99419_UR5e_User_Manual_zh_Global.pdf - 第65页
注 意 使 用 压 缩 空 气 清 洁 控 制 箱 内 部 可 能 会 损 坏 组 件 。 • 请 勿 使 用 压 缩 空 气 清 洁 控 制 箱 内 部 。 7.3 .5. 自 由 驱 动 检 查 1. 拆 卸 附 件 或 根 据 工 具 规 格 设 置 TC P/ 有 效 载 荷 / 重 心 。 2. 要 在 “ 自 由 驱 动 ” 模 式 下 移 动 机 器 人 手 臂 : • 在 标 准 的 示 教 盒 上 , 按 住 “ 自 …
7.3.2. 机器人手臂目检
注意
使用压缩空气清洁机械臂可能会损坏机械臂组件。
• 切勿使用压缩空气清洁机器人手臂。
注意
如果在保修期内发现机器人有任何损坏,请联系销售机器人的经销商。
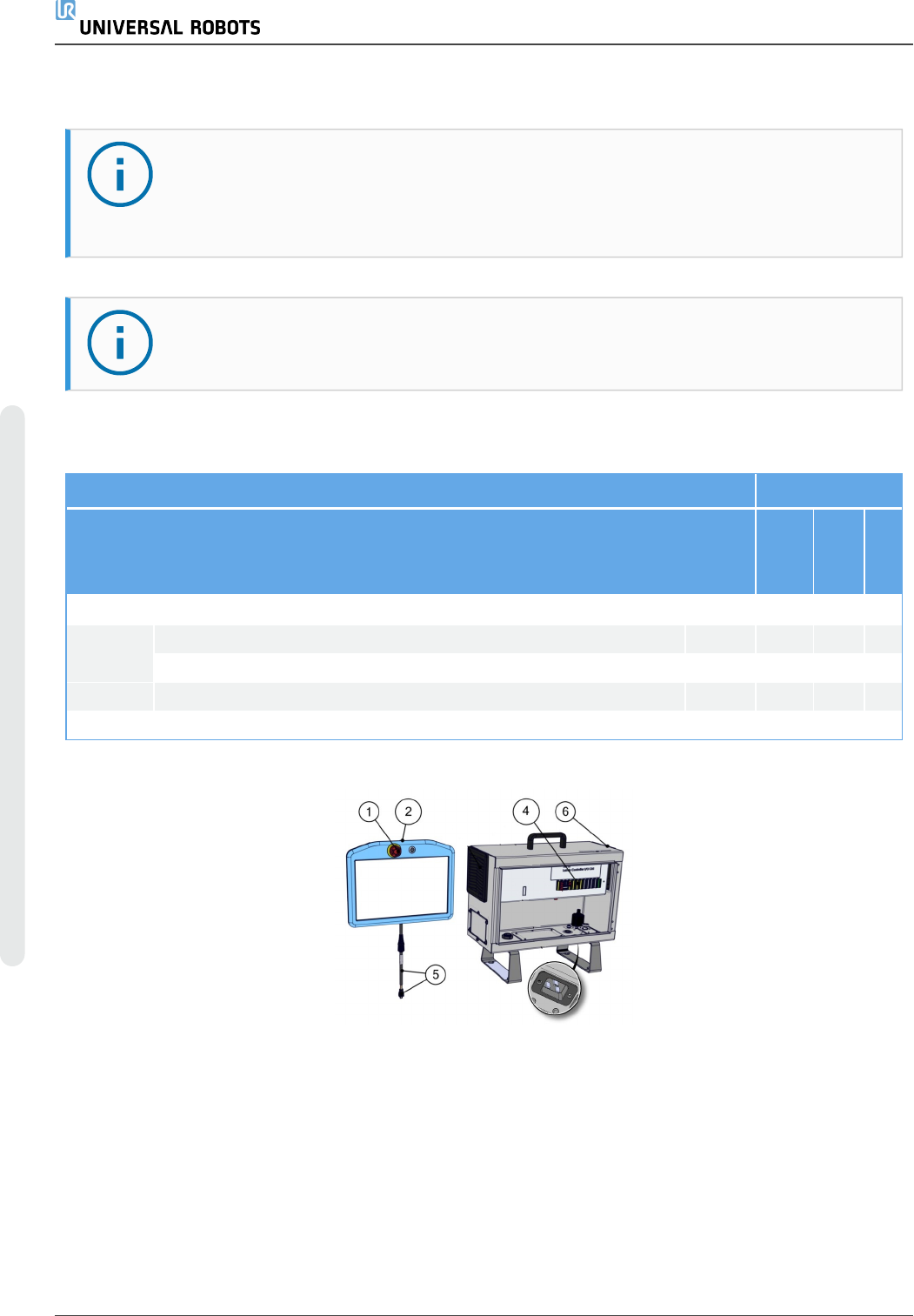
7.3.3. 控制箱检查计划
时间表
每
月
每
半
年
每
年
1 F ✘
2 & 3
F ✘
F ✘
4 & 5 检查示教盒电缆和连接器 V ✘
6 V ✘
V = 目检 F = 功能检查
7.3.4. 控制箱目检
1. 断开电源线与控制箱的连接。
2. 检查控制箱外部是否有污垢/灰尘。
• 如果需要,请使用 ESD 真空吸尘器进行清洁。
UR5e 50 用 户 手 册
7.维 护和 维修
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
注意
使用压缩空气清洁控制箱内部可能会损坏组件。
• 请勿使用压缩空气清洁控制箱内部。
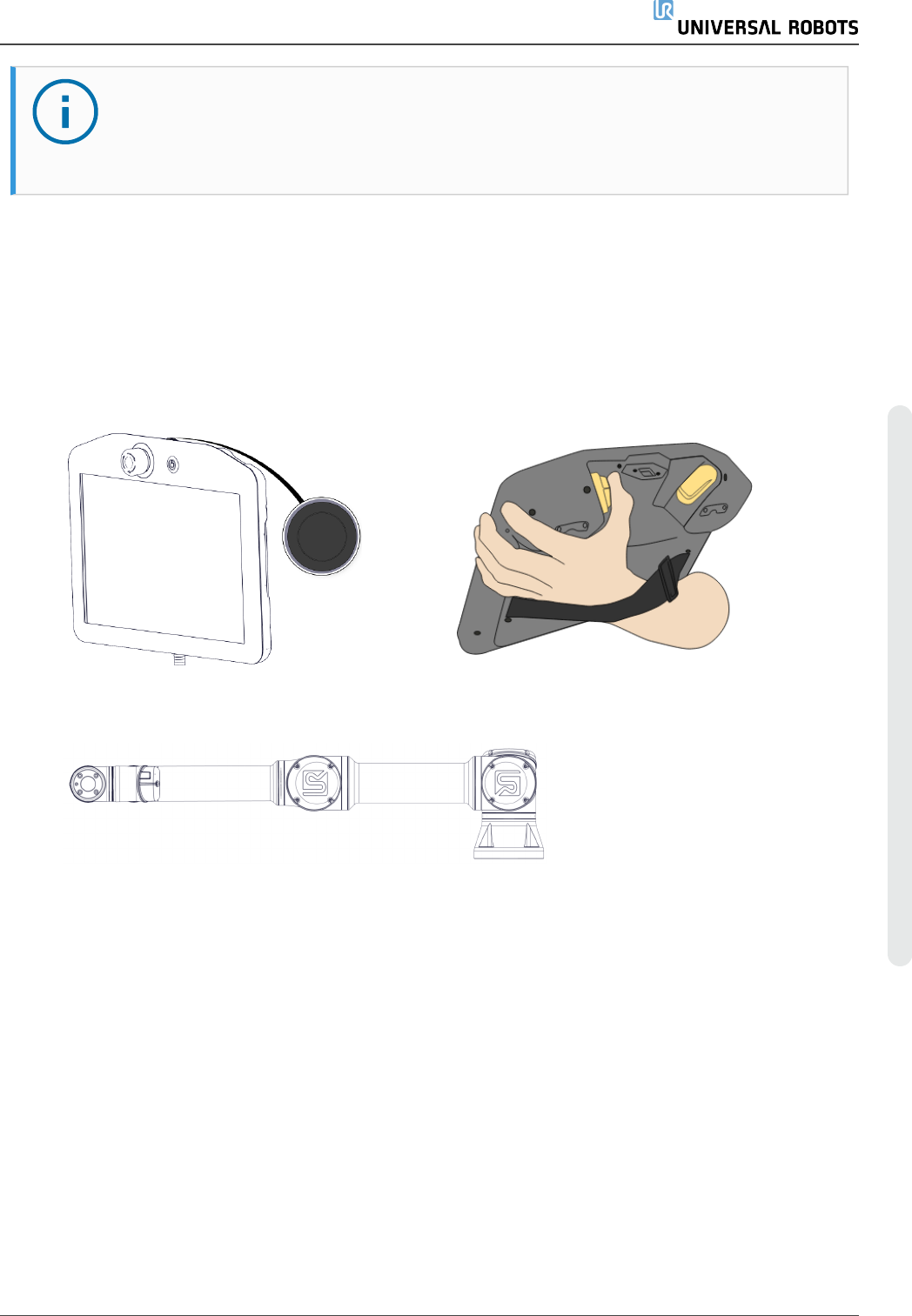
7.3.5. 自由驱动检查
