99419_UR5e_User_Manual_zh_Global.pdf - 第166页
24. 10.13 . 文 件 夹 文 件 夹 用 于 组 织 和 标 记 程 序 的 特 定 部 分 , 以 使 程 序 树 清 晰 明 了 , 让 程 序 更 易 于 查 看 和 导 航 。 文 件 夹 对 程 序 及 其 执 行 没 有 影 响 。 24. 10.14 . 设 置 有 效 载 荷 使 用 设 置 有 效 载 荷 命 令 设 置 机 器 人 手 臂 的 有 效 载 荷 。 如 果 工 具 处 承 受 的 重 量 与 …
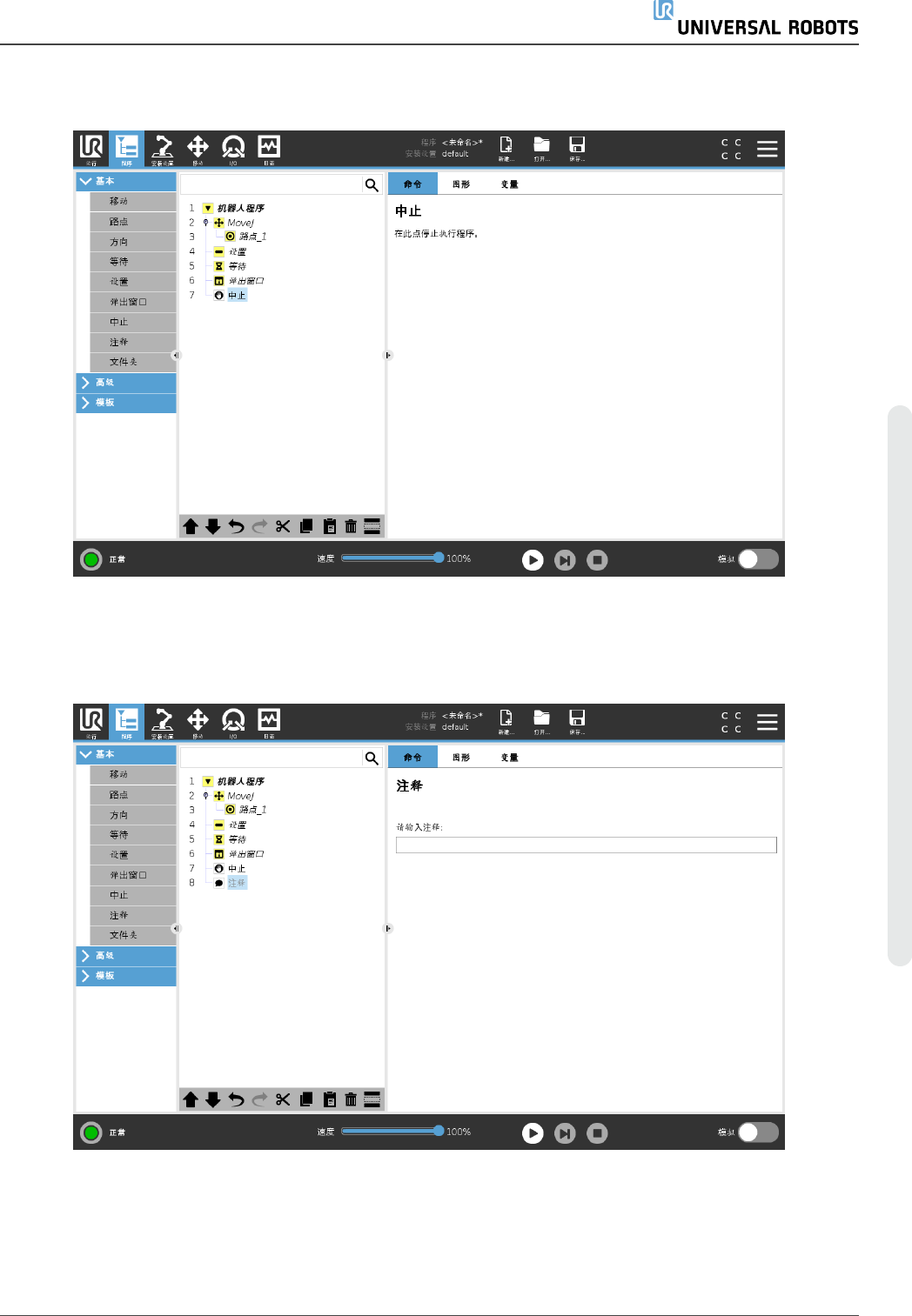
24.10.11. 中止
程序将在该点停止运行。
24.10.12. 注释
此命令允许编程员向程序添加一行文本。程序运行期间,此行文本不会执行任何操作。
用 户 手 册 151 UR5e
24.程 序选 项卡
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
