99419_UR5e_User_Manual_zh_Global.pdf - 第159页
24. 10.4. 可 变 路 点 可 变 路 点 是 指 该 路 点 的 位 置 由 变 量 给 定 , 在 本 例 中 为 c al cu la ted_ pos 。 变 量 必 须 是 一 个 位 姿 , 例 如 v ar= p[0 .5,0 .0,0 .0,3. 14,0 .0,0 .0] 。 前 三 个 数 字 表 示 x ,y,z 坐 标 , 后 三 个 数 字 表 示 由 矢 量 rx,ry ,rz 给 定 的 旋 转 矢…
条轨迹之间的平滑插值交融。机器人可以在遵循圆弧路径之前在轨迹上减速以避免非
常高的加速度( 例如,如果两个轨迹之间的角度接近 180 度) 。
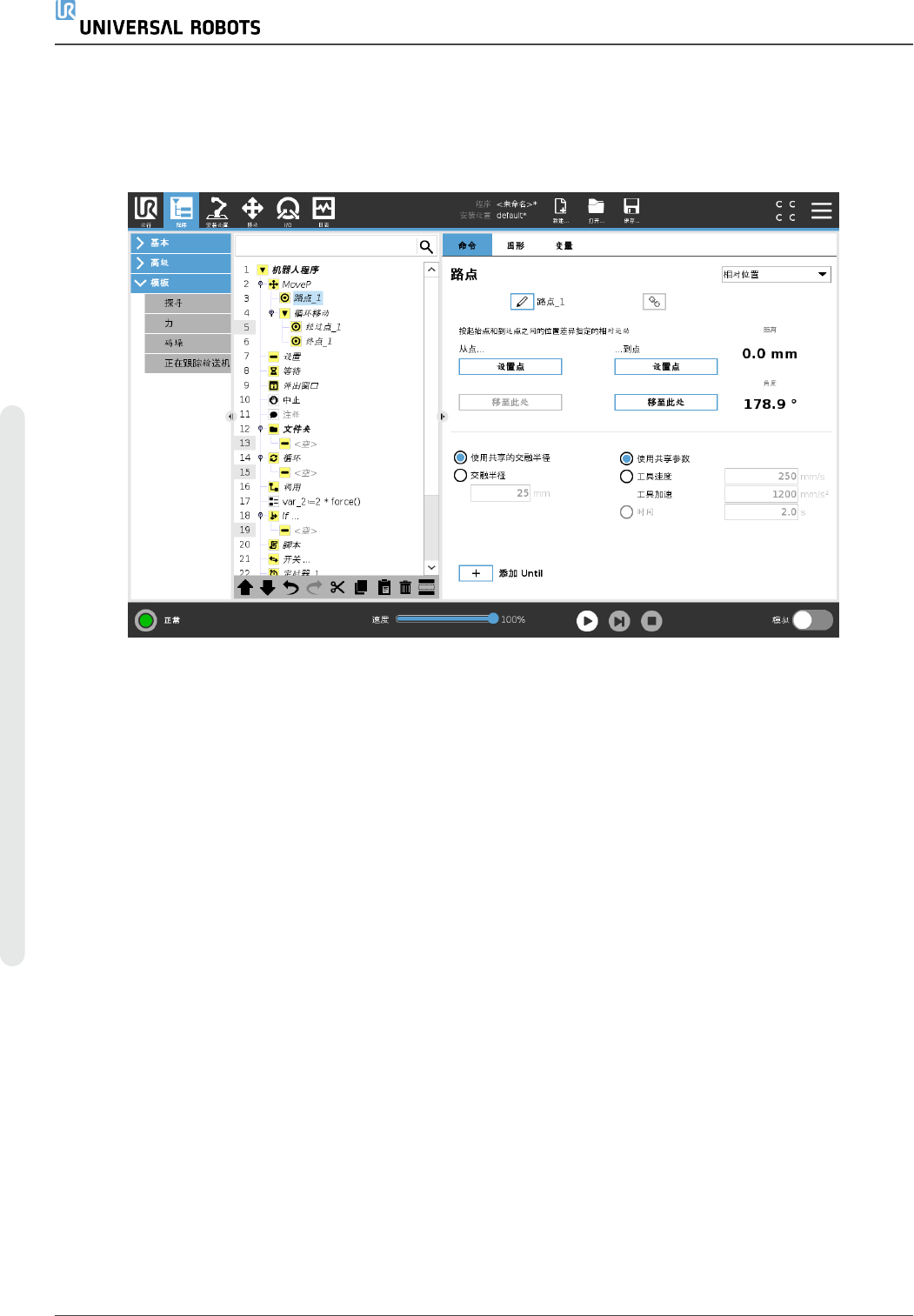
24.10.3. 相对路点
相对路点是指该路点的位置是以相对于机器人手臂上一个位置的位置差的方式给出的,例如
“偏左两厘米”。相对位置定义为两个给定位置( 从左到右) 之间的差。
