99419_UR5e_User_Manual_zh_Global.pdf - 第43页
电 气 规 范 如 下 表 所 示 。 参 数 最 小 值 类型 最 大 值 单 位 通 信 速 度 10 - 100 0 Mb /s 6.3. 电 气 警 告 和 小 心 事 项 除 了 设 计 和 安 装 机 器 人 应 用 时 , 还 应 遵 守 所 有 上 述 接 口 组 的 以 下 警 告 。 所 有 电 压 和 电 流 均 为 D C ( 直 流 ) , 除 非 另 有 规 定 。 警 告 1. 切 勿 将 安 全 信 号 …
6.电气接口
6.1. 前言
本章介绍机器人手臂和控制箱的电气接口组。大部分类型的 I/O 都提供有示例。I/O 一词是指
进出下列电气接口组的数字及模拟控制信号。
• 电源连接
• 机器人连接
• 控制器 I/O
• 工具 I/O
• 以太网
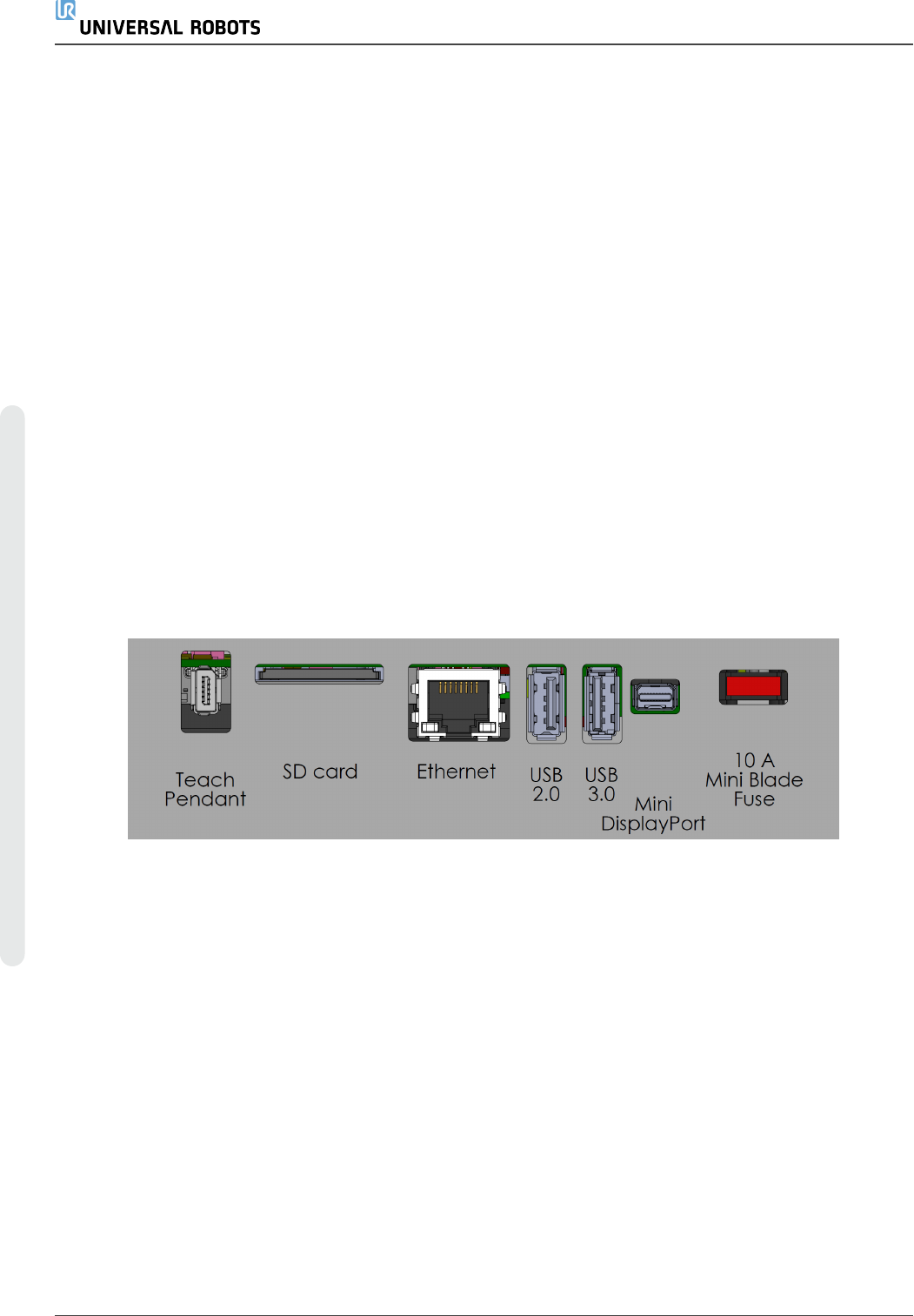
6.1.1. 控制箱支架
在 I/O 接口组的底部,有一个带端口的支架,支持额外的连接( 如下图所示) 。控制箱底部有一
个带盖的开口,便于连接( 请参阅6.2. 以太网 向下) 。
Mini Displayport 支持带 Displayport 的监控器,需要一个有源的 Mini Display 到 DVI 或 HDMI 转换
器来连接监控器和 DVI/HDMI 接口。无源转换器不兼容 DVI/HDMI 端口。
保险丝必须为带有 UL 标志的迷你插片式,最大额定电流为 10A,最小额定电压为 32V
6.2. 以太网
以太网接口可用于:
• MODBUS、以太网/IP 和 PROFINET( 请参阅第 II 部分PolyScope 手册 在本页87) 。
• 远程访问和控制。
以太网电缆的连接:将以太网电缆穿过控制箱底部的孔,然后插入支架底部的以太网端口。
用合适的电缆防水接头更换控制箱底部的盖子,将电缆连接到以太网端口。
UR5e 28 用 户 手 册
6.电 气接 口
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。