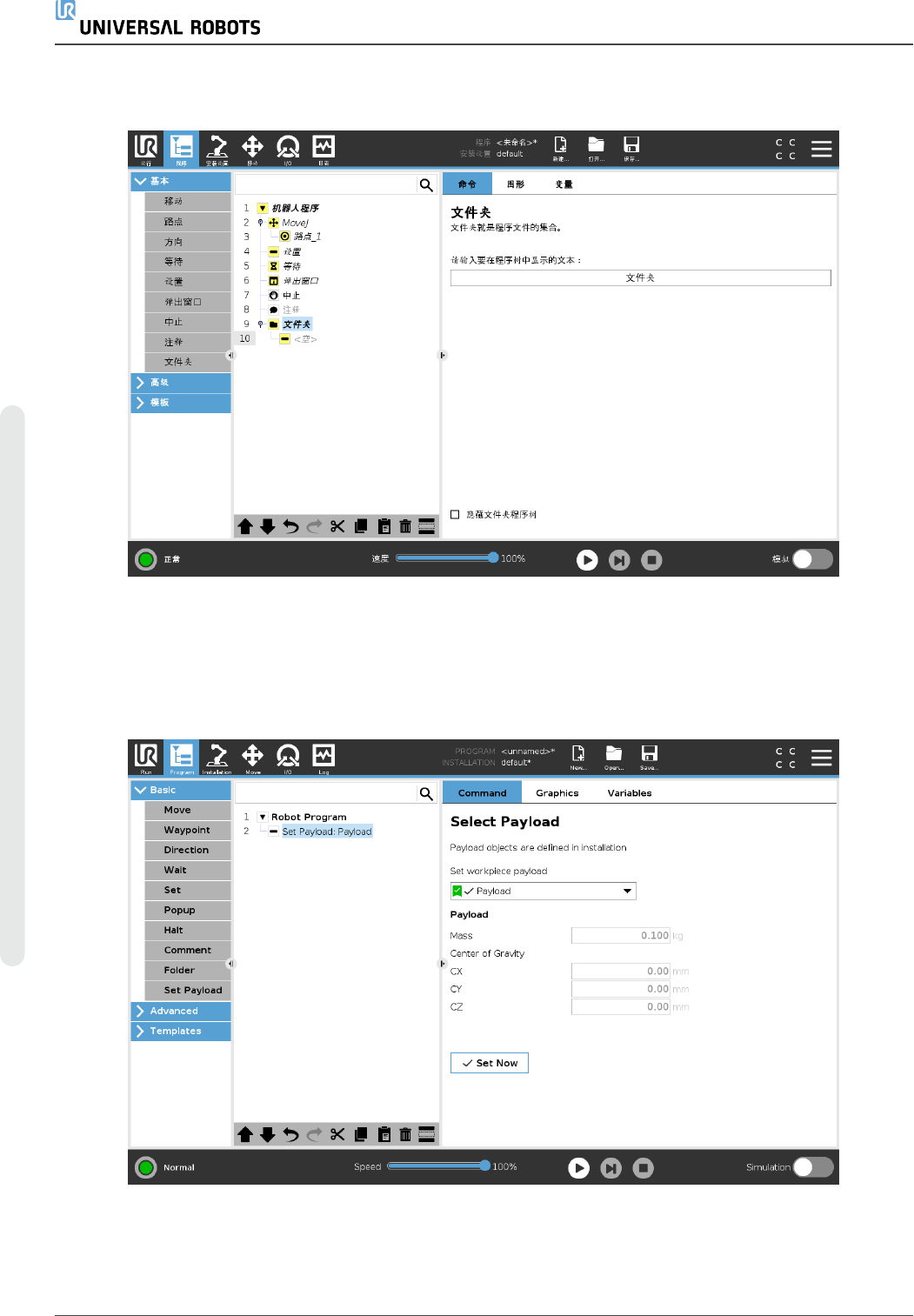
24.10.13. 文件夹
文件夹用于组织和标记程序的特定部分,以使程序树清晰明了,让程序更易于查看和导航。
文件夹对程序及其执行没有影响。
24.10.14. 设置有效载荷
使用设置有效载荷命令设置机器人手臂的有效载荷。如果工具处承受的重量与预期有效负载
不同,您可以调整有效负载重量,以避免触发机器人保护性停止。
UR5e 152 用 户 手 册
24.程 序选 项卡
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
注意
正确设置有效载荷能够确保最佳移动性能并避免保护性停止。
• 在使用抓手拾取和释放物体时设置有效载荷。
要使用“设置有效载荷”命令,您可以:
• 使用选择有效载荷下的下拉菜单,选择安装中已配置的一个有效载荷。
• 或者,使用下拉菜单,通过选择自定义有效载荷并填写重量和 CoG 字段来配置新的有效
载荷。