1. 拆卸附件或根据工具规格设置 TCP/有效载荷/重心。
2. 要在“自由驱动”模式下移动机器人手臂:
• 在标准的示教盒上,按住“自由驱动”按钮。
• 在 3PE 示教盒上,快速轻按,然后轻按并按住 3PE 按钮。
标准示教盒 3PE TP
3. 将机器人手臂拉/推到水平伸长的位置,然后松开。
4. 验证机器人在以下情况下可保持其位置:按住“自由驱动”按钮的同时未按住机器人的按
钮。
用 户 手 册 51 UR5e
7.维 护和 维修
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
8.处理和环境
Universal Robots e-Series 机器人必须按照适用的国家法律、法规和标准进行处置。
Universal Robots e-Series 机器人生产时限制使用有害物质以保护环境;符合欧洲 RoHS 指令
2011/65/EU 的定义。这些危险物质包括汞、镉、铅、六价铬、多溴联苯 、多溴联苯醚。
丹麦市场上出售的 Universal Robots e-Series 机器人的电子废弃物的处置处理费用已由
Universal Robots A/S 预付给 DPA-system。在适用欧盟 WEEE 指令 2012/19/EU 的国家/地区,进
口商必须向其本国 WEEE 注册机构登记。费用通常低于 1€/机器人。有关各个国家/地区注册
机构的列表,请访问以下链接:https://www.ewrn.org/national-registers。
下述符号将贴在机器人上以表示符合上述法律法规。
UR5e 52 用 户 手 册
8.处 理和 环境
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。