MX系列中文说明书 - 第176页
Mx Series Manual 4-10 错误 代 码 信息 内 容 措施 措施方法及 参 考 7020 Homing 时, Work1 的接驳台上 有 PCB 。 请挪开 Boar d 后进行 Homing 。 4 - 4 6 7021 Homing 时, Loadin g 接驳台上 有 PCB 。 请挪开 Boar d 后进行 Homing 。 4 - 4 6 7022 Homing 时, Exit 接驳台上有 PCB 。 请挪开…
第4章 解决问题
4-9
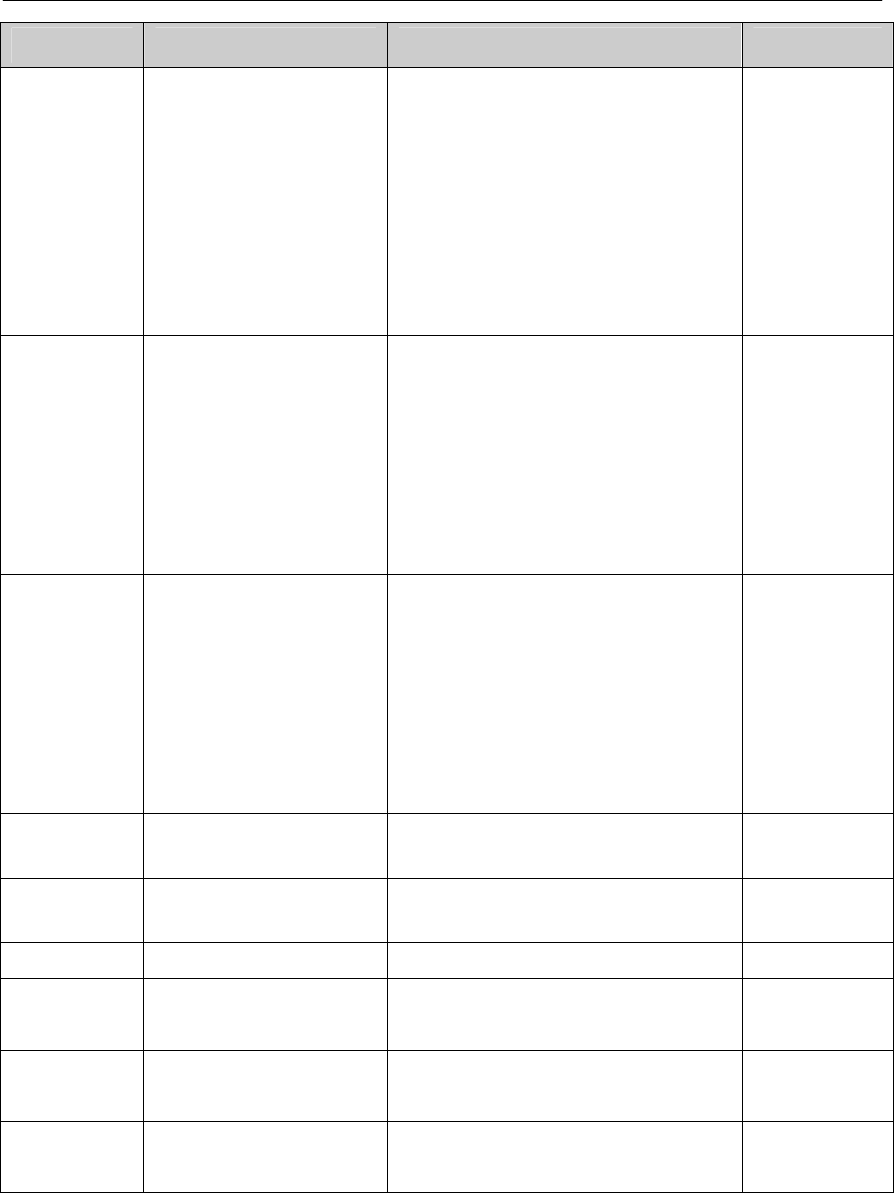
错误代码 信息内容 措施 措施方法及参考
7005 作业位置上的Board无法移动
至出口位置。
请确认中间的Step motor是否正常运行,或作
业位置的传感器是否正常运行。
如果是Step motor出现问题,首先确认是中间
的2个Step motor同时不转,还是其中一个不
转,如果两个都不转,请确认TB CN11的pin5
和pin7之间是否正常显示24V。
如果只有一个不转,请确认与Step motor相连
的Molex 5557 connector及TB的 CN4、5连
接状态。
4-46
7006 Board位于作业位置与出口位
置中间。
请确认出口的Step motor是否正常运行,或出
口位置的传感器是否正常运行。
如果是Step motor出现问题,首先确认是出口
的2个Step motor同时不转,还是其中一个不
转,如果两个都不转,请确认TB CN11的pin5
和pin7之间是否正常显示24V。如果只有一个
不转,请确认与Step motor相连的Molex 555
7 connector及TB的 CN6、7连接状态。
4-46
7007 Board无法从出口位置移动至
下一个装备。
请确认出口的Step motor是否正常运行,或出
口位置的传感器是否正常运行。
如果是Step motor出现问题,首先确认是出口
的2个Step motor同时不转,还是其中一个不
转,如果两个都不转,请确认TB CN11的pin5
