99419_UR5e_User_Manual_zh_Global.pdf - 第113页
19 . 自 由 驱 动 本 章 介 绍 如 何 在 “ 自 由 驱 动 ” 模 式 下 使 用 机 器 人 手 臂 。 “ 自 由 驱 动 ” 可 将 机 器 人 手 臂 手 动 拉 伸 到 理 想 的 位 置 和 位 姿 。 使 用 “ 自 由 驱 动 ” 时 , 如 果 机 器 人 手 臂 接 近 关 节 极 限 或 安 全 平 面 , 则 会 产 生 排 斥 力 ( 请 参 阅 22. 11. 平 面 在 本 页 112 )…
18.8. 机器人网络安全
在实施网络安全之前,您必须进行风险评估,以便:
• 识别威胁
• 定义信任区和管道
• 指定应用程序中每个组件的要求。
18.8.1. 网络安全先决条件
请确保以下几点,以便您的系统能够达到安全运行状态:
• 您对 Universal Robots 机器人中使用的一般网络安全原则和高级技术有透彻的了解。
• 您采取物理安全措施,仅允许受信任的人员对机器人进行物理访问。
• 您只将机器人连接到受信任的网络,该网络位于防火墙之后,从而限制进出互联网的访
问。
18.8.2. 加强网络安全
尽管 PolyScope 包括许多可确保网络连接安全的功能,您仍可以通过遵循以下准则来提高安
全性:
• 在将机器人连接到任何网络之前,请始终设置管理员密码( 请参阅管理员 在本页232) 。
• 使用内置设置,尽可能限制对机器人的网络访问。
• 有些通信接口没有对所建立的连接进行身份验证的方法。在某些应用程序中,这将是安
全隐患。
• 如果需要远程访问机器人的运动控制接口,请使用本地端口转发( 请参阅启用 SSH 访问
在本页237) 来建立经过身份验证的安全连接。例如:仪表板服务器和主要/次要/实时客
户端接口。
• 在机器人停止使用之前,请从中移除敏感数据。请特别注意 URCap( 请参阅24.13.
URCap在本页174) 和程序文件夹中的数据。
