3OM-1842-002_G5S_Vol3.pdf - 第227页
3OM-1842 2-59 1303-001 2.8 Schermata "PCB Recog" [1] [2] F3B59 2.8 Schermata "PCB Recog" Grafica dello svolgimento
3OM-1842
2-581303-001
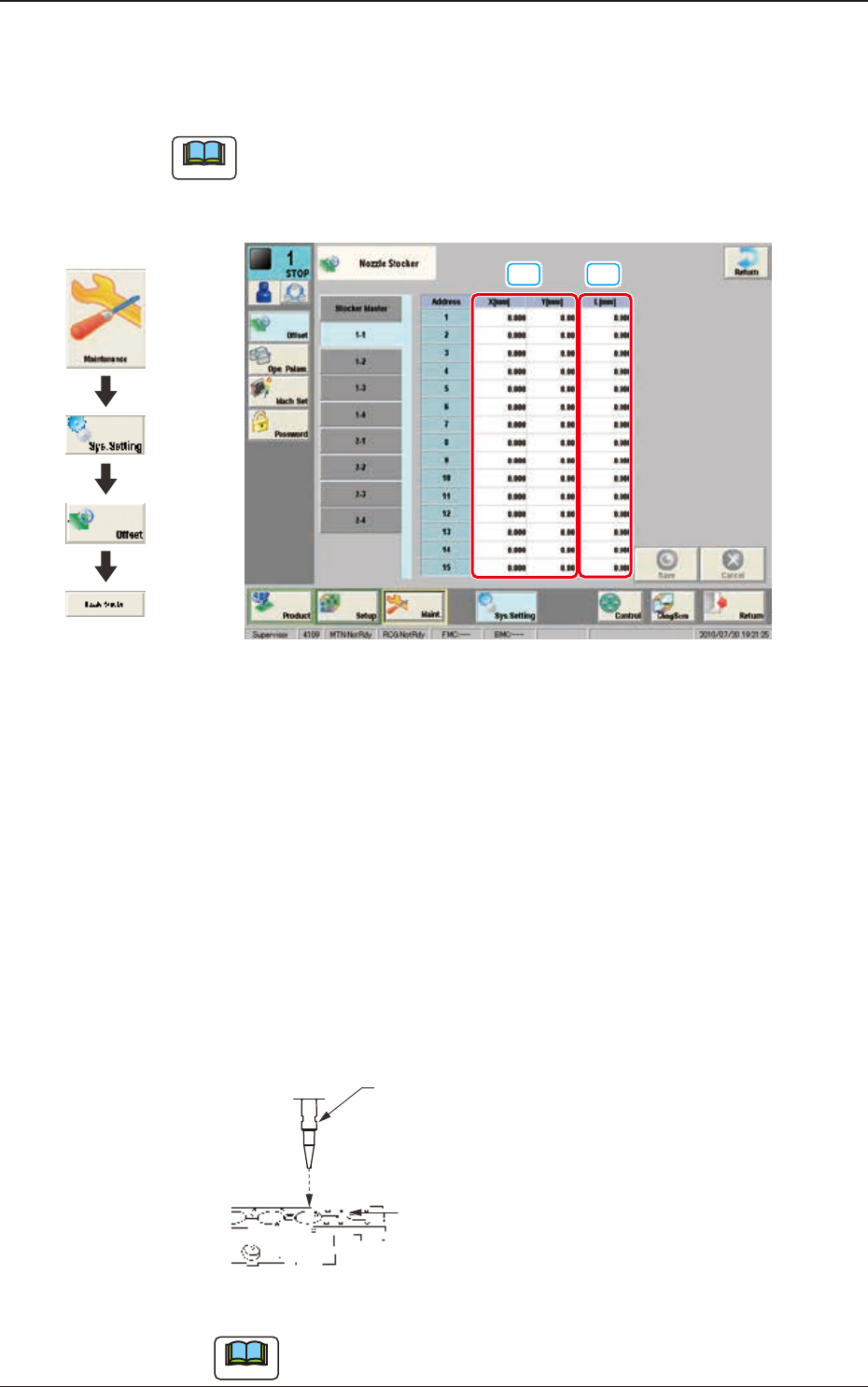
2.7.1 Da 1-1 a 1-4, da 2-1 a 2-4
Quando nella scheda "Offset Data" è premuta la scheda [Nozzle Stocker], ed è
premuta la scheda [1-1], è visualizzata la scheda che segue.
Note
(a) La stessa scheda è visualizzata da [1-2] a [2-4].
(b) La scheda visualizzata potrebbe avere un aspetto diverso, in base
all’opzione selezionata.
[1]
[2]
F3B57
[1] X (Orizzontale) e Y (Verticale) [mm]
Questi dati di compensazione sono utilizzati per regolare la deviazione dal
valore designato per la posizione dell’alloggio ugelli in base alle coordinate
di base XY di individuazione PCB (coordinate XY di riferimento macchina:
origine P0).