和pin7之间是否正常显示24V。如果只有一个
不转,请确认与Step motor相连的Molex 555
7 connector及TB的 CN6、7连接状态。
4-46
7008
请移开置于不合格品排出
Conveyor
上的部件。
请确认CONVEYOR状态。 4-46
7009
不合格品排出
Conveyor的排出
位置感应器作业异常。
请确认SENSOR。 4-46
7010 位置感应器作业异常。 请确认SENSOR。 4-46
7011
出口Stooper不作业。 请确认Solenoide Valve及Air排线。请确认
SENSOR。
4-46
7012
入口Stooper不作业。 请确认Solenoide Valve及Air排线。请确认
SENSOR。
4-46
7019
Homing时,Work1的接驳台上
有PCB。
请挪开Board后进行Homing。 4-46
Mx Series
Manual
4-10
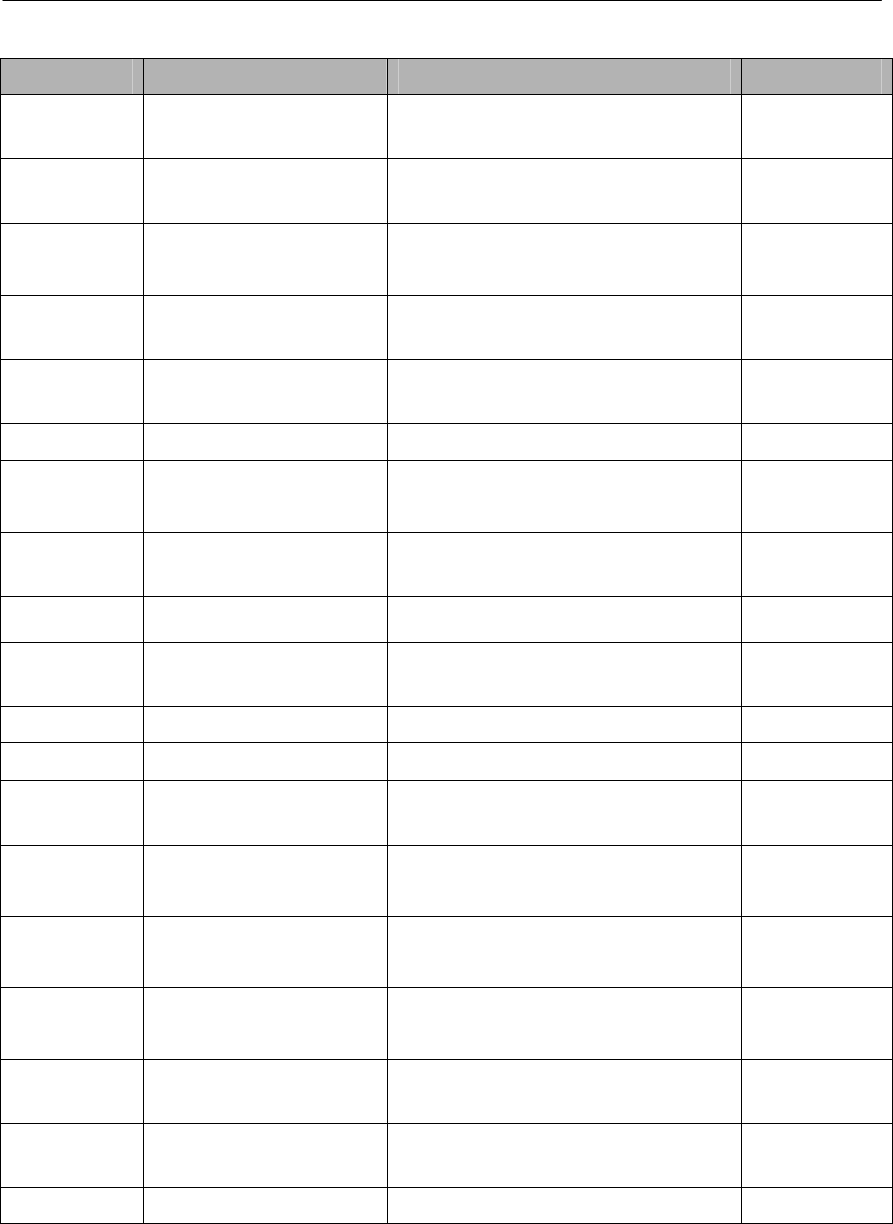
错误代码 信息内容 措施 措施方法及参考
7020
Homing时,Work1的接驳台上
有PCB。
请挪开Board后进行Homing。 4-46
7021
Homing时,
Loading
接驳台上
有PCB。
请挪开Board后进行Homing。 4-46
7022
Homing时,
Exit
接驳台上有
PCB。
请挪开Board后进行Homing。 4-46
7023
Homing时,Work1的接驳台上
有PCB。
请挪开Board或调整Sensor位置并操作。 4-46
7024
Homing时,Work2的接驳台上
有PCB。
请挪开Board或调整Sensor位置并操作。 4-46
7025 Work2与Exit
接驳台
上有PCB。 请挪开Board或调整Sensor位置并操作。 4-46
7026-7029
Conveyor上的PCB幅度与Jod
File上的PCB幅度差大。
请确认Conveyor幅度及PCB尺寸。请确认
Jod File。
4-46
7030 Z轴下垂,无法移动Conveyo
