99419_UR5e_User_Manual_zh_Global.pdf - 第201页
即 使 通 常 只 要 三 个 位 置 便 足 可 确 定 TC P , 但 仍 然 需 要 使 用 第 四 个 位 置 来 进 一 步 验 证 计 算 结 果 正 确 。 每 个 为 计 算 所 得 TC P 保 存 的 点 的 质 量 通 过 相 应 按 钮 上 的 LED 为 绿 色 、 黄 色 还 是 红 色 来 指 示 。 25. 2.5. 示 教 TCP 方 向 1. 点 按 测 量 。 2. 从 下 拉 列 表 中 选 择…
•
点按 使用唯一名称定义新 TCP。新 TCP 显示在下拉菜单中。
•
点按 重命名 TCP。
•
点按 移除选定的 TCP。不能移除最后一个 TCP。
主 动 TCP
当进行线性移动时,机器人总是使用激活TCP定义TCP偏移量。可以使用一个“移动”命令( 请
参阅24.10.1. 移动 在本页136) 或“设置”命令更改激活的 TCP。激活的 TCP 的运动会显示在“图
形”选项卡( 请参阅24.8. 图形选项卡 在本页135) 上。
默 认 的 TCP
运行一个程序前,必须按照激活TCP设置默认TCP。
• 选择所需的 TCP,点按设为默认将 TCP 设置为默认 TCP。
可用下拉菜单中的绿色图标表示默认配置的TCP
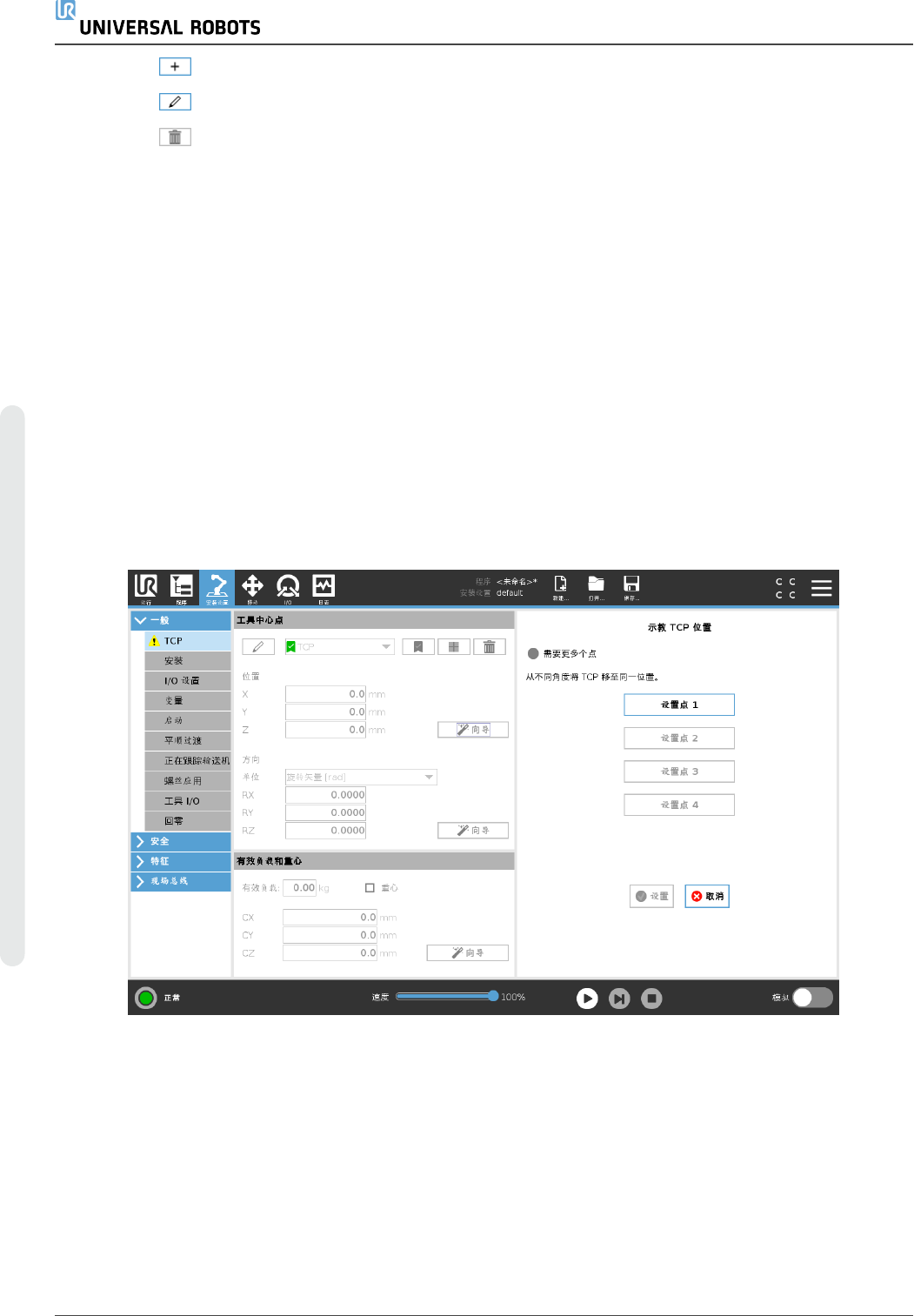
25.2.4. 示教 TCP 位置
TCP 位置坐标可通过以下步骤自动计算:
1. 点按测量。
2. 在机器人工作空间中选择一个固定的点。
3. 使用屏幕右侧的位置箭头从至少三个不同角度移动 TCP,并保存工具输出法兰的相应
位置。
4. 使用设置按钮将验证的坐标应用于合适的 TCP。这些位置必须足够多样化,以确保计算
结果正确。如果它们不够多样化,按钮上方的状态 LED 将变为红色。
UR5e 186 用 户 手 册
25.安 装设 置选 项卡
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
即使通常只要三个位置便足可确定 TCP,但仍然需要使用第四个位置来进一步验证计算结果
