器发送 I/O 信号,并根据变量和 I/O
信号执行 if…then 和 loop 等命令。
以下是一个简单的程序,它允许机器人手臂在两个路点之间移动。
要创建简单程序
1. 在 PolyScope 的页眉文件路径中,点按新建… 并选择程序。
2. 在“基本”下,点按路点,向程序树中添加一个路点。默认的 MoveJ 也被添加到程序树中。
3. 选择新的路点,然后在“命令”选项卡中,点按路点。
用 户 手 册 95 UR5e
18.前 言
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。