r。
启动Conveyor之前,请确认Z轴位置。 4-46
7031 Conveyor运行时ORG出错。
Z轴Homing后请进行PCB Manual Control。
4-46
7032-7039 Conveyor PCB排出错误。 请确认Conveyor上的接驳台及Sensor,以及
卡住状态。
4-46
7040 Work1有2张PCB。 请挪开Board或调整Board位置并操作。 4-46
7041 Work2有2张PCB。 请挪开Board或调整Board位置并操作。 4-46
7042
Work1中未找到PCB。
请确认Conveyor上的接驳台及感应器,卡住状
态或Step Motor的驱动状态。
4-46
7043
Work2未找到PCB。
请确认Conveyor上的接驳台及感应器,卡住状
态或Step Motor的驱动状态。
4-46
7044
Work1的Conveyor幅度在运行
中改变。
请检验伺服电动机的电源状态及AMP状态。请
确认参数。
4-46
7045
Work2的Conveyor幅度在运行
中改变。
请检验伺服电动机的Motor电源状态机AMP状
态。请确认参数。
4-46
7046-7051 Dual Conveyor中,在Front进
行大型PCB作业时。
请检验伺服电动机的电源状态及AMP状态。请
确认参数及感应器。
4-46
8000
当前正在执行其他功能,无法执
行所要求的命令。
请稍等。
8001 无法读取指定文件。 请重新确认。
第4章 问题解决
4-11
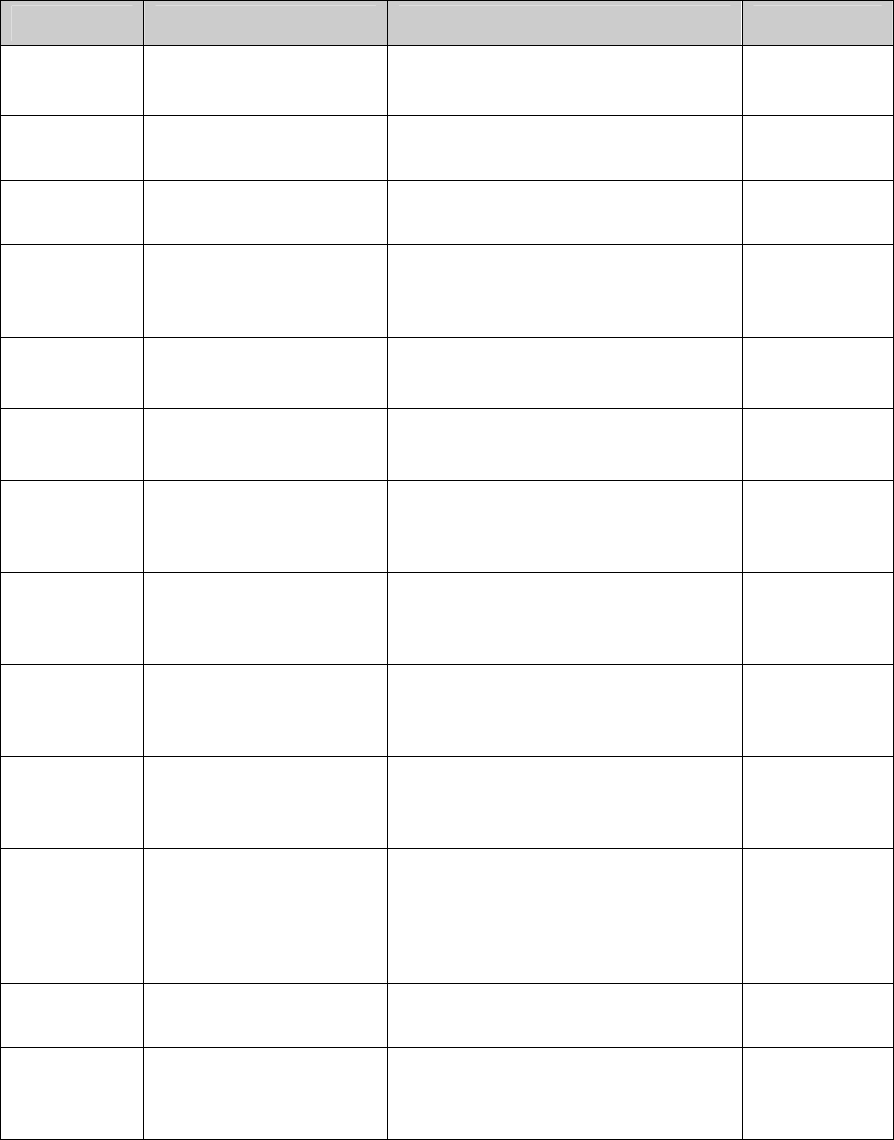
错误代码 信息内容 措施 措施方法及参考
8002 - 8039 即将超出-方向S/W Limit。
(Front X轴)
坐标值超出(-)S/W Limit范围,请增加坐标
值。
8042 - 8079 即将超出+方向S/W Limit。
(Front X轴)
坐标值超出(+)S/W Limit范围,请减少坐标
值。
8082 - 8119 未执行机械回原点。(Front X
轴)
请按下Waiting Position Key回到原点后重
