99419_UR5e_User_Manual_zh_Global.pdf - 第180页
码 垛 卸 垛 要 为 查 找 操 作 编 程 , 请 定 义 以 下 内 容 : • A - 起 点 。 • B 到 C - 码 垛 方 向 。 这 意 味 着 码 垛 时 增 加 堆 垛 , 卸 垛 时 减 少 堆 垛 。 • D - 码 垛 工 件 的 厚 度 。 您 还 必 须 定 义 到 达 下 一 个 码 垛 位 置 的 条 件 , 以 及 在 每 个 码 垛 位 置 执 行 的 特 殊 程 序 序 列 。 必 须 给 出 …

5. 重复第3步。
6. 点按设置路点以示教退出路点( 请参阅24.10.1. 移动 在本页136) 。点按下一步。
7. 点按完成。
8. 您现在可以在程序树中的“拾取分离器”、“卸下分离器”和“工具操作”文件夹中添加适当的
操作节点。
( B) 手 动 配 置
1. 点按程序树上的分隔板动作节点。
2. 在分隔板动作开始屏幕上,点按手动配置。
3. 点按移动到分隔板点,将机器人移动到分隔板点。
4. 点按程序树中的接近节点,向机器人示教接近路点( 请参阅24.10.1. 移动 在本页136) 。
5. 点击程序树上的分离器操作节点。重复第3步。
6. 点按程序树中的退出节点,向机器人示教退出路点( 请参阅24.10.1. 移动 在本页136) 。
