99419_UR5e_User_Manual_zh_Global.pdf - 第121页
22 . 安 全 配 置 22 . 1 . 安 全 设 置 基 础 本 节 介 绍 如 何 访 问 机 器 人 安 全 设 置 。 它 由 帮 助 您 设 置 机 器 人 安 全 配 置 的 各 个 部 分 组 成 。 警 告 在 配 置 机 器 人 安 全 设 置 之 前 , 集 成 商 必 须 执 行 风 险 评 估 以 保 证 机 器 人 周 围 的 人 员 和 设 备 安 全 。 风 险 评 估 是 对 机 器 人 整 个 …
UR5e 106 用 户 手 册
21.操 作模 式选 择
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
22.安全配置
22.1. 安全设置基础
本节介绍如何访问机器人安全设置。它由帮助您设置机器人安全配置的各个部分组成。
警告
在配置机器人安全设置之前,集成商必须执行风险评估以保证机器人周围的人
员和设备安全。风险评估是对机器人整个寿命期间所有工作程序的评估,执行
风险评估是为了应用正确的安全配置设置(see硬件安装手册)。您必须根据
集成商的风险评估进行下列设置。
1. 集成商必须防止未授权人员更改安全配置,比如安装密码保护。
2. 针对特定机器人应用使用和配置安全相关功能和接口(see硬件安装手
册)。
3. 在机器人手臂第一次通电之前,进行设置和示教的安全配置设置。
4. 可在该屏幕及子选项卡上访问的所有安全配置设置。
5. 集成商必须确保安全设置的所有更改符合风险评估。
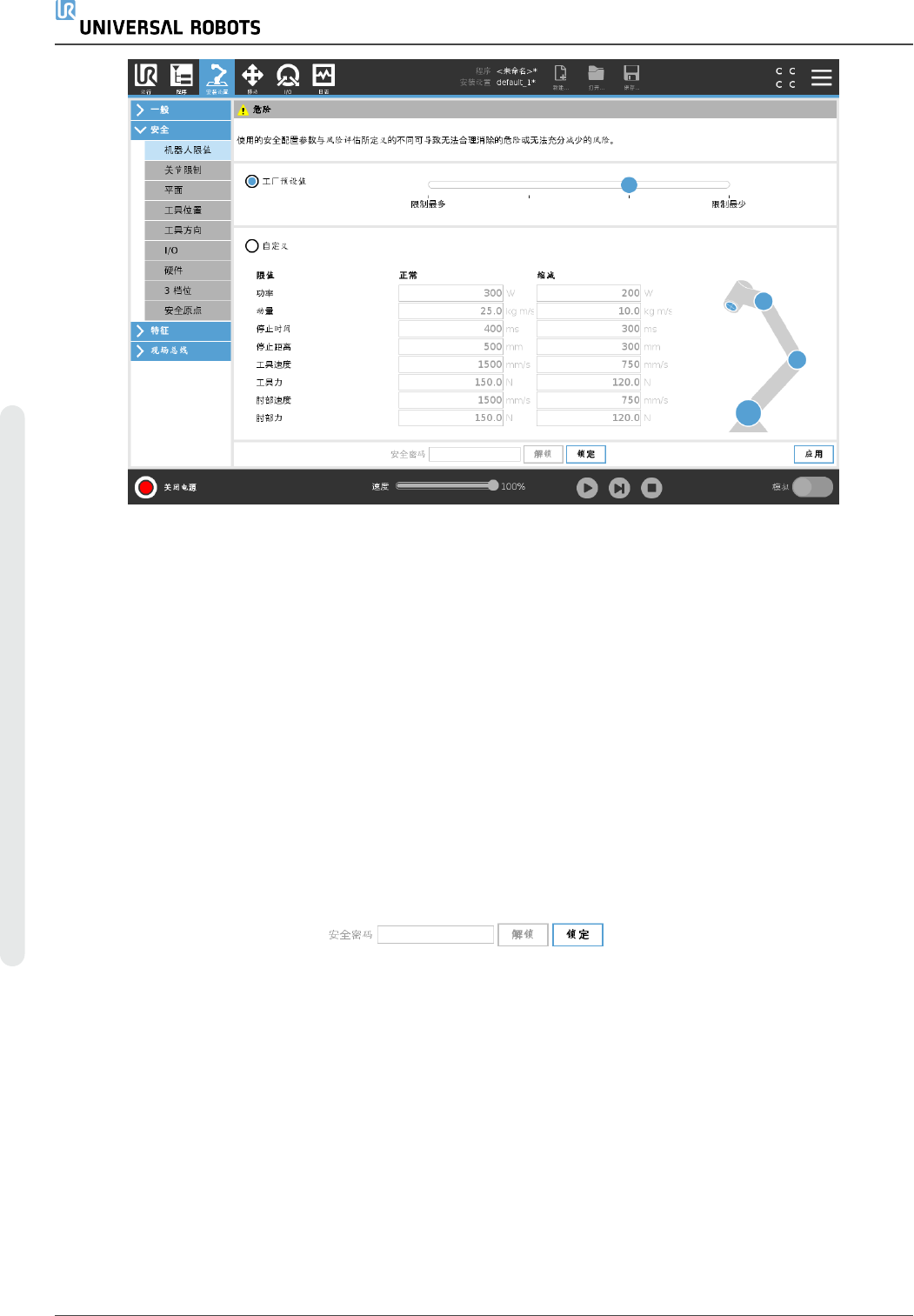
22.1.1. 访问安全配置
注意:安全设置由密码保护,只有在设置并使用密码之后才能进行配置。
1. 在 PolyScope 页眉中,点按安装设置图标。
2. 在屏幕左侧的边栏菜单中,点按安全。
3. 此时将显示机器人限值屏幕,但设置处于不可访问状态。
4. 如果先前设置了安全密码,则输入密码,然后按解锁,让设置变为可访问状态。注意:一
旦安全设置被解锁,所有设置将被激活。
5. 按锁定选项卡或离开“安全”菜单会再次锁定所有安全项设置。
用 户 手 册 107 UR5e
22.安 全配 置
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
您可以在Hardware Installation Manual中找到更多安全系统信息。
22.2. 设置安全密码
必须设置一个密码来解锁组成安全配置的所有安全设置。如果没有应用安全密码,将会提示
设置安全密码。
1. 在 PolyScope 页眉的右侧,点按汉堡菜单并选择设置。
2. 在屏幕左侧的蓝色菜单中,按密码,然后选择安全。
3. 在新密码中,键入密码。
4. 现在,在确认新密码中,键入相同的密码,然后按应用。
5. 按蓝色菜单左下方的退出按钮返回上一个屏幕。
您可以按锁定选项卡或导航到“安全”菜单以外的屏幕来重新锁定所有安全设置。
22.3. 更改安全配置
安全配置设置的更改必须符合集成商执行的风险评估(see硬件安装手册)。
推荐程序:
1. 验证更改符合集成商执行的风险评估。
2. 将安全设置调整到集成商执行的风险评估所定义的适当水平。
3. 验证设置已应用。
4. 将下面这段话记录在操作员手册中:
UR5e 108 用 户 手 册
22.安 全配 置
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。