Le coordinate XL di riferimento macchina sono impostate sui valori di
riferimento.
Quando è impostato il valore positivo (+) per il valore di compensazione, la
posizione di cambio ugello è cambiata in direzione X (+) e Y (+).
[2] L (Altezza) [mm]
Quando è inserito un valore con un segno più (+), la posizione di cambio
ugello (altezza) è modicata in direzione L (+) e, di conseguenza, la corsa
discendente è aumentata.
Ugello
Livello montaggio ugello
(superficie superiore del blocco alloggio ugelli)
L(+)
F3B58
Note
Il precedente parametro "L" è effettivo solo nell'ugello master.
2.7 Schermata "Nozzle Stocker"
Grafica dello
svolgimento
3OM-1842
2-591303-001
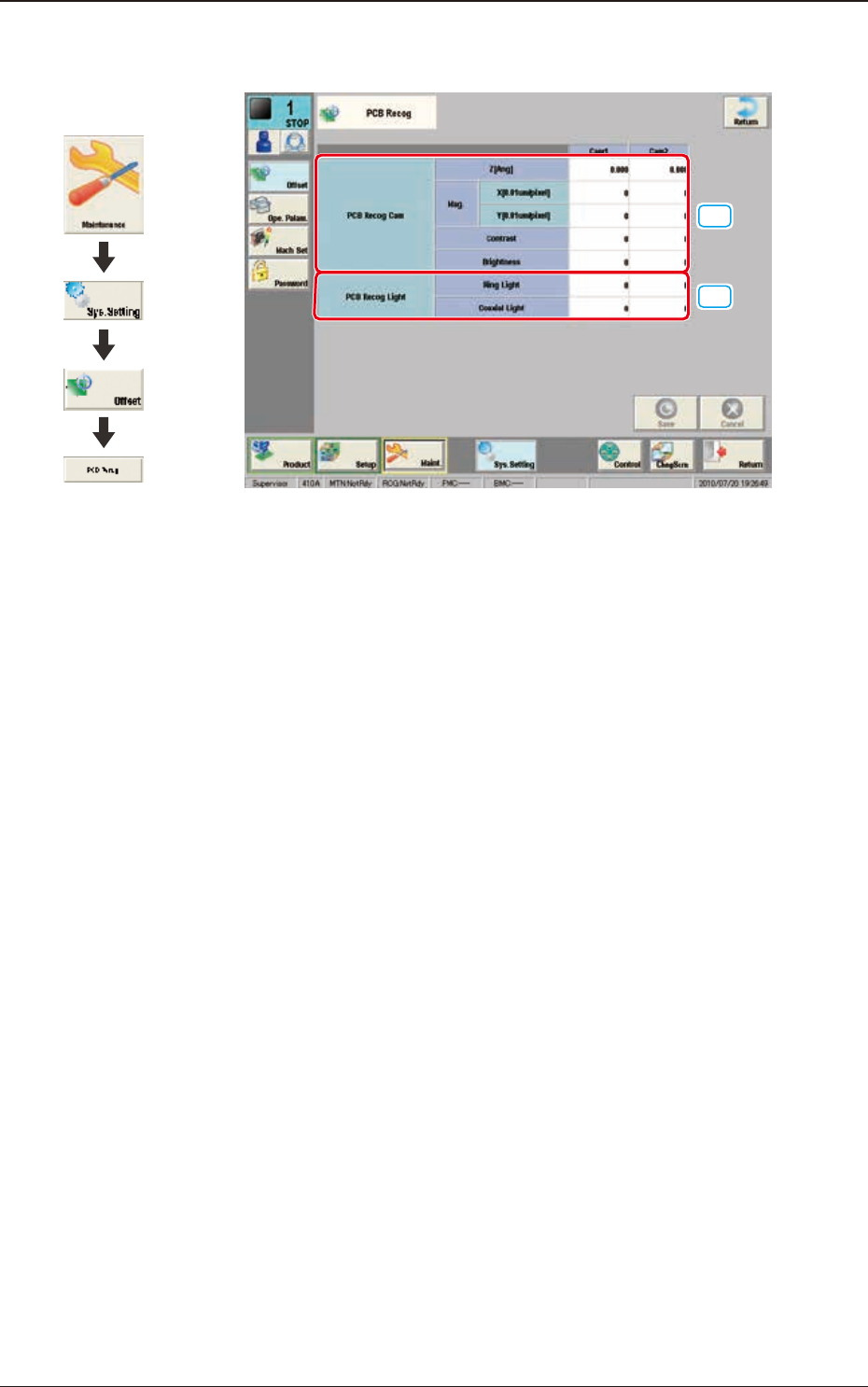
2.8 Schermata "PCB Recog"
[1]
[2]
F3B59
2.8 Schermata "PCB Recog"
Grafica dello
svolgimento
3OM-1842
2-601303-001
2.8 Schermata "PCB Recog"
Impostare i valori di compensazione che seguono per ciascuna telecamera.
