99419_UR5e_User_Manual_zh_Global.pdf - 第161页
在 U nt i l 字 段 中 , 可 以 定 义 以 下 停 止 条 件 : • 距 离 当 机 器 人 移 动 一 定 距 离 时 , 此 节 点 可 用 于 停 止 方 向 移 动 。 速 度 降 低 , 因 此 机 器 人 在 距 离 处 停 止 。 • 工 具 接 触 ( 请 参 阅 24.1 0.7. 直 到 - 工 具 接 触 向 下 ) 当 机 器 人 工 具 检 测 到 接 触 时 , 可 以 使 用 此 节 点 来…
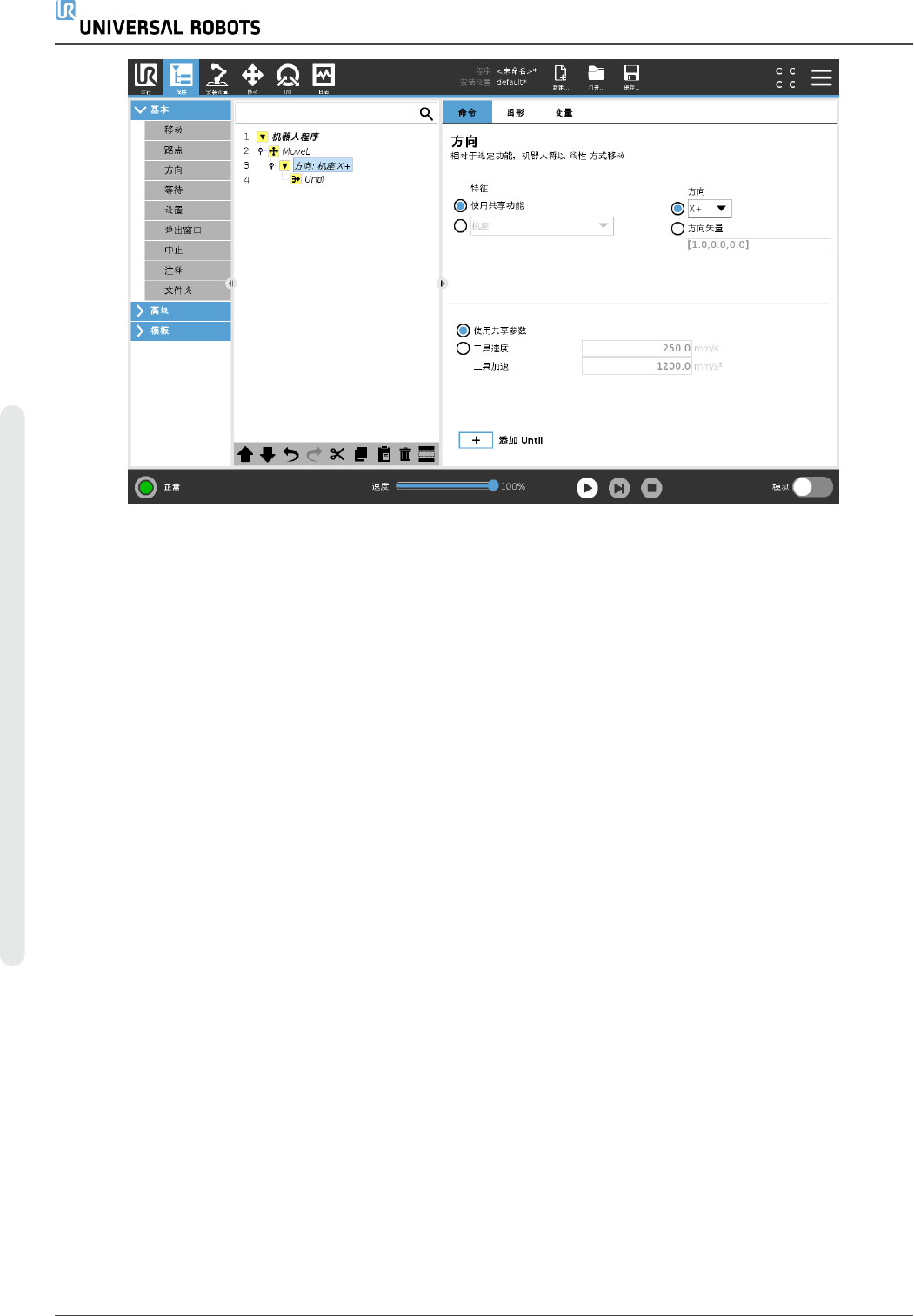
添 加 方 向 移 动
1. 在“基本”下,点按方向,向程序树中添加一个线性移动。
2. 在方向字段中的“特征”下,定义线性移动。
停 止 方 向 移 动
1. 在“方向”字段中,点按添加 Until 按钮,以定义停止条件并将其添加到程序树。
您可为工具速度和工具加速度添加方向矢量设置,以定义线性运动的矢量方向,从而允许以
下高级用例:
• 定义相对于多个特征轴的线性运动
• 将方向计算为数学表达式
方向矢量定义了一个被解析为单位矢量的自定义代码表达式。例如,[100,0,0]和[1,0,0]的方向
