99419_UR5e_User_Manual_zh_Global.pdf - 第211页
设 置 ) 。 这 可 与 GND 引 脚 结 合 使 用 以 形 成 完 整 电 路 。 当 输 出 关 闭 时 , 引 脚 允 许 电 流 流 向 地 面 。 选 择 一 个 新 的 输 出 设 置 后 , 变 更 立 即 生 效 。 当 前 加 载 的 安 装 也 相 应 修 改 , 以 反 映 新 的 设 置 。 验 证 工 具 输 出 符 合 预 期 之 后 , 务 必 保 存 安 装 以 避 免 变 更 丢 失 。 25. …
25.9. I/O 接口控制
I/O 接口控制允许您在用户控制和 URcap 控制之间切换。
1. 点按“安装设置”选项卡,然后在“一般”下,点按工具 I/O
2. 在 I/O 接口控制下,选择用户,以访问“工具模拟输入”和/或“数字输出模式”设置。选择
URCap将删除对工具模拟输入和数字输出模式设置的访问。
提示
如果一个URCap控制一个末端执行器,如夹持器,则URCap需要控制工具IO界
面。选择列表中的URCap,允许其控制工具IO界面。
25.10. 工具模拟输入
25.10.1. 工具通信接口
工具通信接口 (TCI) 使机器人可以通过机器人工具模拟输入与连接的工具进行通信。这消除
了对外部布线的需要。
一旦工具通信接口被启用,所有的工具模拟输入都不可用。
25.10.2. 设置工具通信接口( TCI)
1. 点按“安装设置”选项卡,然后在“一般”下,点按工具 I/O.
2. 选择通信接口以编辑 TCI 设置。
启用 TCI 后,工具模拟输入不可用于安装的 I/O 设置,并且不会出现在输入列表中。工具
模拟输入也不可用于等待选择和表达式。
3. 从“通信接口”的下拉菜单中,选择所需的值。
值的任何变化都会立即发送到该工具。如果任何安装值与工具使用的值不同,会出现一
个警告。
25.11. 数字输出模式
工具通信接口可以单独设置两个数字输出。在 PolyScope 中,每一针都有一个用于设置输出模
式的下拉菜单。可选择的选项包括:
• 下沉:允许在 NPN 或下沉配置中配置引脚。输出关闭时,针允许电流流向地面。这可与
PWR 引脚结合使用以形成完整电路。请参见 硬件安装手册中的第五章。
• 寻源:允许在 PNP 或寻源配置中配置引脚。输出开启时,针提供正电压来源( 可在 IO 选
项卡中设置) 。这可与 GND 引脚结合使用以形成完整电路。
• 推/拉:允许在推/拉配置中配置引脚。输出开启时,针提供正电压来源( 可在 IO 选项卡中
UR5e 196 用 户 手 册
25.安 装设 置选 项卡
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
设置) 。这可与 GND 引脚结合使用以形成完整电路。当输出关闭时,引脚允许电流流向
地面。
选择一个新的输出设置后,变更立即生效。当前加载的安装也相应修改,以反映新的设置。验
