99419_UR5e_User_Manual_zh_Global.pdf - 第42页
6. 电 气 接 口 6.1. 前 言 本 章 介 绍 机 器 人 手 臂 和 控 制 箱 的 电 气 接 口 组 。 大 部 分 类 型 的 I/O 都 提 供 有 示 例 。 I/O 一 词 是 指 进 出 下 列 电 气 接 口 组 的 数 字 及 模 拟 控 制 信 号 。 • 电 源 连 接 • 机 器 人 连 接 • 控 制 器 I/O • 工 具 I/O • 以 太 网 6.1 .1. 控 制 箱 支 架 在 I/O 接…
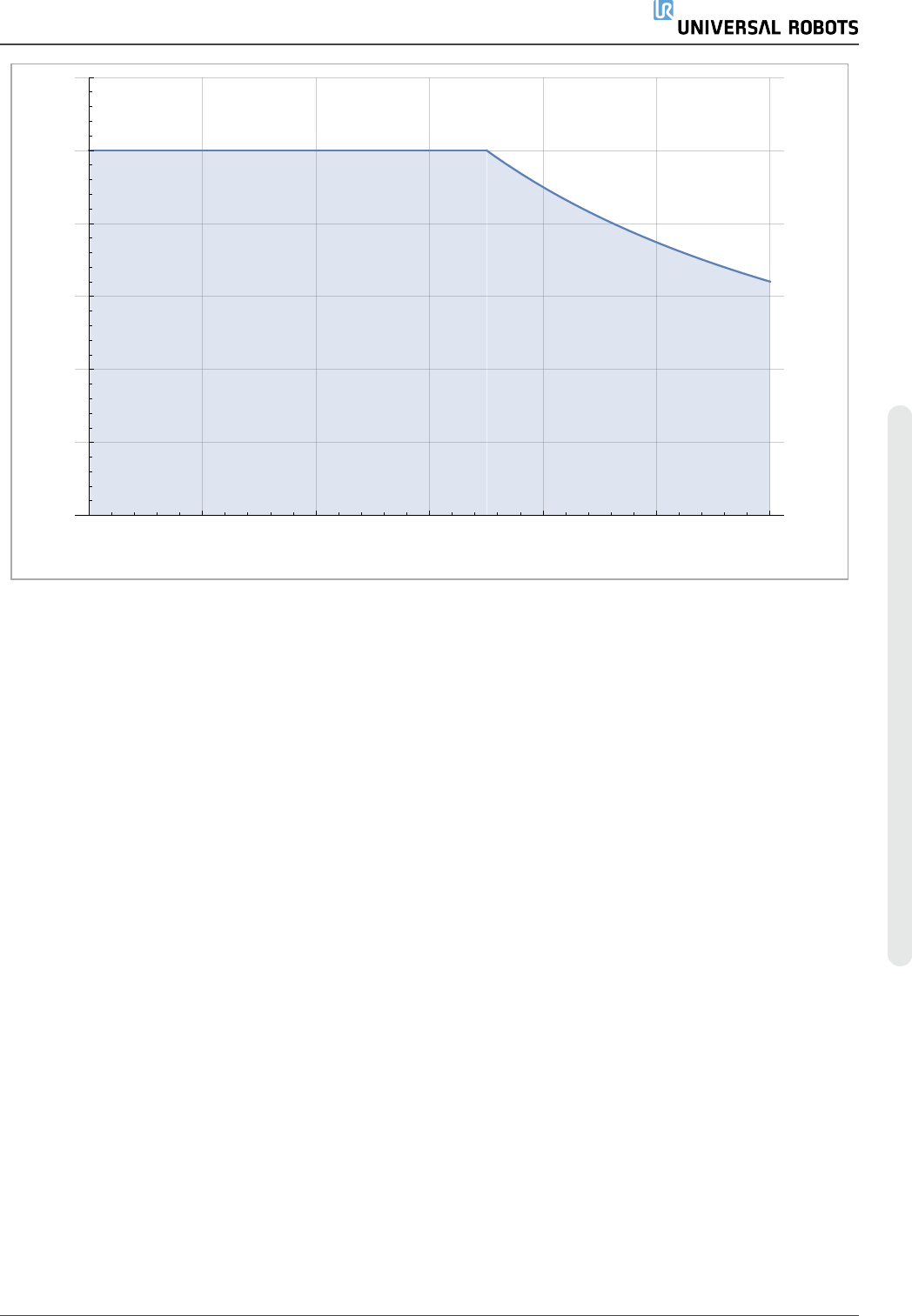
0 100 200 300 400 500 600
1
2
3
4
5
6
重心偏移 [mm]
6.3:
最大允许有效载荷与重心偏移之间的关系。
用 户 手 册 27 UR5e
5.机 械接 口
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
6.电气接口
6.1. 前言
本章介绍机器人手臂和控制箱的电气接口组。大部分类型的 I/O 都提供有示例。I/O 一词是指
进出下列电气接口组的数字及模拟控制信号。
• 电源连接
• 机器人连接
• 控制器 I/O
• 工具 I/O
• 以太网
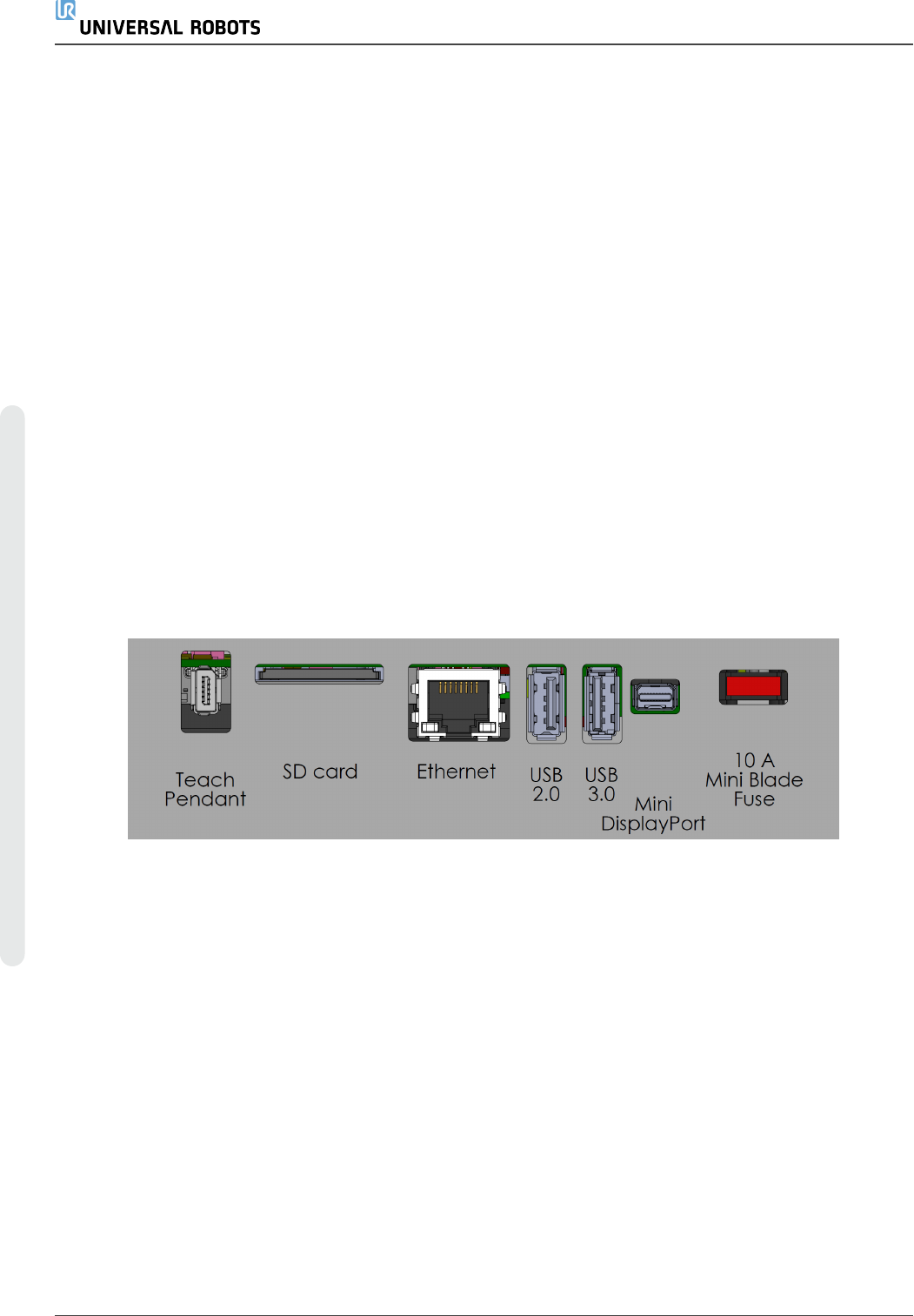
6.1.1. 控制箱支架
在 I/O 接口组的底部,有一个带端口的支架,支持额外的连接( 如下图所示) 。控制箱底部有一
个带盖的开口,便于连接( 请参阅6.2. 以太网 向下) 。
Mini Displayport 支持带 Displayport 的监控器,需要一个有源的 Mini Display 到 DVI 或 HDMI 转换