正确。每个为计算所得 TCP 保存的点的质量通过相应按钮上的 LED 为绿色、黄色还是红色来
指示。
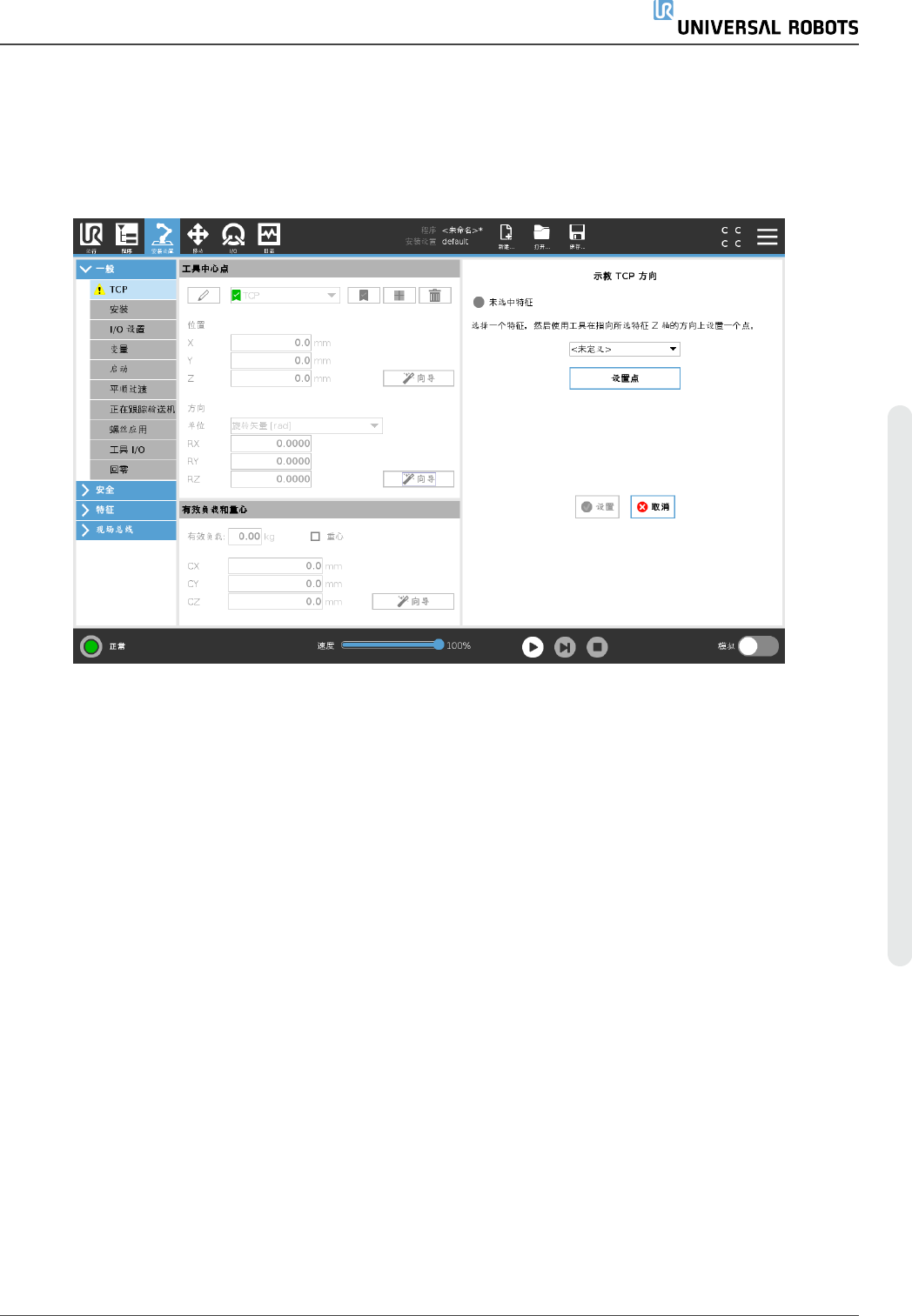
25.2.5. 示教 TCP 方向
1. 点按测量。
2. 从下拉列表中选择一个特征。有关定义新特征的更多信息,请参阅25.17. 特征 在本页
202。
3. 点按设置点并使用移动工具箭头移动到工具的方向和相应的 TCP 与所选特征的坐标系
重合的位置。
4. 验证计算的 TCP 方向,并点按设置将其应用于所选 TCP。
25.3. 有效载荷
您必须设置有效载荷、CoG 和惯量,才能使机器人发挥最佳性能。
您可以定义多个有效载荷,并在程序中切换。这在“抓取和放置”应用中十分有用,在这种应用
中,机器人会抓取和释放物体。
用 户 手 册 187 UR5e
25.安 装设 置选 项卡
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
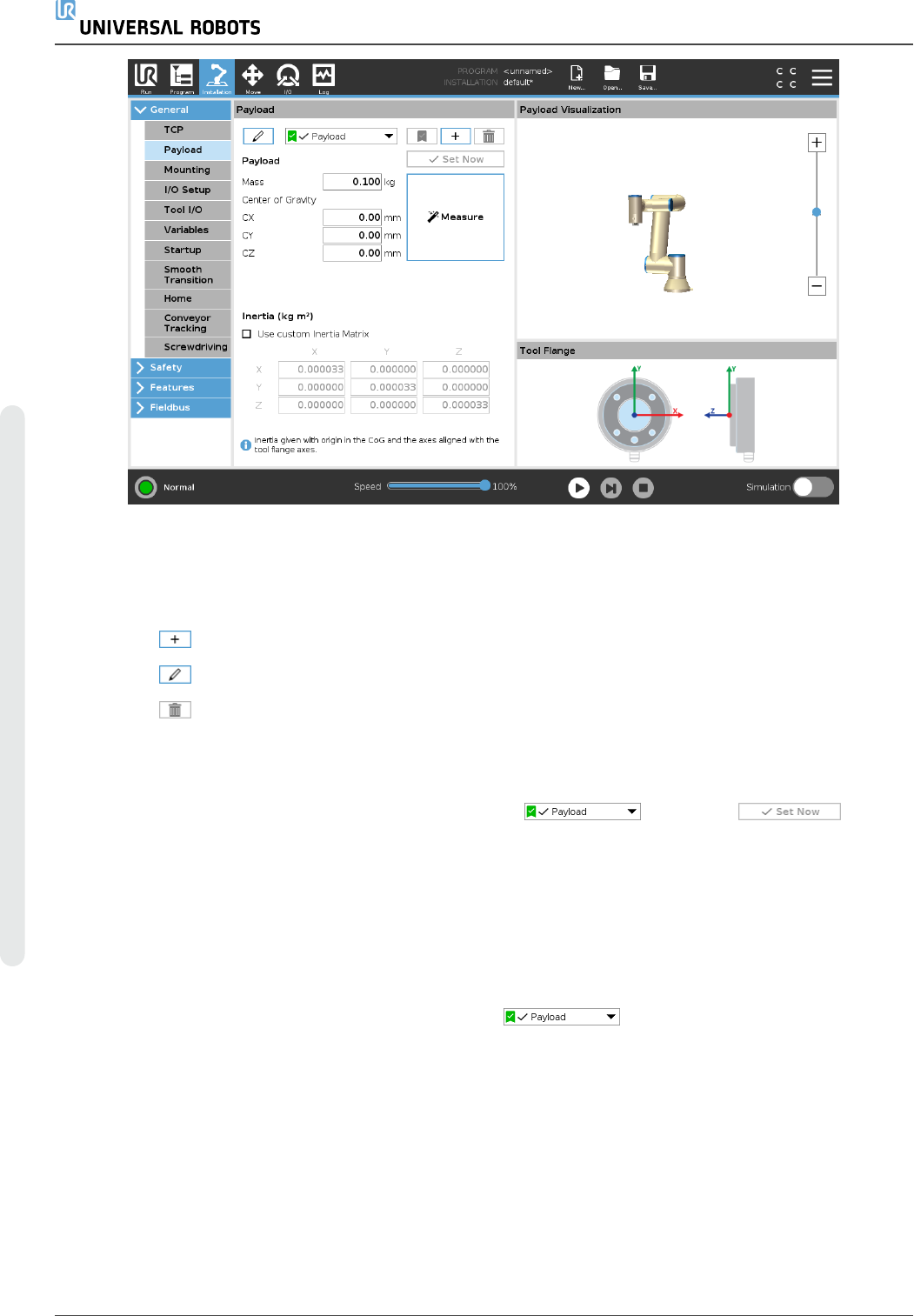
25.3.1. 添加、重命名、修改和移除有效载荷
您可以通过以下操作开始配置新的有效载荷:
•
点按 使用唯一名称定义新的有效载荷。新的有效载荷显示在下拉菜单中。
•
点按 重命名有效载荷。
•
点按 移除选定的有效载荷。不能移除最后一个有效载荷。
激 活 的 有 效 负 载
下拉菜单中的复选标记指示哪个有效载荷是激活的 。可以使用 更改激
活的有效载荷。
默 认 有 效 载 荷
在程序启动之前,将默认有效载荷设置为激活的有效载荷。
• 选择所需的有效载荷,点按设为默认将有效载荷设置为默认值。
下拉菜单中的绿色图标指示默认配置的有效载荷 。
25.3.2. 设置重心
点按字段 CX、CY 和 CZ 可设置重心。这些设置适用于选定的有效载荷。
25.3.3. 有效载荷估计
此功能允许机器人帮助设置正确的有效载荷和重心 (CoG)。
UR5e 188 用 户 手 册
25.安 装设 置选 项卡
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。