[1] PCB Recog Cam
I parametri impostati sono utilizzati per regolare l'inclinazione orizzontale
della telecamera di riconoscimento PEC.
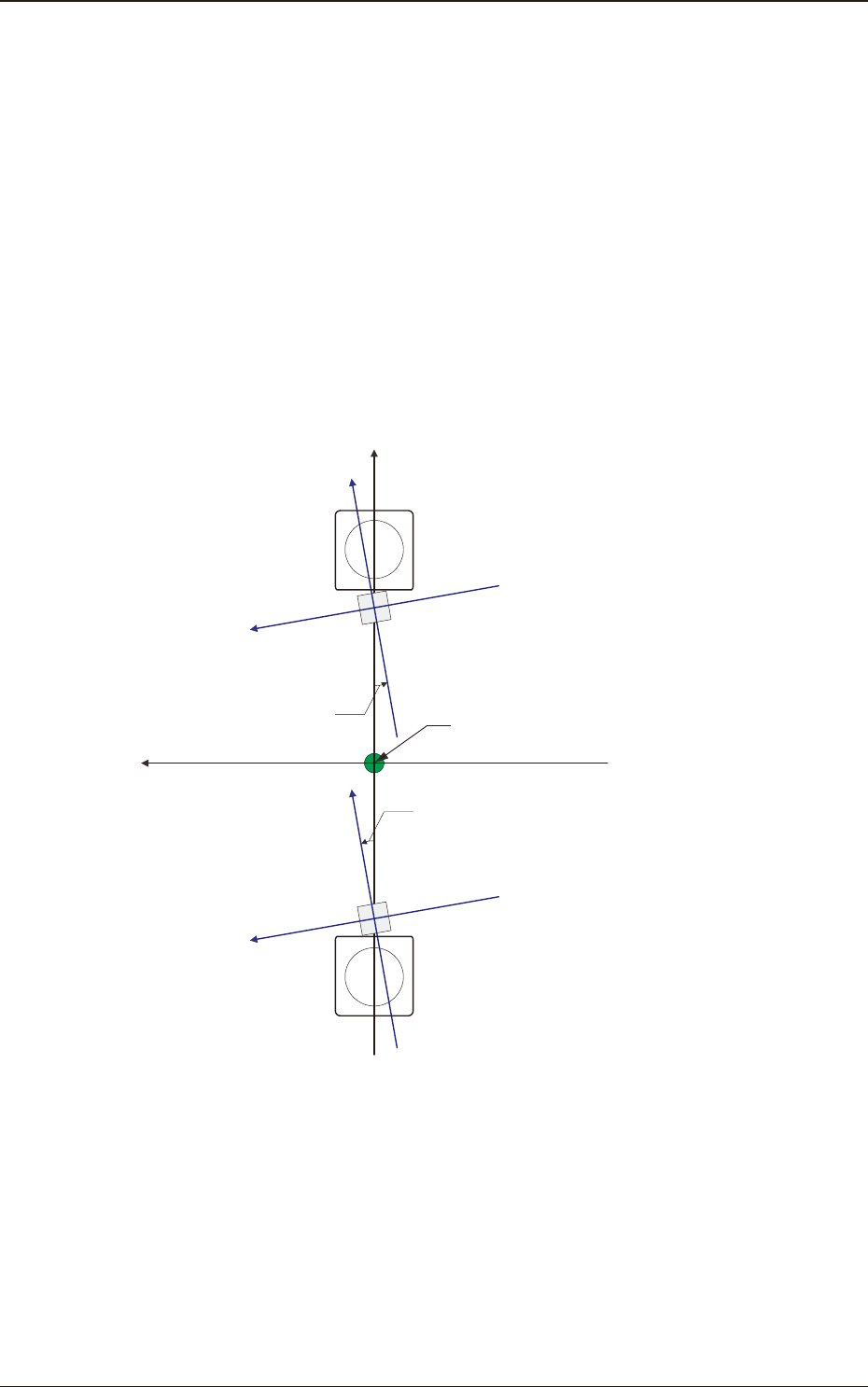
Z (Angle) [deg]
Impostare i parametri che rappresentano le deviazioni angolari nelle
coordinate di scansione delle telecamere di riconoscimento PEC in base alle
coordinate X/Y di riferimento della macchina (Xm-Ym).
Quando le coordinate di scansione della telecamera sono girate in senso
antiorario nel sistema di coordinate X/Y di riferimento della macchina, è
necessario apporre un segno più deve a ciascun dato compensazione.
Xm(+)
Ym(+)
Yc(+)
Xc(+)
Yc(+)
Xc(+)
Angolo della telecamera
di riconoscimento PEC
Xm-Ym
Xc-Yc
Angolo della telecamera
di riconoscimento PEC
Pm. Origine coordinate
di riferimento macchina
: Sistema di coordinate
di riferimento macchina
: Sistema di coordinate
telecamera di riconoscimento
PEC
F3B60