99419_UR5e_User_Manual_zh_Global.pdf - 第198页
U R5e 1 8 4 用 户 手 册 2 4 . 程 序 选 项 卡 版 权 所 有 © 2 009–2021U ni ver s al R obots A/S 。 保 留 所 有 权 利 。
UR5e 184 用 户 手 册
24.程 序选 项卡
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
25.安装设置选项卡
25.1. 一般
“安装设置”选项卡可以配置影响机器人和 PolyScope 整体性能的设置。
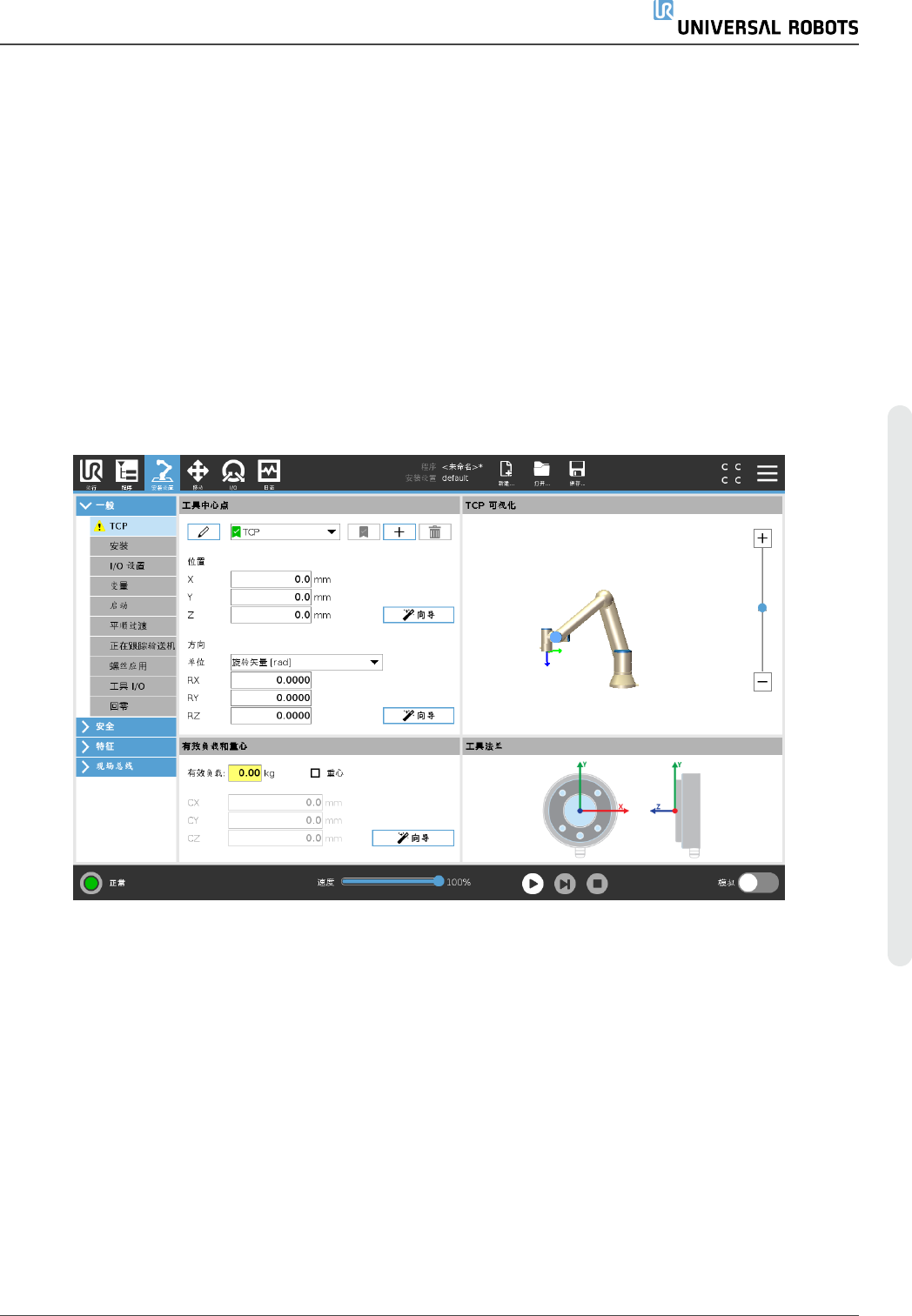
25.2. TCP 配置
工具中心点 (TCP) 是机器人工具上的一个点。每个 TCP 都包含相对于工具输出法兰中心而设
定的转换和旋转。
当编程返回到先前存储的路点时,机器人将 TCP 移动到路点内保存的位置和方向。当为线性
运动编程时,TCP 以线性方式移动。
25.2.1. 位置
X、Y 和 Z 坐标指定 TCP 位置。当所有值( 包括方向) 均为零时,TCP 与工具输出法兰的中心点
重合,并应用屏幕显示的坐标体系。
25.2.2. 方向
RX、RY、RZ 坐标框制定TCP位置。与“移动”选项卡类似,使用 RX、RY、RZ 框上方的“单位”下
拉菜单可选择方向坐标( 请参阅26.5. 位姿编辑器屏幕 在本页217) 。
25.2.3. 添加、重命名、修改和删除 TCP
您可以通过以下操作开始配置新的 TCP:
用 户 手 册 185 UR5e
25.安 装设 置选 项卡
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。