注意:重复的相对位置可能会将机器人手臂移出其工作空间。
这里的距离是指两个 TCP 位置之间的笛卡尔距离。角度说明两个位置之间 TCP 方向的变化幅
度。更准确地说,是指描述方向变化的旋转矢量的长度。
UR5e 144 用 户 手 册
24.程 序选 项卡
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
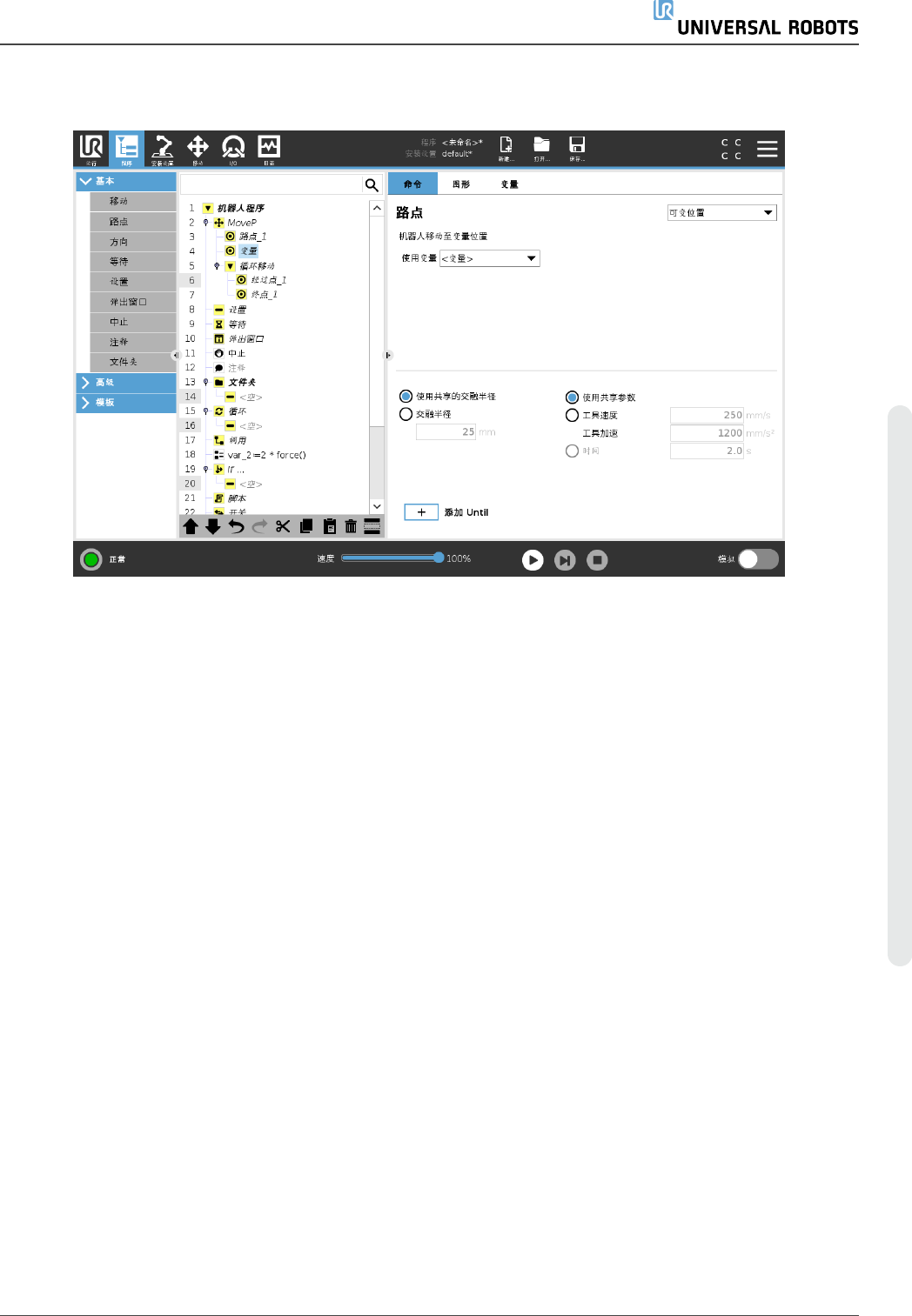
24.10.4. 可变路点
可变路点是指该路点的位置由变量给定,在本例中为 calculated_pos。变量必须是一个
位姿
,
例如
var=p[0.5,0.0,0.0,3.14,0.0,0.0]。前三个数字表示
x,y,z
坐标,后三个数字表示由矢量
rx,ry,rz
给定
的
旋转矢量
的方向。轴长是指要旋转的角度,以弧度表示,矢量本身给定了要绕之旋转的轴。
位置始终是相对于参考框架或坐标系给定的,由所选特征定义。如果交融半径设置在一个固