7. 您现在可以在程序树中的“拾取分离器”、“卸下分离器”和“工具操作”文件夹中添加适当的
操作节点。
选 择 自 定 义 码 垛 程 序
您可以按照下列方法对您的码垛程序进行自定义:
• 如果创建码垛程序之后,您的码垛需要调整或重新定位,只需重新示教码垛特征( 请参
阅25.17. 特征 在本页202) ,因为码垛序列相对于特征是固定的。因此,所有其他程序组
成部分自动调整至新教授的位置。
• 您可以编辑“移动”命令的属性( 请参阅24.10.1. 移动 在本页136) 。
• 您可以更改速度和交融半径( 请参阅24.10.1. 移动 在本页136) 。
• 您可以将其他程序节点添加到“在每个项目\q{序列或”分离器操作}序列。
24.12.2. 探寻
查找功能使用传感器确定抓取或放下工件的正确位置。此功能适用于处理厚度不一的工件堆
垛以及工件的精确位置无从知晓或难以编程的情况。
传感器可以是按钮开关、压力传感器或电容传感器。
用 户 手 册 165 UR5e
24.程 序选 项卡
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
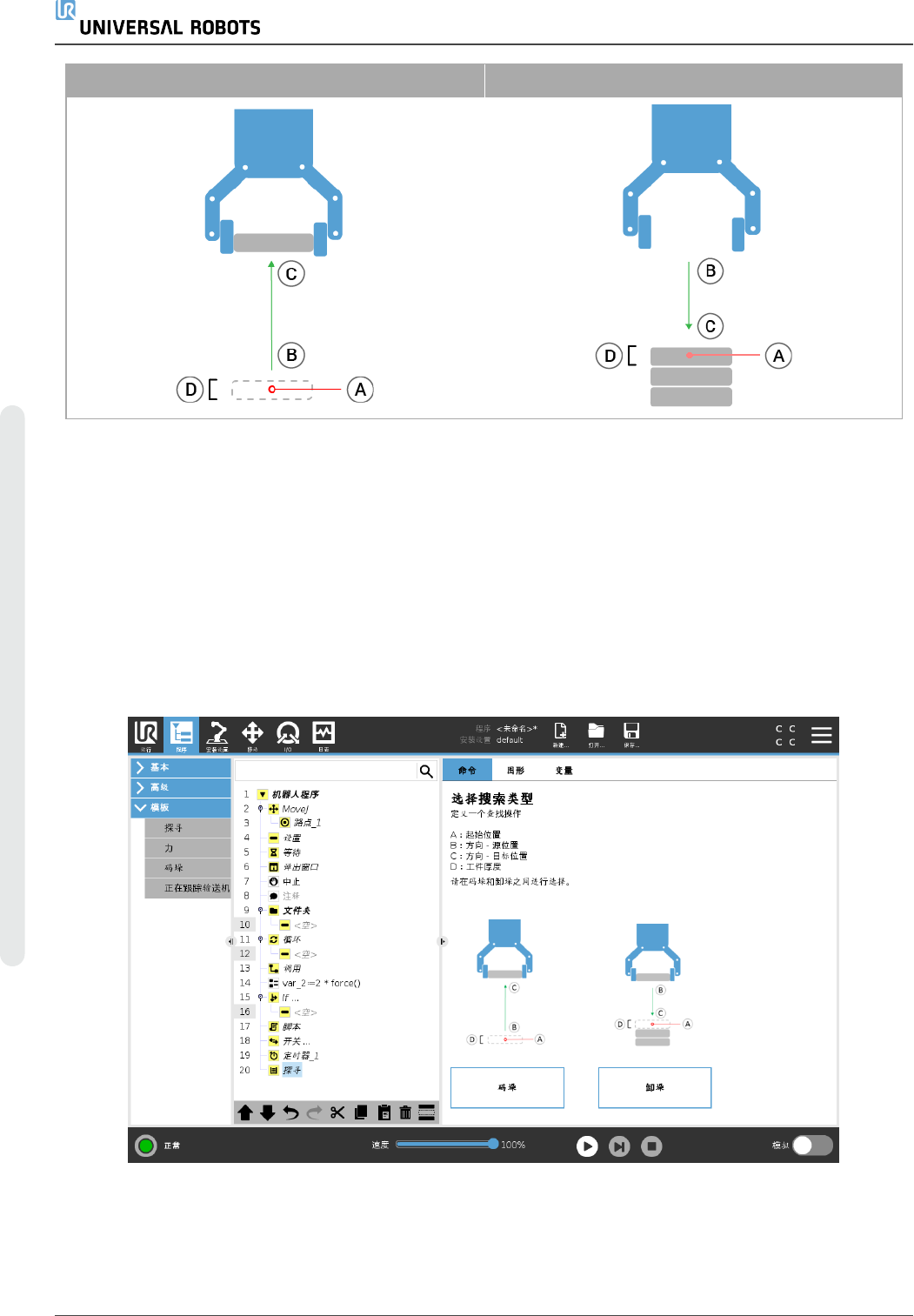
码垛 卸垛
要为查找操作编程,请定义以下内容:
•
A
- 起点。
•
B 到 C
- 码垛方向。这意味着码垛时增加堆垛,卸垛时减少堆垛。