试。
8123 Tray Feeder Z轴回原点被取
消。(TF Y轴回原点未结束)
由于TF Z axis homing未结束,无法执行TF Y
axis homing。请稍后按下"waiting position"
key(DOOR)重新执行回原点。
8124 Shuttle Z轴回原点被取消。
(Shuttle Y轴回原点未结束)
不适用于Mx Series。
8125 Shuttle Z轴回原点被取消。
(Pallet Out)
不适用于Mx Series。
8126 Front gantry回原点被取消。
(Module Z轴高度)
由于Module Z axis过度下垂,无法进行
Front gantry homing。因此将电源Off/On后
等待10秒,然后再回原点。
8127 Front gantry回原点被取消。
(精密Z轴高度)
由于Precision Z axis过度下垂,无法进行
Front gantry homing。因此将电源Off/On后
等待10秒,然后再回原点。
8128 Rear gantry回原点被取消。
(Module Z轴高度)
由于Module Z axis过度下垂,无法进行
Front gantry homing。因此将电源Off/On后
等待10秒,然后再回原点。
8129 Rear gantry回原点被取消。
(精密Z轴高度)
由于Precision Z axis过度下垂,无法进行
Front gantry homing。因此将电源Off/On后
等待10秒,然后再回原点。
8130 机械回原点失败。
(分系列执行回原点步骤)
Servo Off后确认相应轴的作业状态并重试。
请确认Home Sensor状态。
重试后,如果状况持续存在,请求助
C/S Engineer。
4-34
4-37
8131
机械回原点失败。(伺服电动机电
源关闭状态或AMP缺陷)
请确认AMP的电源输入状态。 4-34
4-37
8132 机械回原点失败。
(Z轴中的一个以上被H/W Limit
检测到)
请确认Head Z轴的Limit Sensor。 4-37