99419_UR5e_User_Manual_zh_Global.pdf - 第197页
5. 如 果 要 将 不 同 的 值 应 用 于 “ 工 具 路 径 ” 节 点 , 请 调 整 运 动 参 数 。 6. 点 按 移 动 到 第 一 个 点 以 确 认 工 具 可 以 移 动 到 工 具 路 径 的 第 一 个 点 。 7. 以 低 速 在 仿 真 模 式 下 测 试 程 序 以 确 认 配 置 是 正 确 的 。 提 示 在 执 行 工 具 路 径 之 前 , 通 过 添 加 Mov eJ 并 将 使 用 关 节 …
配 置 和 导 入 工 具 路 径 文 件
这与配置工具路径( 请参阅使用 CAD/CAM 软件配置工具路径 在本页178) 和导入工具路径( 请
参阅 将G代码工具路径导入PolyScope在本页178) 相似。
配 置 常 规 TCP
• 请按照25.2. TCP 配置 在本页185中的说明配置常规 TCP 。
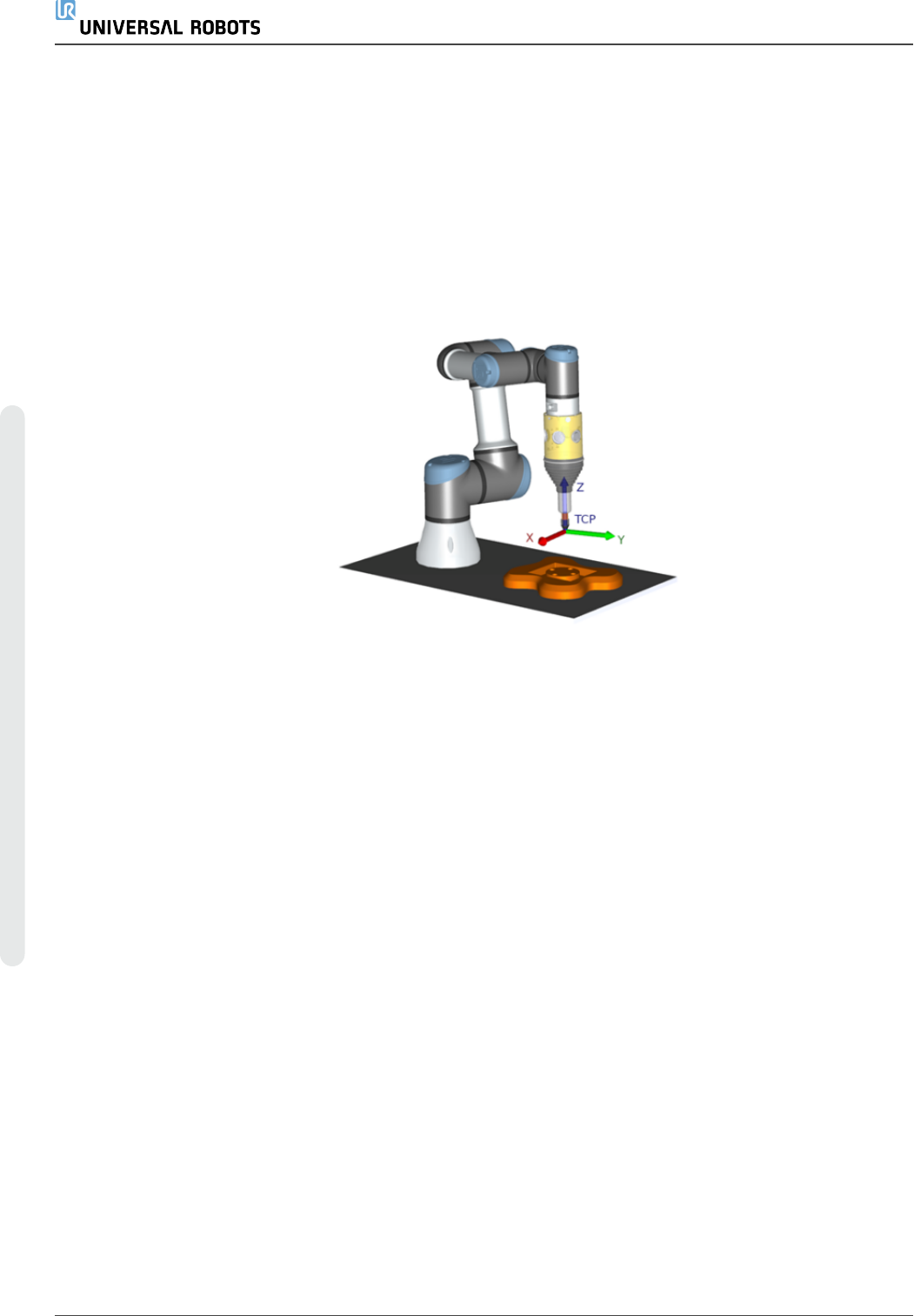
• 确认工具的Z轴正点远离零件表面。
配 置 平 面 特 征 PCS
1. 通过添加平面或示教平面来创建平面特征。请参阅25.17.5. 平面特征 在本页205.
2. 将零件固定在相对于机器人底座的位置。
3. 验证TCP是否正确,可用于创建平面功能。为了获得高精度,请临时设置一个清晰的远
程TCP以完成此教学过程。
4. 慢慢移动机器人使Remote TCP接触零件上PCS的原点、正 X-轴和正 Y-轴方向。
5. 完成教学过程,并确认PCS的位置和方向。
设 置 工 具 路 径 节 点
1. 访问“程序”选项卡并点按 URCap。
2. 选择一个 TCP 并设置运动参数:工具速度,工具加速和交融半径。选择使工具绕着 Z 轴
自由旋转。如果工具必须遵循工具路径文件中定义的绕Z轴的方向,则不要选择旋转工
具。
3. 点按 +Toolpath 插入一个工具路径节点。
4. 在下拉菜单中,选择一个工具路径文件和相应的PCS( 平面特征) 。
UR5e 182 用 户 手 册
24.程 序选 项卡
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
UR5e 184 用 户 手 册
24.程 序选 项卡
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。