•
D
- 码垛工件的厚度。
您还必须定义到达下一个码垛位置的条件,以及在每个码垛位置执行的特殊程序序列。
必须给出码垛操作中所涉及的运动的速度和加速度。
码 垛
码垛过程中,机器人手臂将移至
A
,然后
反
向移动以搜索下一个码垛位置。当找到下一个码垛
位置时,机器人会记住位置并执行特殊序列。
在后续的轮次中,机器人从记住的位置开始搜索,并沿方向增加工件的厚度。
UR5e 166 用 户 手 册
24.程 序选 项卡
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
当码垛高度超出所定义的数值时,或者传感器发送信号时,表示码垛操作完成。
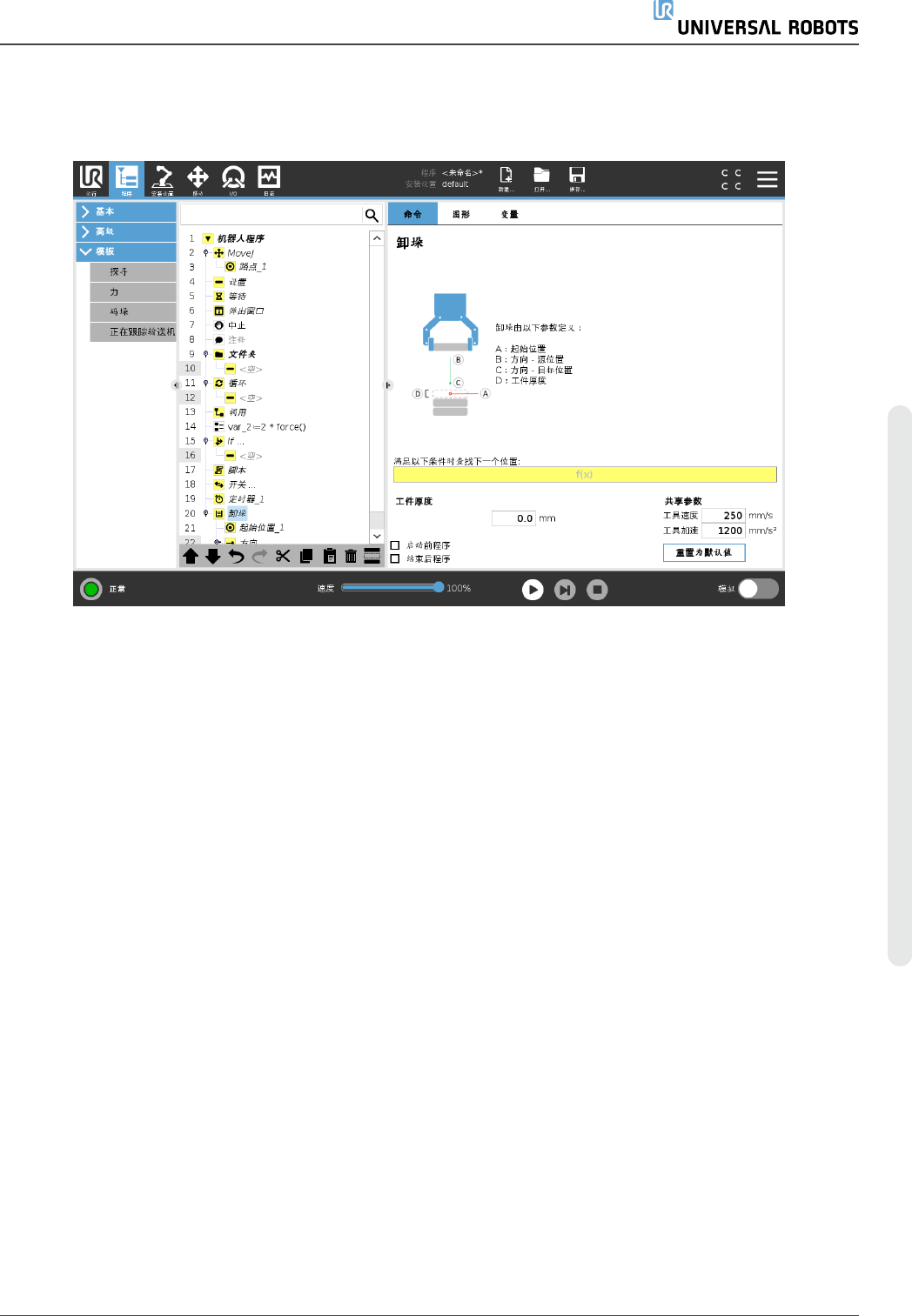
卸 垛
卸垛过程中,机器人手臂从
A
点沿着指定方向移动,搜索下一工件。屏幕上的条件决定何时到
达下一工件。当条件满足时,机器人会记住位置并执行特殊序列。
在后续的轮次中,机器人从记住的位置开始搜索,并沿方向增加工件的厚度。
起 始 位 置
起始位置是指开始执行堆垛操作的位置。如果省略了起始位置,则码垛操作将从机器人手臂
的当前位置开始。
用 户 手 册 167 UR5e
24.程 序选 项卡
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。