99419_UR5e_User_Manual_zh_Global.pdf - 第221页
13. 4 : 通 过 更 改 特 征 手 动 更 新 与 某 个 平 面 特 征 相 关 的 四 个 路 点 的 简 单 程 序 应 用 需 要 将 程 序 重 新 用 于 多 个 机 器 人 安 装 , 其 中 只 有 桌 子 的 位 置 略 有 不 同 。 相 对 于 桌 子 的 移 动 相 同 。 通 过 在 安 装 设 置 中 将 桌 子 的 位 置 定 义 为 特 征 P1 , 只 要 用 桌 子 的 实 际 位 置 更 新…
13.4:
通过更改特征手动更新与某个平面特征相关的四个路点的简单程序
应用需要将程序重新用于多个机器人安装,其中只有桌子的位置略有不同。相对于桌子的移
动相同。通过在安装设置中将桌子的位置定义为特征
P1
,只要用桌子的实际位置更新安装设
置,就可以很容易地将包含相对于平面配置的
MoveL
命令的程序应用到其他机器人上。
该概念适用于应用中的一些特征,以实现可以在许多机器人上解决相同任务的灵活程序,即
使工作空间中因安装而有所不同。
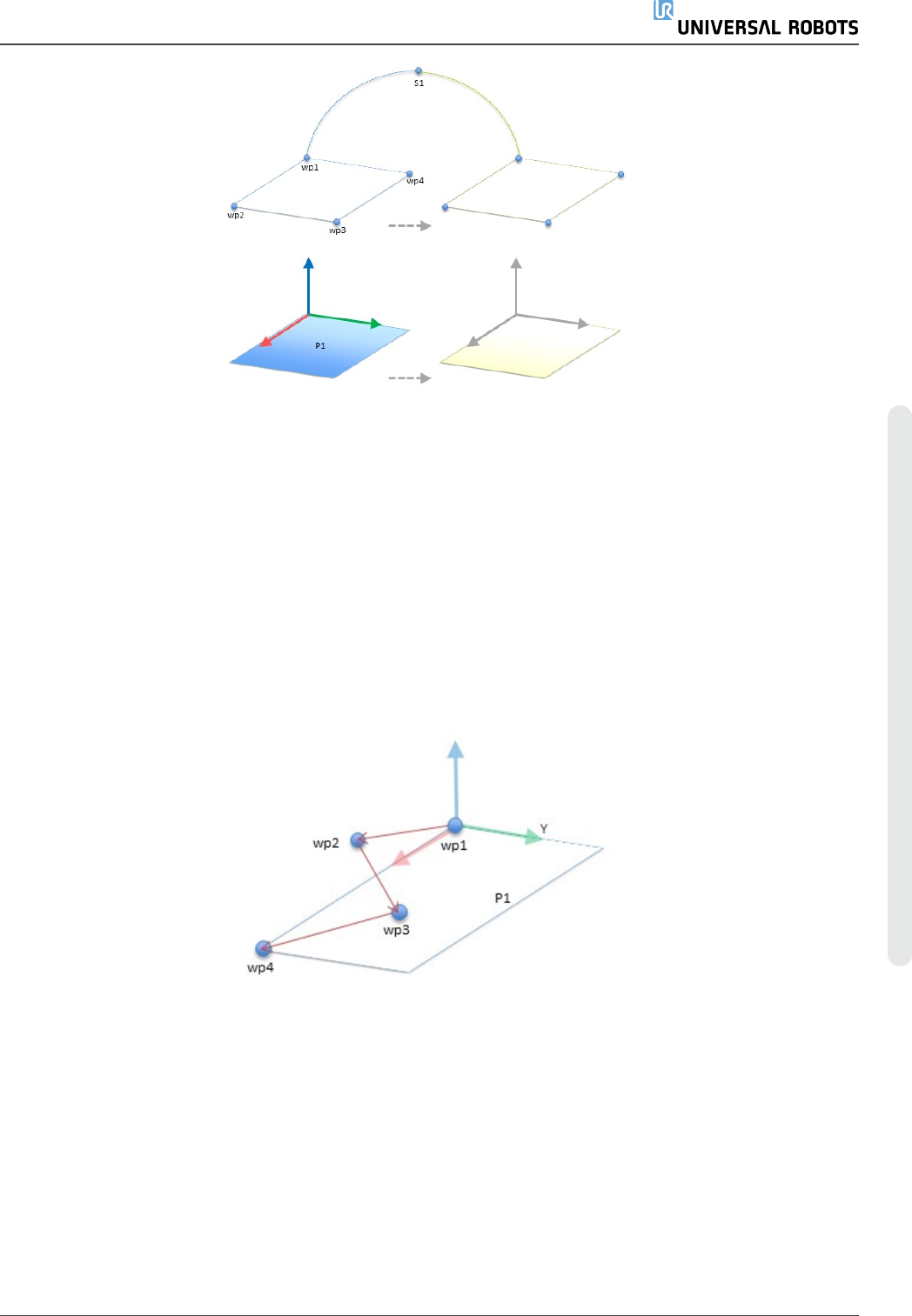
25.17.7. 示例:动态地更新特征位姿
考虑一个类似的应用,其中机器人必须在桌子上以特定的模式移动来完成特定任务( 请参阅
13.5) 。
13.5:
具有相对于某个平面特征的四个路点的 MoveL 命令
Robot Program
MoveJ
wp1
y = 0.01
