99419_UR5e_User_Manual_zh_Global.pdf - 第154页
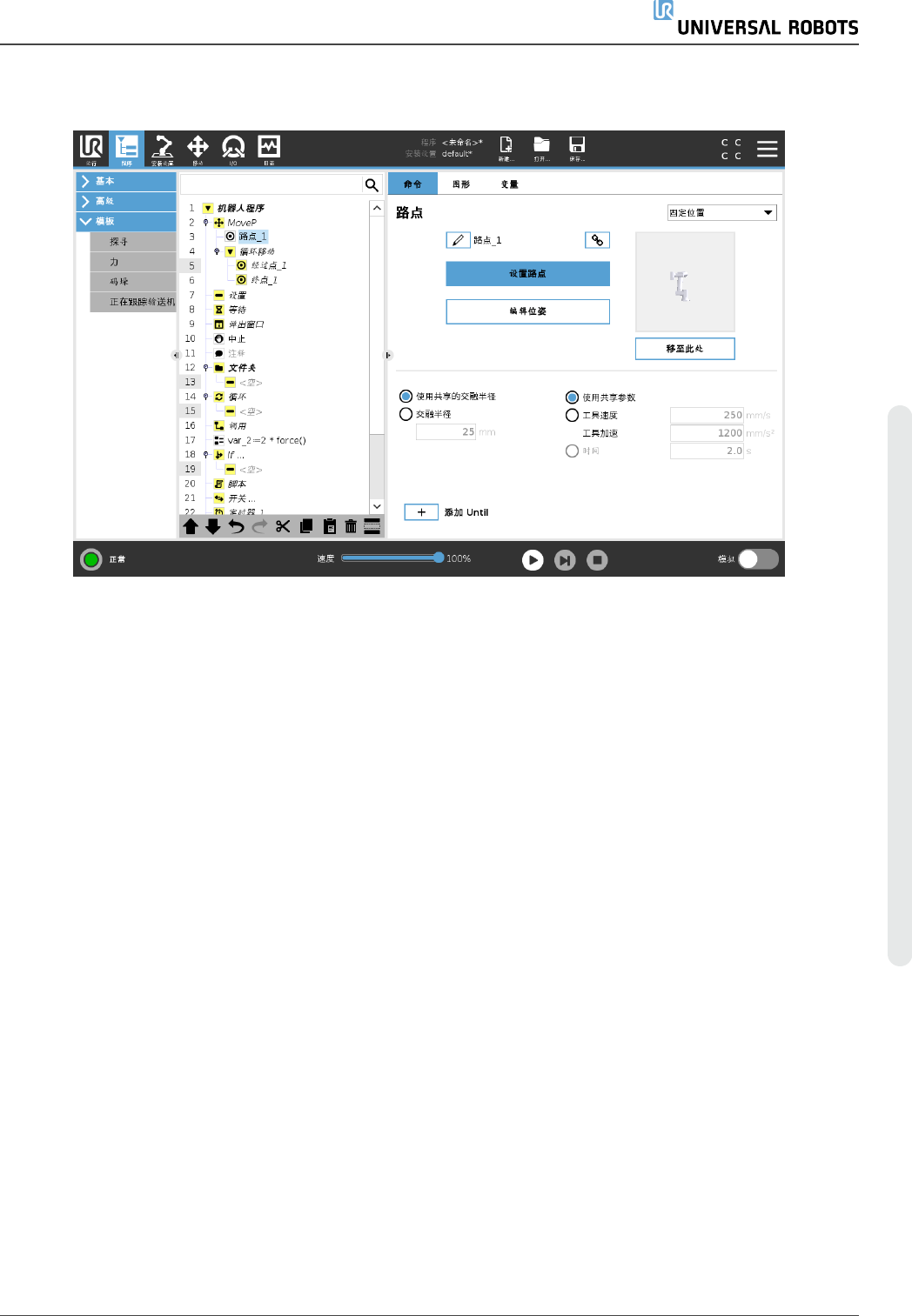
设 置 路 点 路 点 名 称 路 点 会 自 动 获 得 唯 一 的 名 称 。 用 户 可 更 改 此 名 称 。 通 过 选 择 链 接 图 标 , 路 点 被 链 接 并 共 享 位 置 信 息 。 其 它 路 点 信 息 ( 比 如 交 融 半 径 、 工 具 / 关 节 速 度 以 及 工 具 / 关 节 加 速 度 ) 针 对 单 个 路 点 配 置 , 即 使 它 们 可 能 被 链 接 。 交 融 交 融 使 机 器 …
24.10.2. 固定路点
机器人路径上的点。路点是机器人程序最核心的部分,用于指示机器人手臂应移动到哪个位
置。固定位置路点通过将机器手臂实际移至相应位置来示教。
示 教 路 点
示教是用于向机器人显示如何根据应用的特征定位 TCP 的术语。如要向机器人示教一个路
点,请按以下说明操作:
1. 在“程序”选项卡中,插入一个移动节点。
2. 在移动节点上,使用设置 TCP 下拉菜单设置 TCP。
3. 在移动节点上,使用特征下拉菜单选择一个特征。