您也可以使用设置激活按钮,将节点上的值设置为激活的有效载荷。
24.11. 高级程序节点
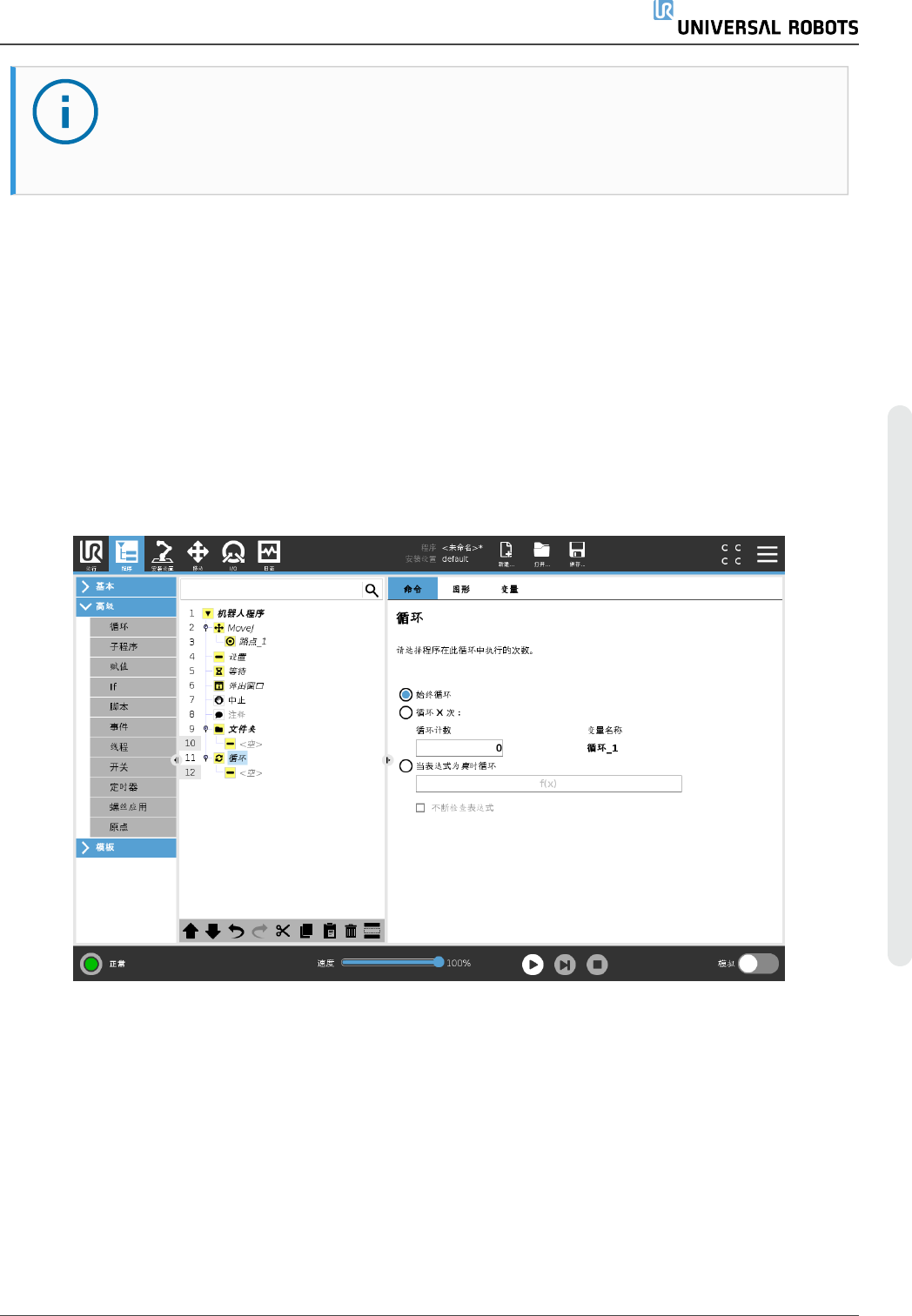
24.11.1. 循环
循环运行基本程序命令。基本程序命令可以无限循环运行,也可以运行指定次数,或者只要给
定条件为真,即持续运行,具体取决于所做选择。循环运行指定次数时,将创建一个专用的循
环变量( 即上面截屏中所谓的 loop_1) ,此变量可用于循环内的表达式中。循环变量从 0 开始
计数,直至
N
− 1。
当循环命令使用表达式作为结束条件时,PolyScope 提供了一个用于连续评估该表达式的选
项,以便“循环”可以在执行期间随时中断,而不是只在每次迭代后中断。
24.11.2. If
If and If...Else 语句可根据传感器输入或变量值来改变机器人的行为。
用 户 手 册 153 UR5e
24.程 序选 项卡
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。