99419_UR5e_User_Manual_zh_Global.pdf - 第92页
SF# an d Safety Func ti o n D e s c ri pti on What hap pen s ? Tol e- ranc e PFH d Affec ts J oi nt Torque Li mi t Exc eed in g the int ernal jo in t torque l im it ( e ac h joi nt) resu lts in a Cat 0 s top3 . Thi s is …
SF# and
Safety
Function
Description What happens?
Tole-
rance
PFHd Affects
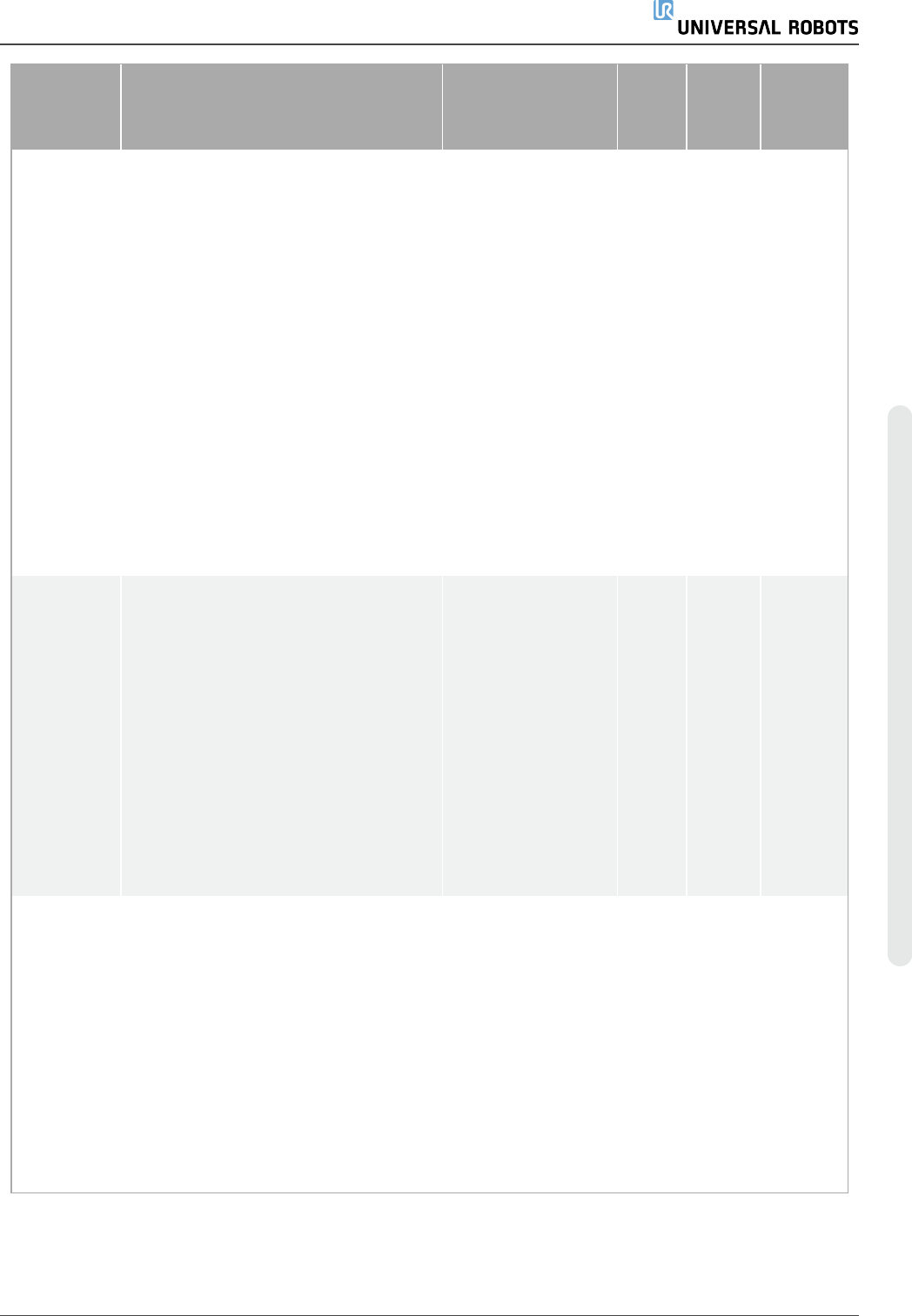
SF2
Safeguard
Stop4
(Protective
Stop
according
to ISO
10218-1)
This safety function is initiated by an
external protective device using
safety inputs which will initiate a Cat 2
stop3. The tool I/O are unaffected by
the safeguard stop. Various
configurations are provided. If an
enabling device is connected, it is
possible to configure the safeguard
stop to function in automatic mode
ONLY. See the Stop Time and Stop
Distance Safety Functions4 . For the
functional safety of the complete
integrated safety function, add the
PFHd of the external protective
device to the PFHd of the Safeguard
Stop.