4. 在路点节点上,使用示教模式或缓慢移动将机器人定位于所需配置。
使 用 路 点
使用路点意味着在当前情况下应用特征与 TCP 之间的示教关系。应用于当前所选特征的特征
与 TCP 之间的关系实现了期望的 TCP 位置。然后机器人计算出如何定位自己以使当前活动
的 TCP 到达该 TCP 位置。如要使用一个路点,请按以下说明操作:
1. 在移动节点中使用现有路点,或将路点插入到不同的移动节点中
( 比如通过复制和粘贴或使用路点上的“链接”按钮) 。
2. 设置目标 TCP。
3. 设置目标特征。
用 户 手 册 139 UR5e
24.程 序选 项卡
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
设 置 路 点
路 点 名 称
路点会自动获得唯一的名称。用户可更改此名称。通过选择链接图标,路点被链接并共享位置
信息。其它路点信息( 比如交融半径、工具/关节速度以及工具/关节加速度) 针对单个路点配
置,即使它们可能被链接。
交 融
交融使机器人能够在两个轨迹之间平顺过渡,而不会停在它们之间的路点处。
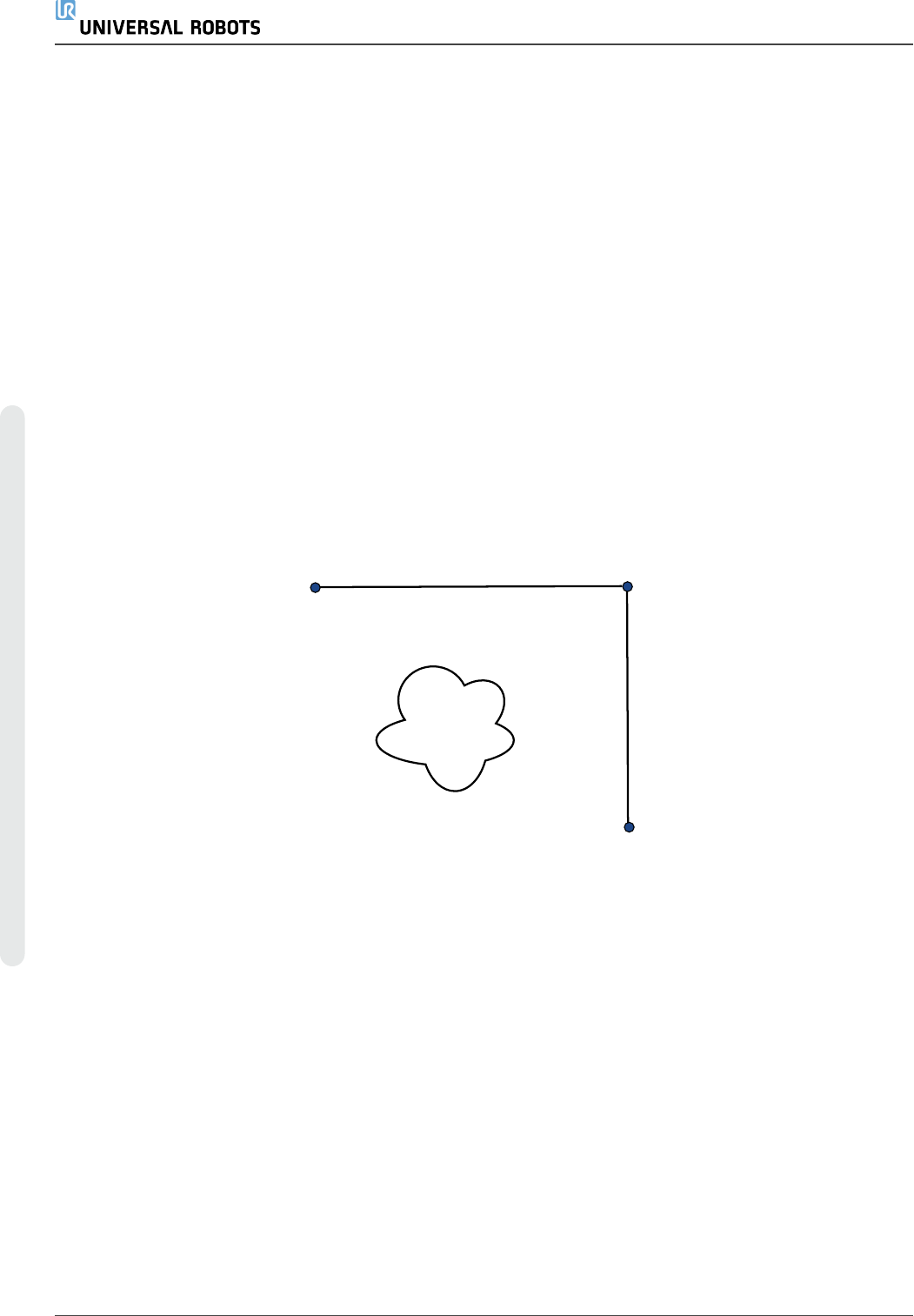
示 例