矢量对机器人具有完全相同的效果;使用速度滑动器按所需速度沿x轴移动。方向矢量中的数
字值仅相对于彼此。
24.10.6. Until
程序节点 Until 定义运动的停止条件。机器人沿着路径移动并在检测到接触时停止。在“程序
树”中,您可以在“方向节点”和“路点节点”下添加“直到节点”。您可以为单个动作添加多个停止
标准。满足第一个 Until 条件时,运动停止。
UR5e 146 用 户 手 册
24.程 序选 项卡
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
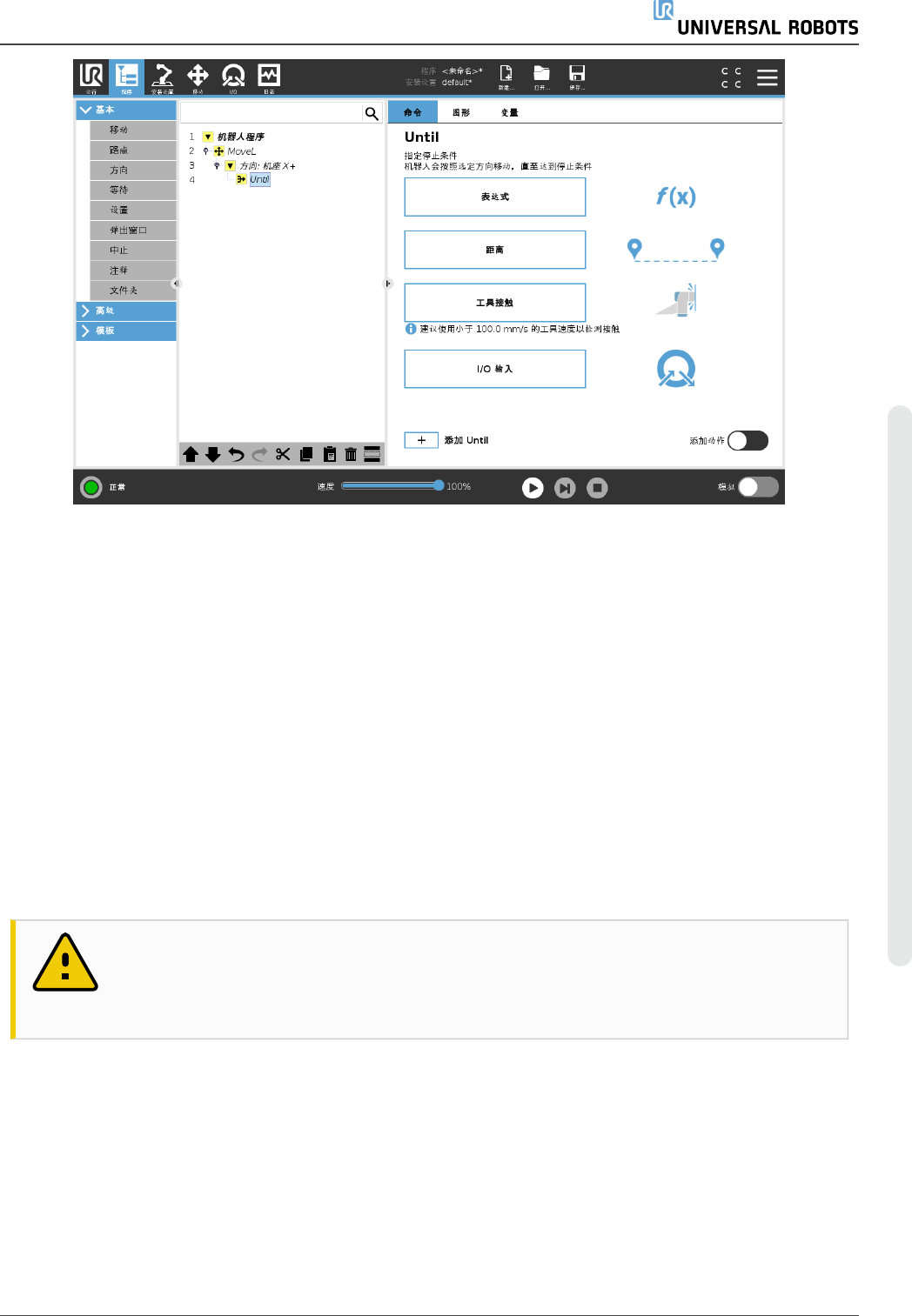
在 Until 字段中,可以定义以下停止条件:
• 距离 当机器人移动一定距离时,此节点可用于停止方向移动。速度降低,因此机器人在
距离处停止。
• 工具接触( 请参阅24.10.7. 直到-工具接触 向下) 当机器人工具检测到接触时,可以使用此
节点来停止移动。
• 表达式 此节点可用于停止由自定义程序表达式引起的运动。您可以使用I/O,变量或脚
本函数来指定停止条件。
• I/O 输入 您可以使用此节点停止 I/O 输入上的信号控制运动。
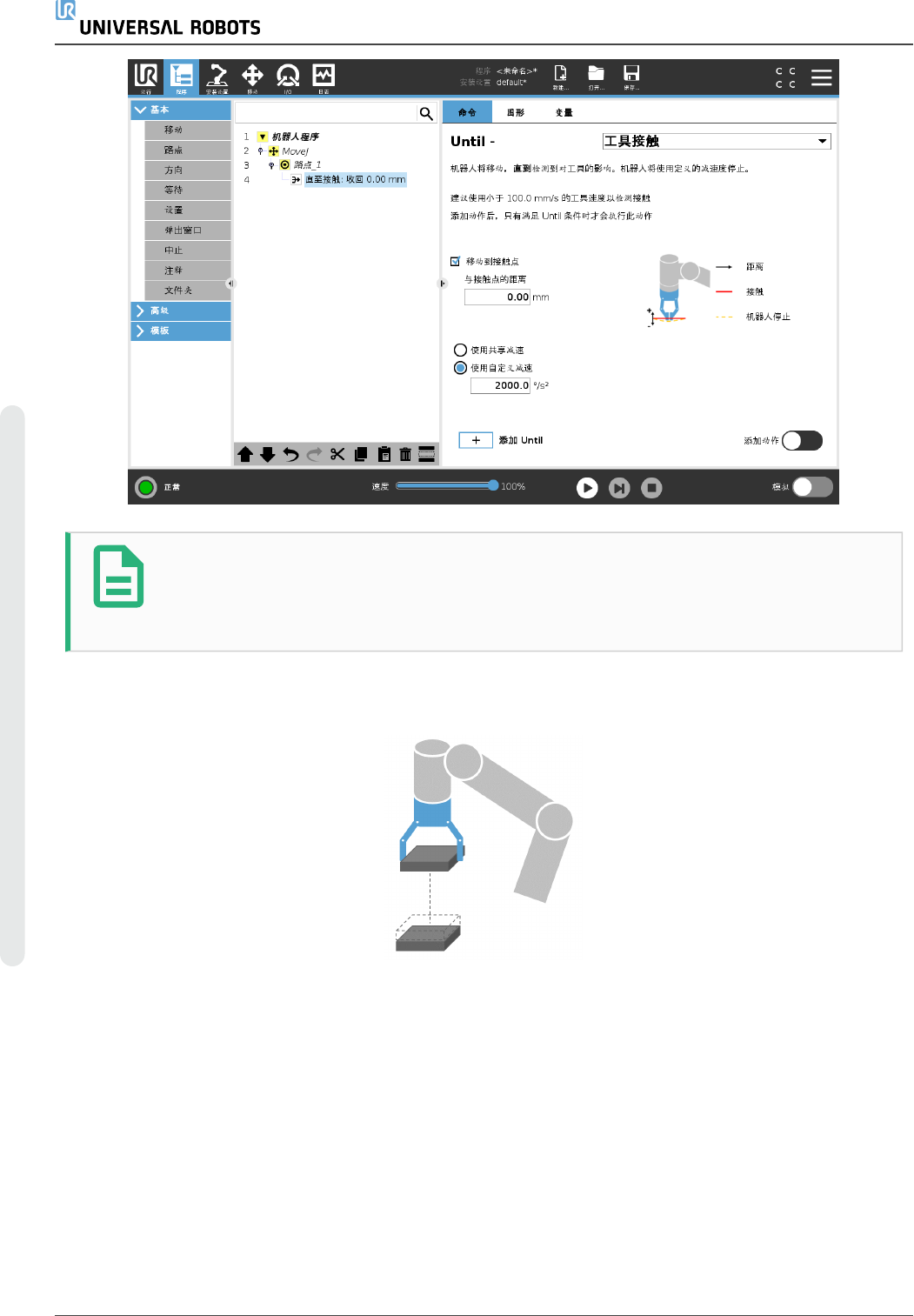
24.10.7. 直到-工具接触
程序节点 Until 工具接触允许机器人在与工具建立接触后停止运动。您可以定义工具停止和撤
销的减速。
小心
默认移动对于接触检测来说太高。在工具接触条件生效之前,较快的移动速度
触发保护性停止。为了避免触发保护性停止,将移动速度降低。例如:100m/s。
用 户 手 册 147 UR5e
24.程 序选 项卡
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
提示
如果已安装的工具震动,直到工具接触可能不工作。例如:一个带有内置泵的
真空抓手可以带来快速震动。
您可以将“直到工具接触”节点用于堆垛/卸垛等应用,其中“直到工具接触”决定堆叠对象的高
度。
撤 销 接 触
使用移动到接触点设置,将机器人返回到初始接触点。您可以设置一个额外的反向移动,使机
器人自由移动或朝向接触移动。如果您有一个需要移动空间的抓手,或如果需要夹紧操作,这
将有用。
操 作 :
如果满足特定的 Until 条件,添加动作允许添加程序节点。例如,直到工具接触可以接合抓手
工具的抓取动作。如果未定义动作,则程序执行将继续至程序树中的下一个程序节点。
UR5e 148 用 户 手 册
24.程 序选 项卡
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。