电气规范如下表所示。
参数 最小值 类型 最大值 单位
通信速度 10 - 1000 Mb/s
6.3. 电气警告和小心事项
除了设计和安装机器人应用时,还应遵守所有上述接口组的以下警告。
所有电压和电流均为 DC( 直流) ,除非另有规定。
警告
1. 切勿将安全信号连接到安全等级不合适的非安全型 PLC。如果不遵守该
警告,有可能会造成严重的人员伤亡,因为安全功能有可能失效。务必将
安全接口信号与普通 I/O 接口信号分开。
2. 所有安全型信号均具备冗余性( 两个独立通道) 。保持两个通道独立,可
确保在发生单一故障时不会丧失安全功能。
3. 控制箱内部的某些 I/O 可配置为普通 I/O 或安全 I/O。请阅读并理解6.4. 控
制器 I/O下一页一节。
用 户 手 册 29 UR5e
6.电 气接 口
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
警告
1. 请确保所有不得沾水的设备都保持干燥。如果水进入了产品,请对所有
电源上锁挂牌,然后联系您当地的 Universal Robots 服务提供商寻求帮
助。
2. 仅使用该机器人的原装电缆。请不要在那些电缆需要弯折的应用中使用
机器人。
3. 负接头指接地 (GND) 接头,且与机器人和控制箱的防护罩相连。本文提
到的所有 GND 接头只适用于供电和传送信号。对于保护性接地 (PE),请
使用控制箱中标记接地标志的 M6 螺丝接头。接地连接器应至少有该系
统内最高电流的额定电流。
4. 将接口电缆安装到机器人 I/O 时要小心。底部的金属板供接口电缆和连接
器使用。钻孔前请去掉这个金属板。重新安装金属板前,请确保所有的毛
面都已去掉。记得使用正确尺寸的压盖。
小心
1. 机器人已根据电磁兼容性 (EMC) 的国际 IEC 标准进行测试。高于 IEC 标
准中规定电平的干扰信号将会造成机器人的异常行为。信号电平极高或
过度暴露将会对机器人造成永久性的损害。EMC 问题通常发生在焊接过
程中,通常由日志中的错误消息提示。由 EMC 问题造成的任何损失,
Universal Robots 概不负责。