器来连接监控器和 DVI/HDMI 接口。无源转换器不兼容 DVI/HDMI 端口。
保险丝必须为带有 UL 标志的迷你插片式,最大额定电流为 10A,最小额定电压为 32V
6.2. 以太网
以太网接口可用于:
• MODBUS、以太网/IP 和 PROFINET( 请参阅第 II 部分PolyScope 手册 在本页87) 。
• 远程访问和控制。
以太网电缆的连接:将以太网电缆穿过控制箱底部的孔,然后插入支架底部的以太网端口。
用合适的电缆防水接头更换控制箱底部的盖子,将电缆连接到以太网端口。
UR5e 28 用 户 手 册
6.电 气接 口
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。

电气规范如下表所示。
参数 最小值 类型 最大值 单位
通信速度 10 - 1000 Mb/s
6.3. 电气警告和小心事项
除了设计和安装机器人应用时,还应遵守所有上述接口组的以下警告。
所有电压和电流均为 DC( 直流) ,除非另有规定。
警告
1. 切勿将安全信号连接到安全等级不合适的非安全型 PLC。如果不遵守该
警告,有可能会造成严重的人员伤亡,因为安全功能有可能失效。务必将
安全接口信号与普通 I/O 接口信号分开。
2. 所有安全型信号均具备冗余性( 两个独立通道) 。保持两个通道独立,可
确保在发生单一故障时不会丧失安全功能。
3. 控制箱内部的某些 I/O 可配置为普通 I/O 或安全 I/O。请阅读并理解6.4. 控
制器 I/O下一页一节。
用 户 手 册 29 UR5e
6.电 气接 口
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。