定的路点上且之前和之后的路点为可变路点,或者交融半径设置在可变路点上,将不会检查
交融半径是否重叠( 请参阅交融参数 在本页140) 。如果在程序运行时交融半径重叠了一个路
点,则机器人会忽略它并移动到一下个路点。
例如,将机器人沿着工具的 z 轴移动 20
mm
:
var_1=p[0,0,0.02,0,0,0]
Movel
Waypoint_1 (variable position):
Use variable=var_1, Feature=Tool
24.10.5. 方向
程序节点方向指定相对于特征轴或 TCP 的运动。机器人沿着方向程序节点指定的路径移动,
直到该移动被 Until 条件停止。
用 户 手 册 145 UR5e
24.程 序选 项卡
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
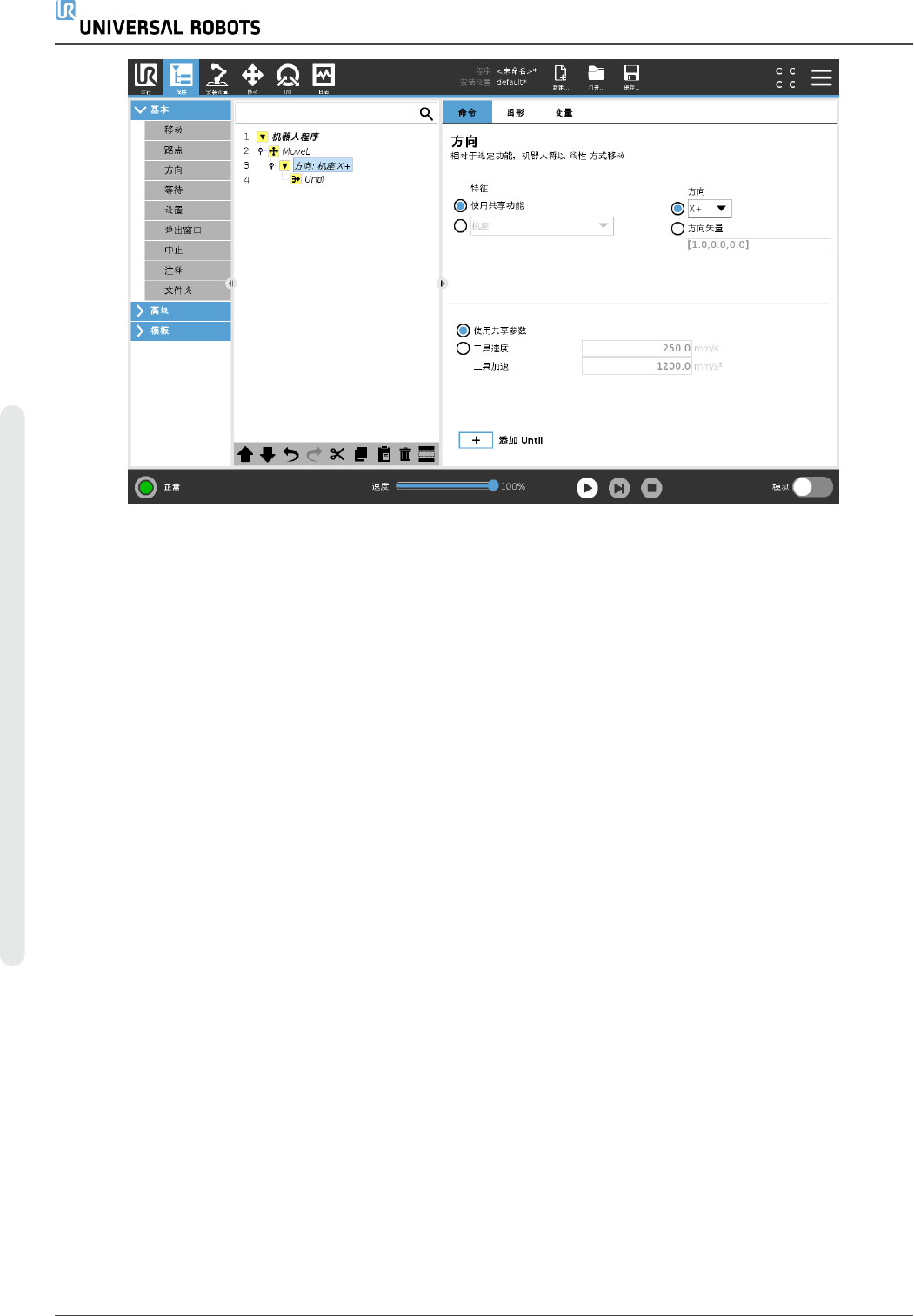
添 加 方 向 移 动
1. 在“基本”下,点按方向,向程序树中添加一个线性移动。
2. 在方向字段中的“特征”下,定义线性移动。
停 止 方 向 移 动
1. 在“方向”字段中,点按添加 Until 按钮,以定义停止条件并将其添加到程序树。
您可为工具速度和工具加速度添加方向矢量设置,以定义线性运动的矢量方向,从而允许以
下高级用例:
• 定义相对于多个特征轴的线性运动
• 将方向计算为数学表达式
方向矢量定义了一个被解析为单位矢量的自定义代码表达式。例如,[100,0,0]和[1,0,0]的方向
矢量对机器人具有完全相同的效果;使用速度滑动器按所需速度沿x轴移动。方向矢量中的数
字值仅相对于彼此。
24.10.6. Until
程序节点 Until 定义运动的停止条件。机器人沿着路径移动并在检测到接触时停止。在“程序
树”中,您可以在“方向节点”和“路点节点”下添加“直到节点”。您可以为单个动作添加多个停止
标准。满足第一个 Until 条件时,运动停止。
UR5e 146 用 户 手 册
24.程 序选 项卡
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。