2. 用于连接控制箱与其他机械和工厂设备的 I/O 电缆长度不得超过 30 米,
除非进行附加测试后表明可行。
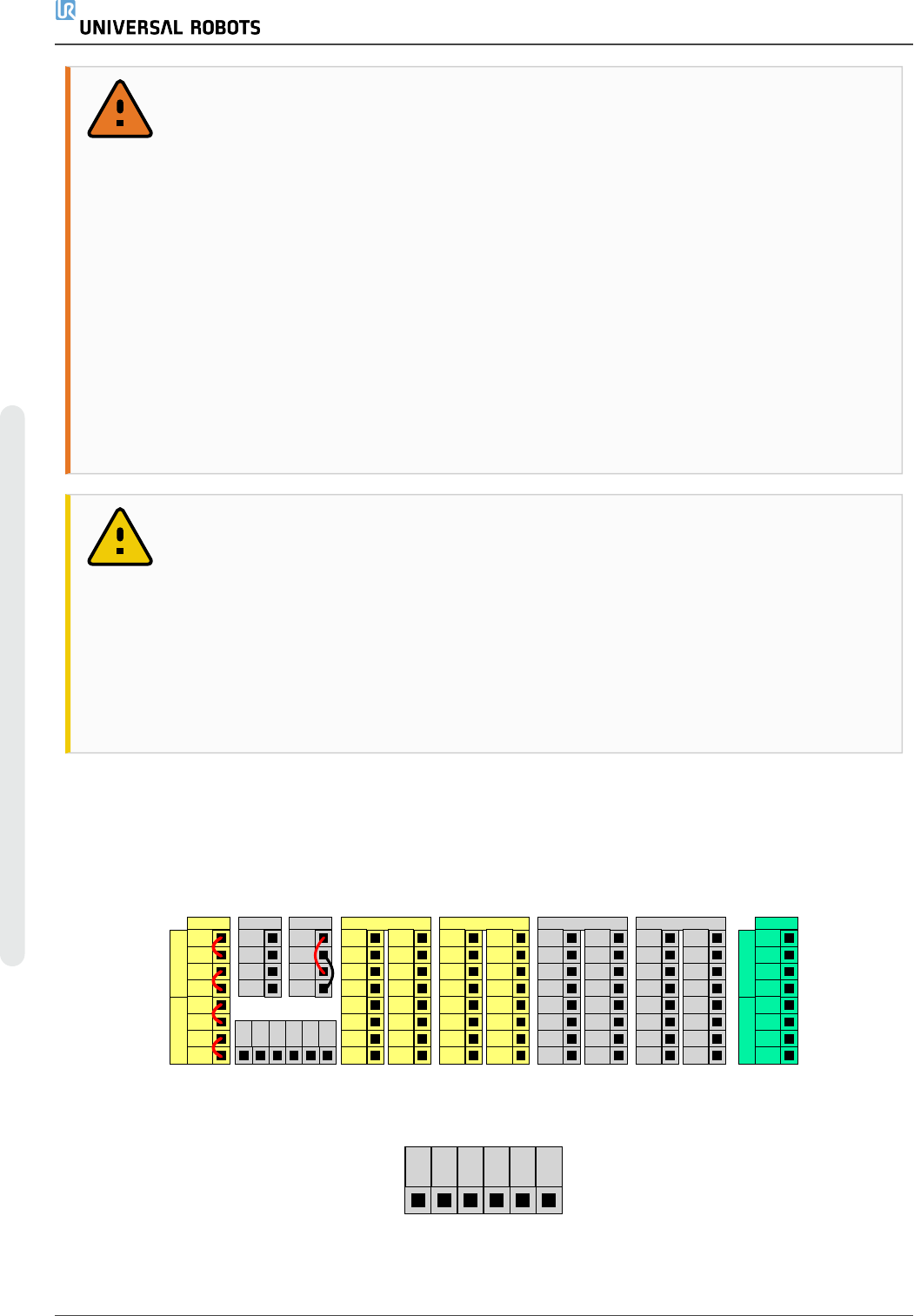
6.4. 控制器 I/O
您可以使用控制箱内的 I/O 来控制各种设备,包括气动继电器、PLC 和紧急停止按钮。
下图显示了控制箱内部的电气接口组。
24V
EI1
24V
SI0
24V
SI1
24V
EI0
Safety
ON
OFF
12V
Remot e
24V
0V
P WR
GND
P ower
24V
CI1
24V
CI2
24V
CI3
24V
CI0
Configu rab le Input s
24V
CI5
24V
CI6
24V
CI7
24V
CI4
0V
CO1
0V
CO2
0V
CO3
0V
CO0
Configu rab le Outpu ts
0V
CO5
0V
CO6
0V
CO7
0V
CO4
24V
DI1
24V
DI2
24V
DI3
24V
DI0
Digit al Input s
24V
DI5
24V
DI6
24V
DI7
24V
DI4
0V
DO1
0V
DO2
0V
DO3
0V
DO0
Digit al Outputs
0V
DO5
0V
DO6
0V
DO7
0V
DO4
AG
AI1
AG
AO0
AG
AO1
AG
AI0
Analog
Analog Outp uts
Analog Inputs
Saf egu ard S top
Emerg ency St op
GND
0V
24V
DI8
DI9
DI10
DI11
对于这些类型的输入,可以使用下图所示的水平数字输入块 (DI8-DI11) 进行正交编码输送机
跟踪( 请参阅6.4.1. 所有数字 I/O 的通用规范 对页 ) 。
0V
24V
DI8
DI9
DI10
DI11
必须遵守并维护下面列出的配色方案的含义。
UR5e 30 用 户 手 册
6.电 气接 口
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。