以一个抓取和放置应用为例( 参见图 12.2 ) ,在本例中,机器人当前位于路点 1 (WP_1) ,它需
要拾取路点 3 (WP_3) 处的物体。为避免与物体和其他障碍物 (O) 发生碰撞,机器人必须从路
点 2 (WP_2) 的方向接近 (WP_3) 。
因此引入三个路点来创建一个满足要求的路径。
WP_1
WP_2
WP_3
O
12.2:(WP_1)
:初始位置,
(WP_2)
:通过点,
(WP_3)
:拾取位置,
(O)
:障碍物。
如果不配置其它设置,在继续移动之前,机器人将在每个路点处停止。对于此任务而言,在
(WP_2) 处停止不是最理想的,因为平滑转弯需要的时间和能量更少,同时仍能满足要求。只
要从第一个轨迹到第二个轨迹的过渡在此位置附近发生,机器人不完全到达 (WP_2) 也是可
接受的。
通过为路点配置一个交融以允许机器人计算进入下一个轨迹的平顺过渡,可避免机器人在
(WP_2) 处停止。交融的主参数是一个半径。当机器人位于路点的交融半径以内时,它可能启
动交融并偏离原始路径。这允许更快、更平顺的移动,因为机器人不需要减速和再加速。
交 融 参 数
除了路点外,还有多个参数会影响交融轨迹( 参见图 12.3) :
UR5e 140 用 户 手 册