证工具输出符合预期之后,务必保存安装以避免变更丢失。
25.11.1. 双引脚功率
双针电源用于为工具供电。启用双针电源即禁用默认的工具数字输出。
25.12. 安全模式之间的平顺过渡
在事件过程中,当在安全模式之间切换时( 即缩减模式输入、缩减模式触发平面、防护停止和
3 档位使动装置) ,机器人手臂打算使用 0.4 秒来创建“软”过渡。现有应用程序具有与“硬”设置
相对应的不变行为。新安装文件默认为“软”设置。
25.12.1. 调整加速/减速设置
1. 在页眉中,点按安装设置。
2. 在左侧边栏菜单的一般下,选择平顺过渡。
3. 选择硬可获得更高的加速度/减速度
,选择软可获得更平顺的默认过渡设置。
25.13. 原点
用 户 手 册 197 UR5e
25.安 装设 置选 项卡
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
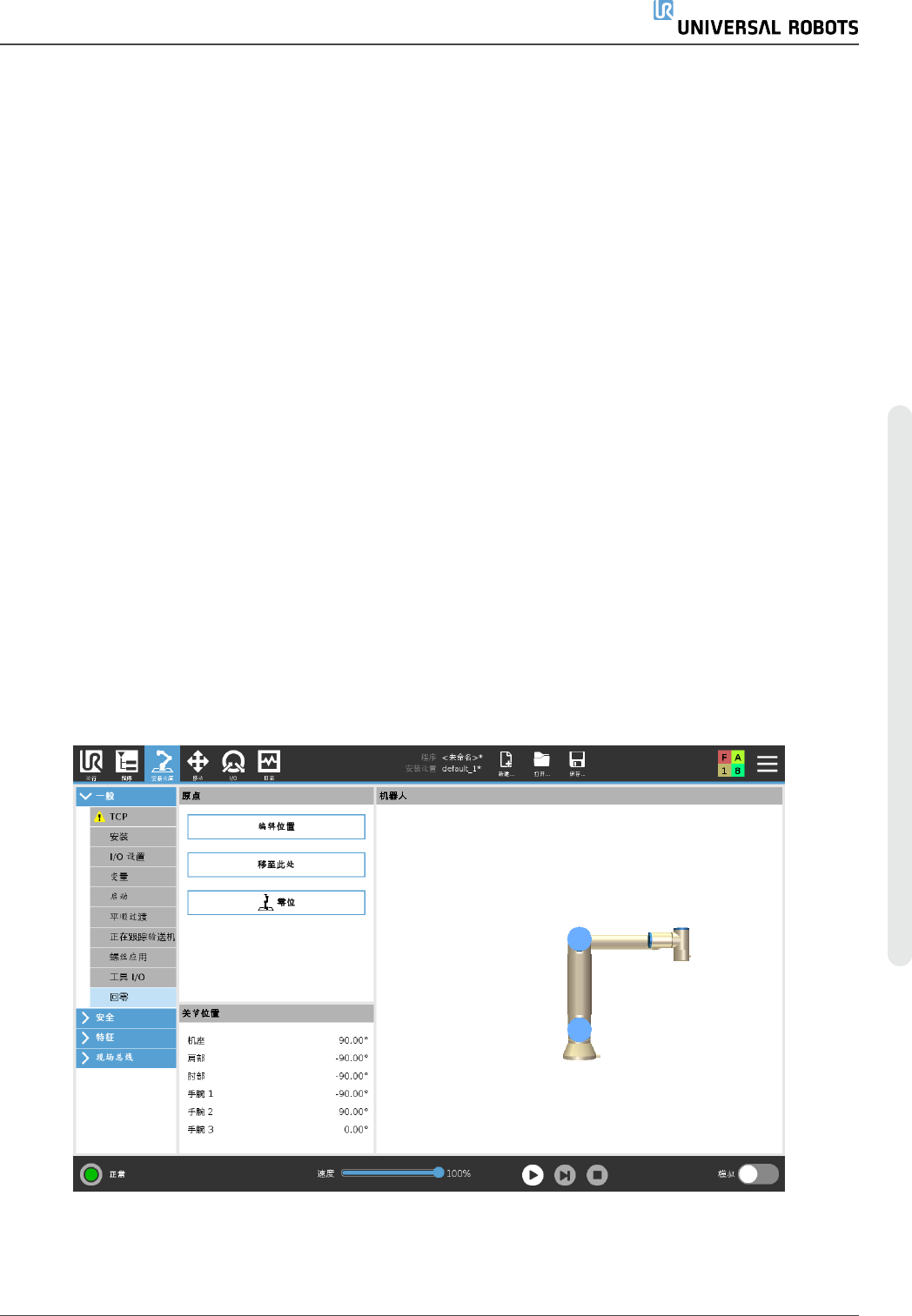
回零是用户定义的机器人手臂的返回位置。定义之后,回零位置在创建机器人程序时可用。您
可以使用“原点”定义安全原点。( 请参阅22.18. 安全回零位置 在本页122) 使用“原点”屏幕按钮
可进行以下操作:
• 编辑位置可修改原点。
• 移至此处可将机器人手臂移动到定义的原点。
• 零位可使机器人手臂回到直立位置。
25.13.1. 定义回零
1. 在页眉中,点按安装设置。
2. 在一般下,选择回零。
3. 点按设置位置。
4. 使用自由驱动或过渡按钮示教机器人。
25.14. 输送机跟踪设置
“输送机跟踪设置”可以对最多 2 台输送机的移动进行配置。输送机跟踪设置提供配置机器人
的选项,使其与绝对或增量式编码器以及线性或圆形输送机一起工作。
25.14.1. 定义输送机
1. 点击页眉的安装。
2. 在“一般”下,选择输送机跟踪。
3. 在“输送机跟踪设置”下的下拉列表中选择输送机 1 或输送机 2。
一次只能定义一台输送机。
4. 选择启用输送机跟踪
5. 配置输送机参数( 25.14.2. 输送机参数 向下一节) 和跟踪参数( 25.14.3. 跟踪参数 向下一
节) 。
25.14.2. 输送机参数
增量式
编码器可以连接到数字输入 数字信号的解码以 40kHz 的频率运行。利用正交编码器( 需要
两个输入) ,机器人可以确定输送机的速度和方向。如果输送机的方向恒定,可利用单个输
入端检测用于确定输送机速度的
上升沿
、
下降沿
或
上升和下降沿
。
绝对式
编码器可以通过 MODBUS 信号连接。这需要预先配置一个数字 MODBUS 输出寄存器
( 25.19. MODBUS 客户端 I/O 设置 在本页211一节) 。
25.14.3. 跟踪参数
线性输送机
UR5e 198 用 户 手 册
25.安 装设 置选 项卡
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。