UR5e 98 用 户 手 册
18.前 言
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
19.自由驱动
本章介绍如何在“自由驱动”模式下使用机器人手臂。
“自由驱动”可将机器人手臂手动拉伸到理想的位置和位姿。
使用“自由驱动”时,如果机器人手臂接近关节极限或安全平面,则会产生排斥力( 请参阅
22.11. 平面 在本页112) 。
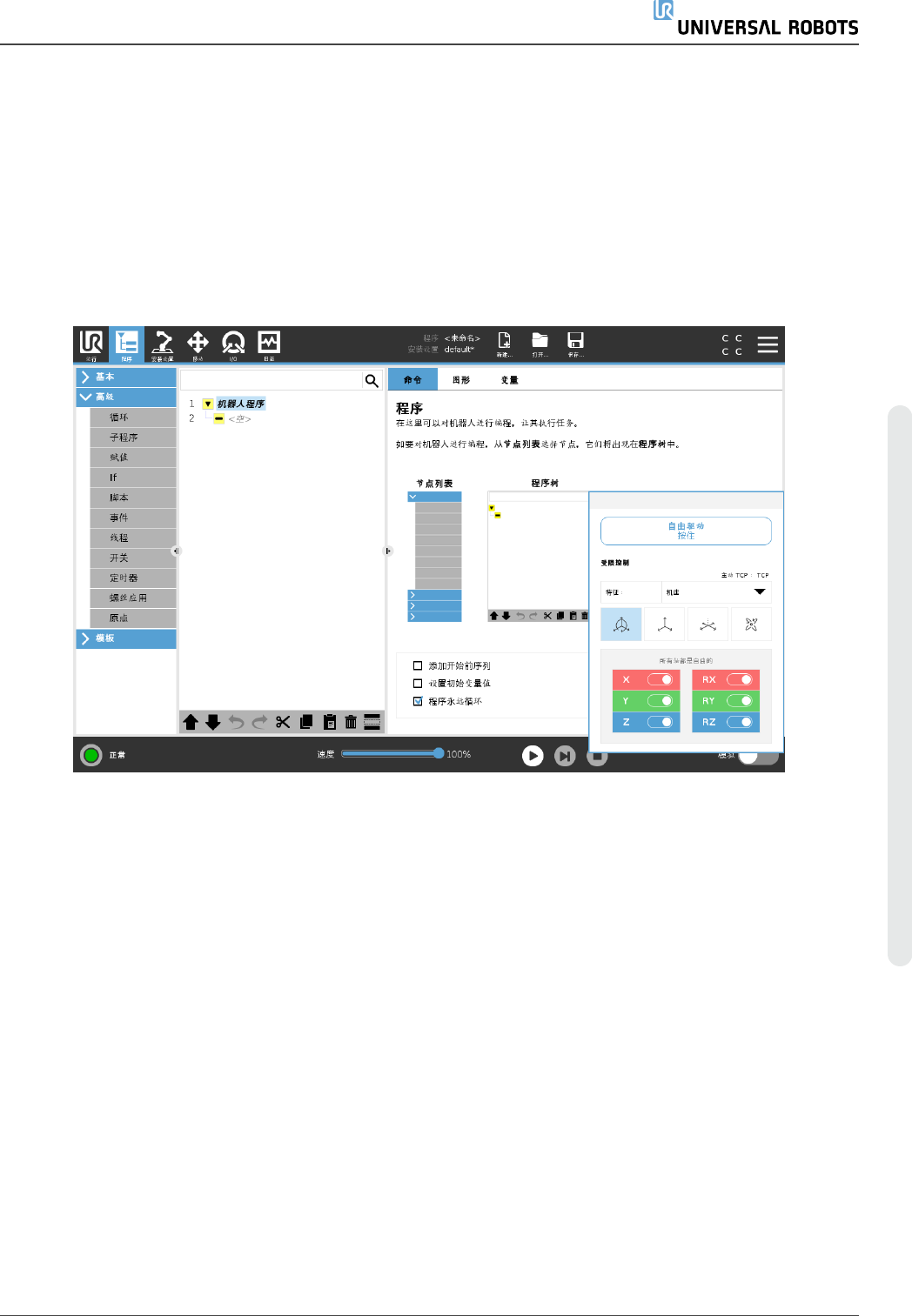
当机器人手臂处于“自由驱动”模式时,PolyScope 上将出现一个面板,如下图所示。
“自由驱动”面板上状态栏中的 LED 指示:
• 当一个或多个关节接近其关节限值时。
• 当机器人手臂的位置接近奇点时。当机器人接近奇点时,阻力会增加,会使其感到难以
定位。
用 户 手 册 99 UR5e
19.自 由驱 动
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
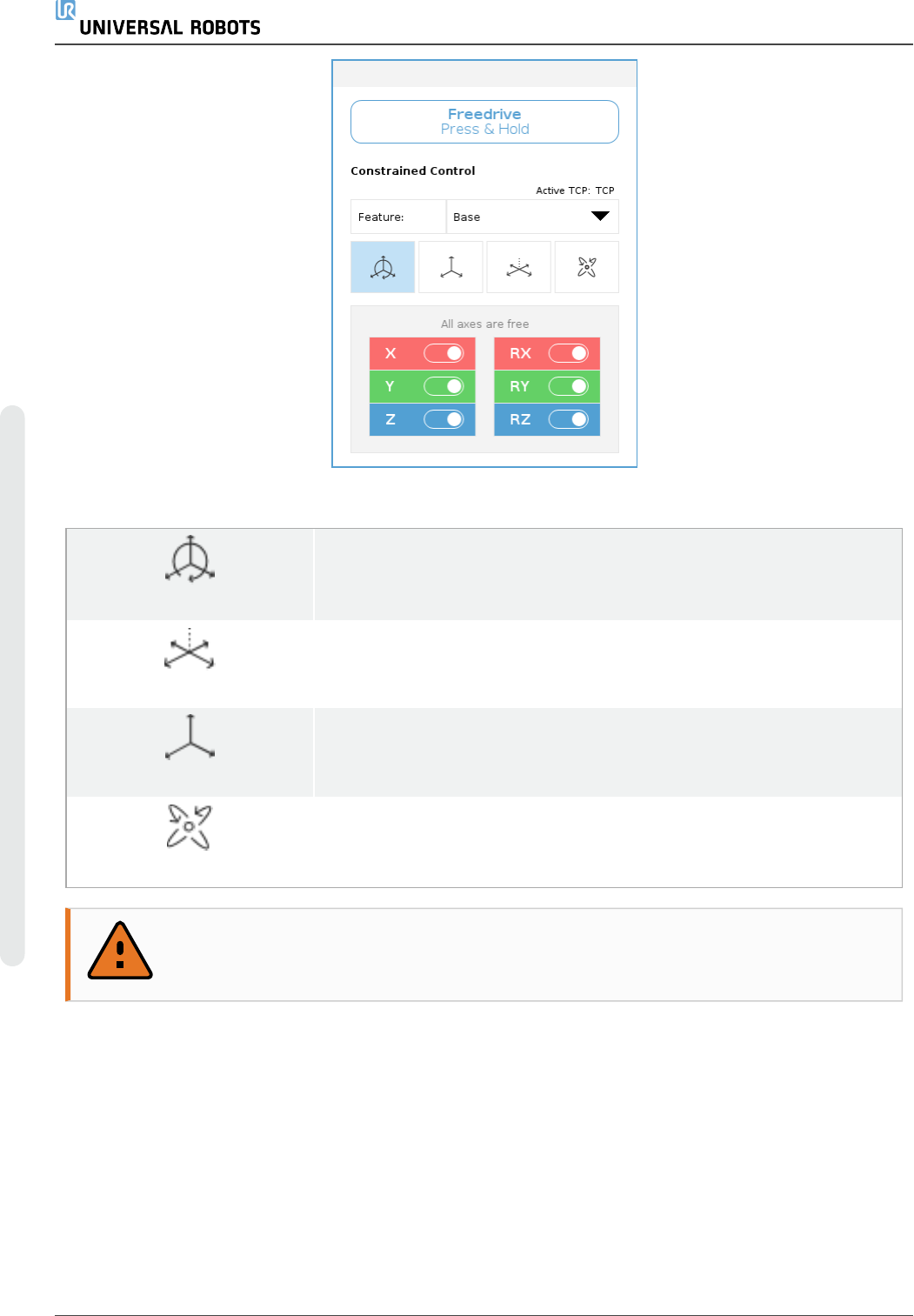
您可以锁定一个或多个轴,以允许 TCP 在下表所定义的特定方向上移动。
所有轴都是自由的
允许通过所有轴移动。
平面
只允许通过 X 轴和 Y 轴移动。
平移
允许通过所有轴移动,无旋转。
旋转
允许在所有轴上以球面运动方式绕 TCP 移动。
警告
连接工具时,在某些轴上移动机器人手臂可能会出现夹点。
19.1. 启用自由驱动:标准示教盒
您可以通过以下方式启用自由驱动:
• 使用“自由驱动”按钮。
• 使用“移动”选项卡屏幕上的“自由驱动”按钮( 请参阅26.2.4. 自由驱动 在本页216)
• 使用 I/O 动作( 请参阅) 。
UR5e 100 用 户 手 册
19.自 由驱 动
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。