24.程 序选 项卡
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
• 交融半径 (r )
• 机器人的初始速度和最终速度( 分别位于 p1 和 p2 位置)
• 移动时间( 例如:若为轨迹设置一个具体时间,将影响机器人的初始/最终速度)
• 交融起始和结束的轨迹类型 (MoveL, MoveJ)
r
WP_1
WP_2
WP_3
p1
p2
O
12.3:
在
(WP_2)
上方交融的半径为
r
,初始交融位置为
p1
,最后交融位置为
p2
。
(O)
是障
碍物。
如果设置了交融半径,机器手臂轨迹即会绕过路点从其周围经过,以使机器手臂不会停在该
点。
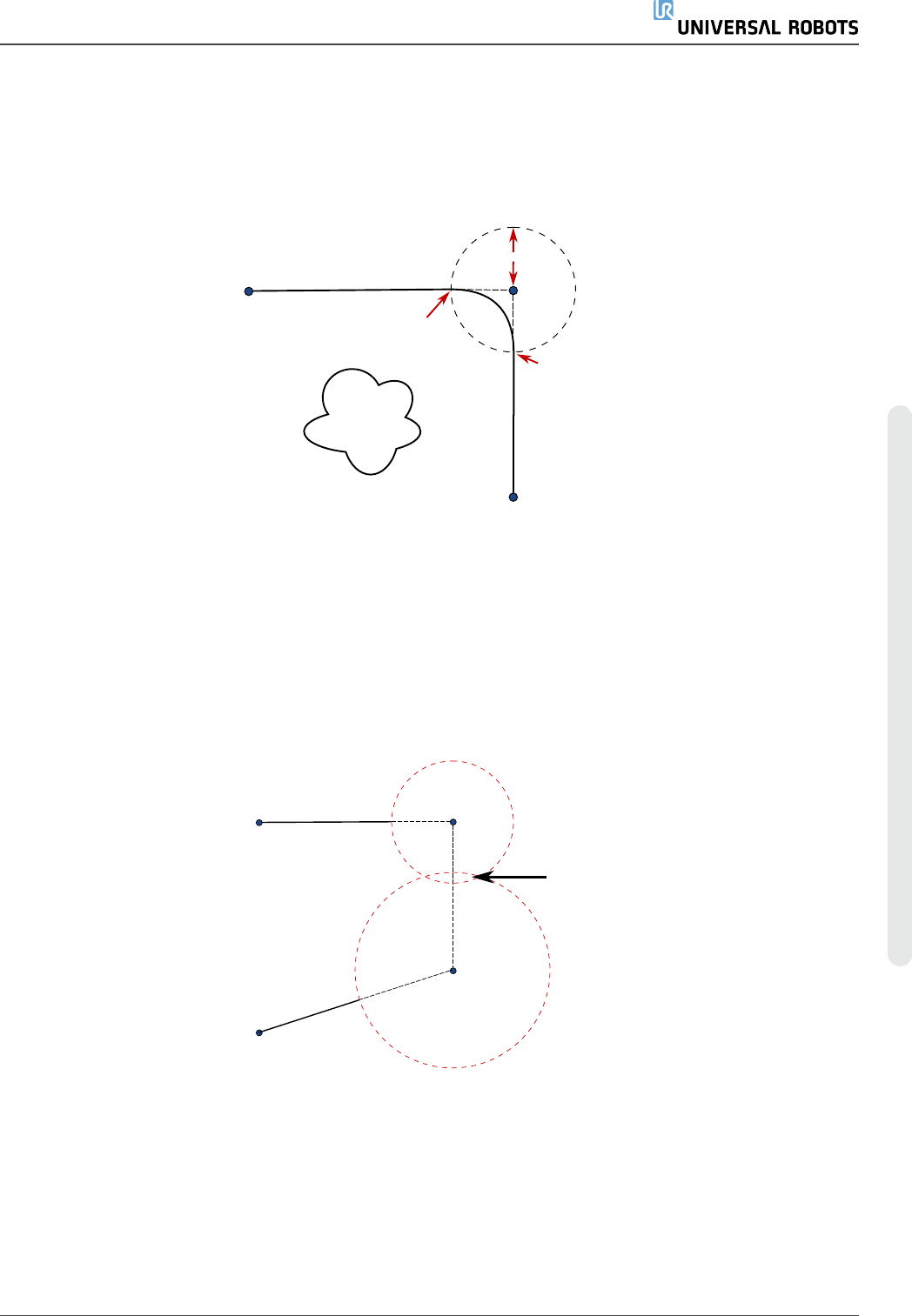
交融不能重叠,因此不能设置一个与上一路点或下一路点的交融半径重叠的交融半径,如图
12.4 所示。
WP_1
WP_2
WP_3
WP_4
*
12.4:
不允许交融半径重叠 (*)。
用 户 手 册 141 UR5e
24.程 序选 项卡
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。