Category 2 stop
(IEC 60204-1) SS2
stop (as described
in IEC 61800-5-2)
-
1.20E-
07
Robot
SF3
Joint
Position
Limit (soft
axis
limiting)
Sets upper and lower limits for the
allowed joint positions. Stopping time
and distance is not a considered as
the limit(s) will not be violated. Each
joint can have its own limits. Directly
limits the set of allowed joint positions
that the joints can move within. It is
set in the safety part of the User
Interface. It is a means of safety-rated
soft axis limiting and space limiting,
according to ISO 10218-1:2011,
5.12.3.
Will not allow
motion to exceed
any limit settings.
Speed could be
reduced so motion
will not exceed any
limit. A protective
stop will be initiated
to prevent
exceeding any limit.
5°
1.20E-
07
Joint
(each)
SF4
Joint
Speed
Limit
Sets an upper limit for the joint speed.
Each joint can have its own limit. This
safety function has the most influence
on energy transfer upon contact
(clamping or transient). Directly limits
the set of allowed joint speeds which
the joints are allowed to perform. It is
set in the safety setup part of the User
Interface. Used to limit fast joint
movements, e.g. risks related to
singularities.
Will not allow
motion to exceed
any limit settings.
Speed could be
reduced so motion
will not exceed any
limit. A protective
stop will be initiated
to prevent
exceeding any limit.
1.15
°/s
1.20E-
07
Joint
(each)
用 户 手 册 77 UR5e
17.安 全功 能表
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
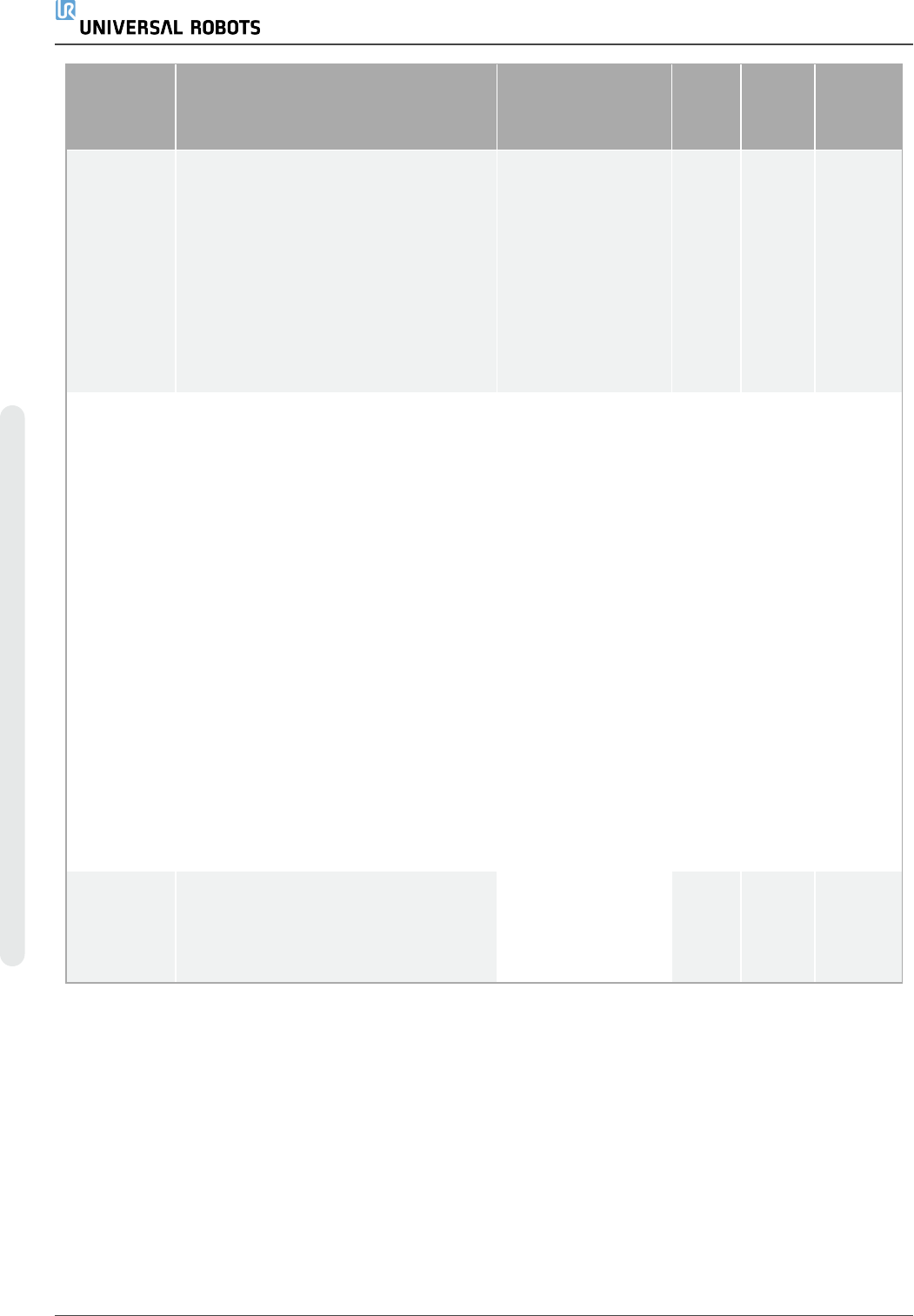