o = p[0,y,0,0,0,0]
P1_var = pose_trans(P1_var, o)
MoveL # Feature: P1_var
用 户 手 册 207 UR5e
25.安 装设 置选 项卡
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
wp1
wp2
wp3
wp4
13.6:
对该平面特征应用偏移
Robot Program
MoveJ
S1
if (digital_input[0]) then
P1_var = P1
else
P1_var = P2
MoveL # Feature: P1_var
wp1
wp2
wp3
wp4
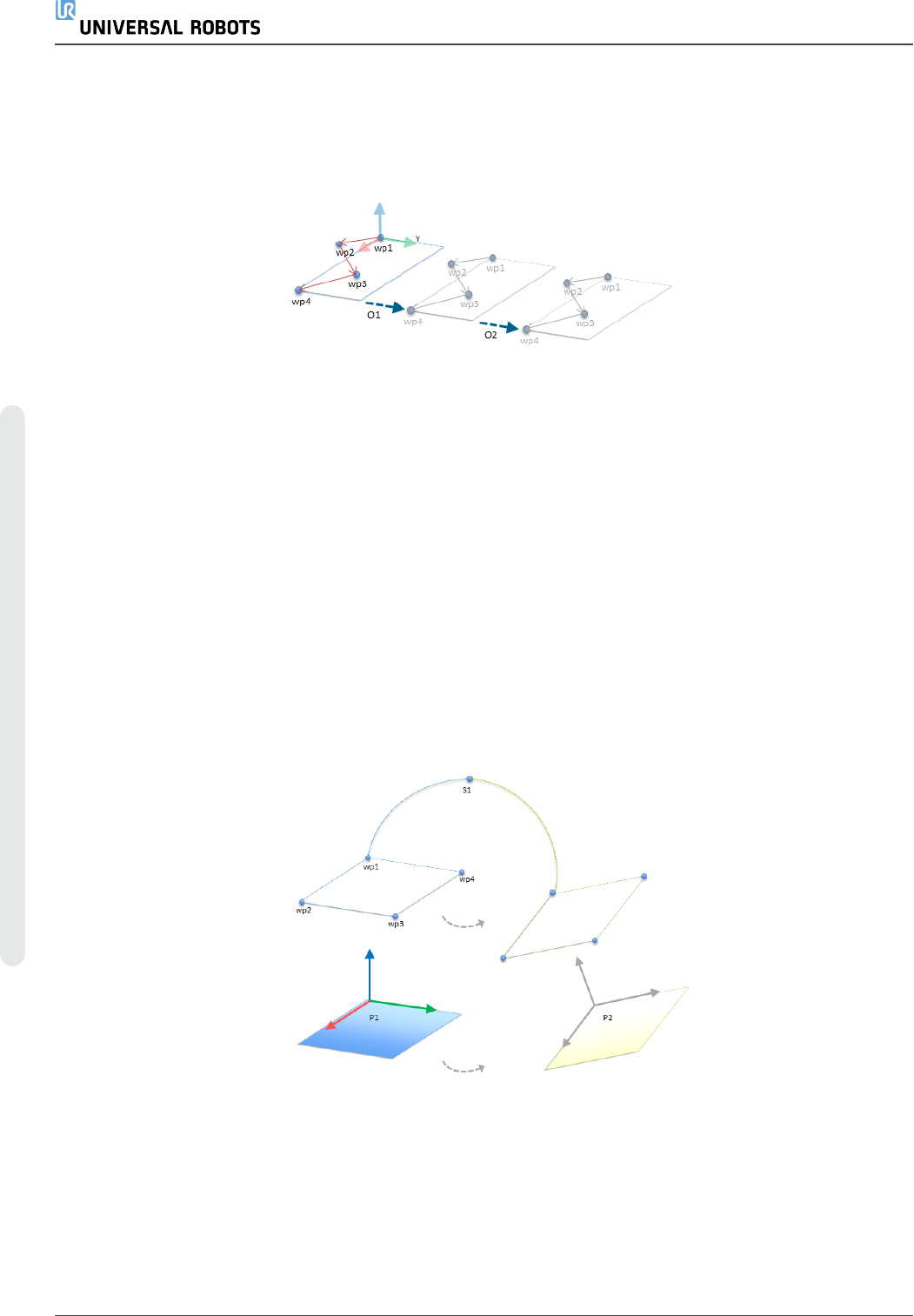
13.7:
从一个平面特征切换到另一个平面特征
相对于
P1
的移动重复了许多次,每次偏移量为
o
。在本例中,偏移在 Y 方向上设置为 10 cm
( 参见图 13.6,偏移量为
O1
和
O2
) 。这通过使用
pose_add()
或
pose_trans()
脚本函数操作变量
来实现。程序在运行时可以切换到不同的特征,而不是添加偏移量。如以下示例所示( 参见图
13.7) ,
MoveL
命令
P1_var
的参考特征可以在两个平面
P1
和
P2
之间切换。
UR5e 208 用 户 手 册
25.安 装设 置选 项卡
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。