SF# and
Safety
Function
Description What happens?
Tole-
rance
PFHd Affects
Joint
Torque
Limit
Exceeding the internal joint torque
limit (each joint) results in a Cat 0
stop3. This is shown as SF #5 in the
Generation 3 (CB3) UR robots. This
is not accessible to the user; it is a
factory setting. It is NOT shown as a
safety function because there are no
user settings and no user
configuration possibilities.
- - - -
SF5
Called
various
names:
Pose Limit,
Tool Limit,
Orientation
Limit,
Safety
Planes,
Safety
Boundaries
Monitors the TCP Pose (position and
orientation) and will prevent
exceeding a safety plane or TCP
Pose Limit. Multiple pose limits are
possible (tool flange, elbow, and up to
2 configurable tool offset points with a
radius) Orientation restricted by the
deviation from the feature Z direction
of the tool flange OR the TCP. This
safety function consists of two parts.
One is the safety planes for limiting
the possible TCP positions. The
second is the TCP orientation limit,
which is entered as an allowed
direction and a tolerance. This
provides TCP and wrist inclusion/
exclusion zones due to the safety
planes.
Will not allow
motion to exceed
any limit settings.
Speed or torques
could be reduced
so motion will not
exceed any limit. A
protective stop will
be initiated to
prevent exceeding
any limit. Will not
allow motion to
exceed any limit
settings.
3 °
40
mm
1.20E-
07
TCP
Tool
flange
Elbow
SF6
Speed
Limit TCP
& Elbow
Monitors the TCP and elbow speed
to prevent exceeding a speed limit.
50
mm/s
1.20E-
07
TCP
UR5e 78 用 户 手 册
17.安 全功 能表
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
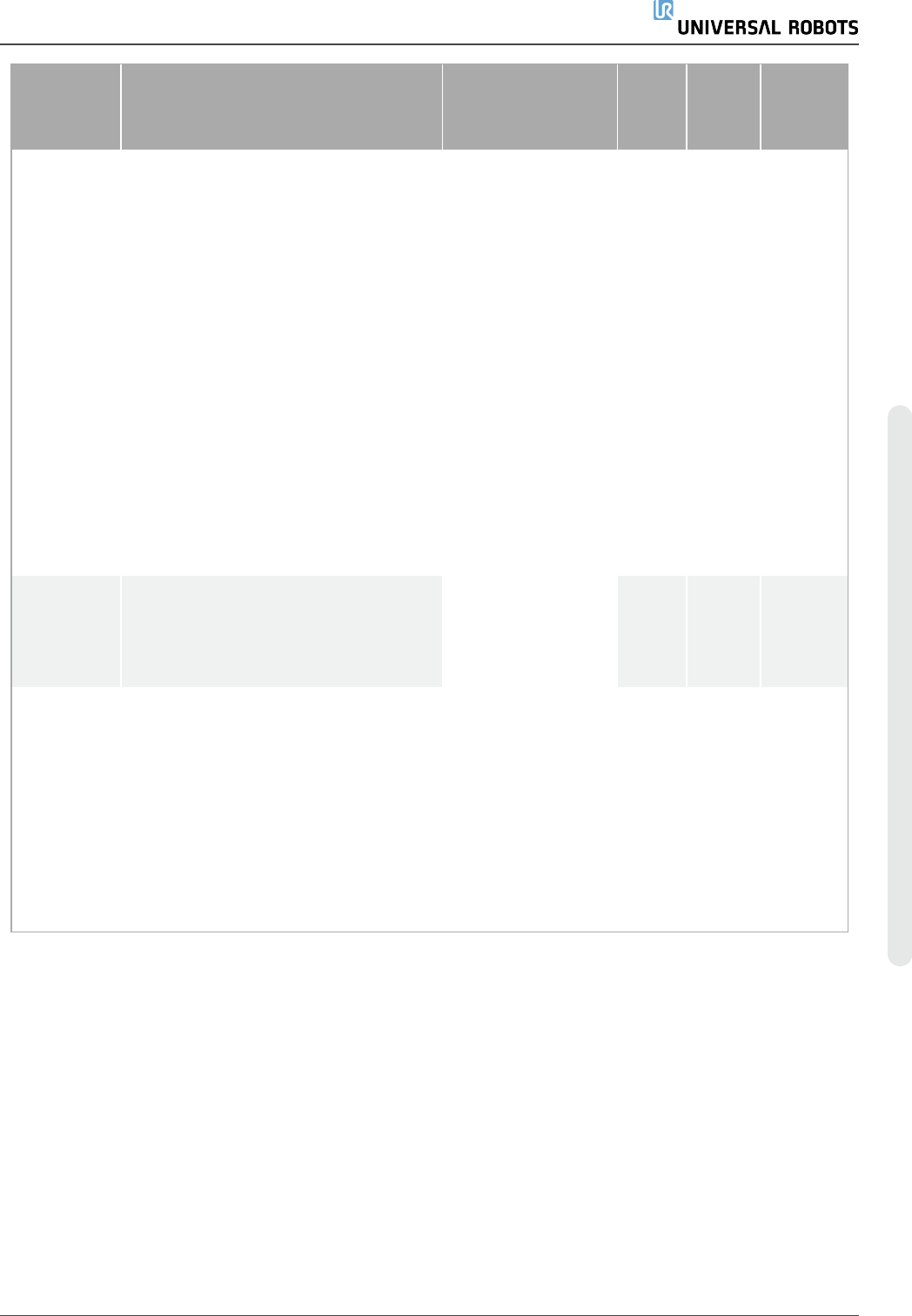
SF# and
Safety
Function
Description What happens?
Tole-
rance
PFHd Affects
SF7
Force Limit
(TCP)
The Force Limit is the force exerted
by the robot at the TCP (tool center
point) and “elbow”. The safety
function continuously calculates the
torques allowed for each joint to stay
within the defined force limit for both
the TCP & the elbow. The joints
control their torque output to stay
within the allowed torque range. This
means that the forces at the TCP or
elbow will stay within the defined
force limit. When a monitored stop is
initiated by the Force Limit SF, the
robot will stop, then “back-off” to a
position where the force limit was not
exceeded. Then it will stop again.
Will not allow
motion to exceed
any limit settings.
Speed or torques
could be reduced
so motion will not
exceed any limit. A
protective stop will
be initiated to
prevent exceeding
any limit. Will not
allow motion to
exceed any limit
settings.
25N
1.50E-
07
TCP
SF8
Momentum
Limit
The momentum limit is very useful for
limiting transient impacts. The
Momentum Limit affects the entire
robot.
3 kg
m/s
1.20E-
07
Robot
SF9
Power
Limit
This function monitors the
mechanical work (sum of joint
torques times joint angular speeds)
performed by the robot, which also
affects the current to the robot arm as
well as the robot speed. This safety
function dynamically limits the
current/ torque but maintains the
speed.
Dynamic limiting of
the current/torque
10 W
1.50E-
07
Robot
用 户 手 册 79 UR5e
17.安 全功 能表
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。