3OM-1842-002_G5S_Vol3.pdf - 第231页
3OM-1842 2-63 1303-001 2.9.1 Scheda "Comp. Recogn Cam" [1] [2] [3] [4] F3B62 [1] X (Orizzontale) e Y (V erticale) [mm] I parametri impostati sono utilizzati per regolare la deviazione di posizione in base alle …
3OM-1842
2-621303-001
2.9 Scheda "Comp. Recog"
[1]
[2]
[4]
[3]
F3B61
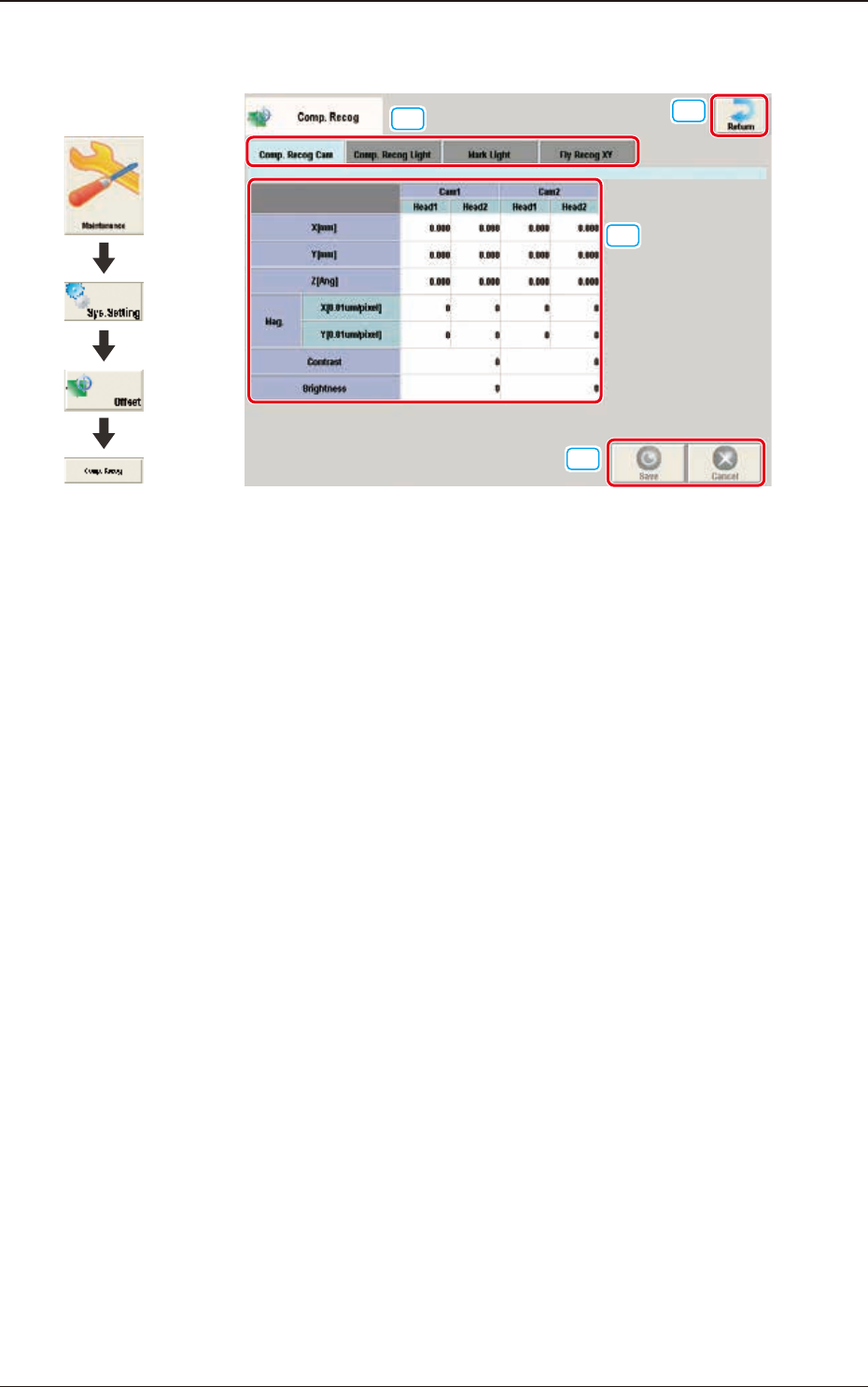
[1] Scheda di selezione compensazione
Quando è premuto questo tasto, sono visualizzati i dati di compensazione
della scheda selezionata.
[2] Sezione visualizzazione dati di compensazione
In questa sezione sono visualizzati i dati di compensazione selezionati al
punto [1].
[3] Tasto [Save]
Quando è premuto questo tasto, i dati inseriti sono salvati.
Tasto [Cancel]
Quando è premuto questo tasto, i dati inseriti sono annullati e si torna ai dati
salvati.
[4] Tasto [Return]
Quando è premuto questo tasto, si ritorna alla schermata "Offset Data".
2.9 Schermata "Comp. Recog"
Grafica dello
svolgimento
3OM-1842
2-631303-001
2.9.1 Scheda "Comp. Recogn Cam"
[1]
[2]
[3]
[4]
F3B62
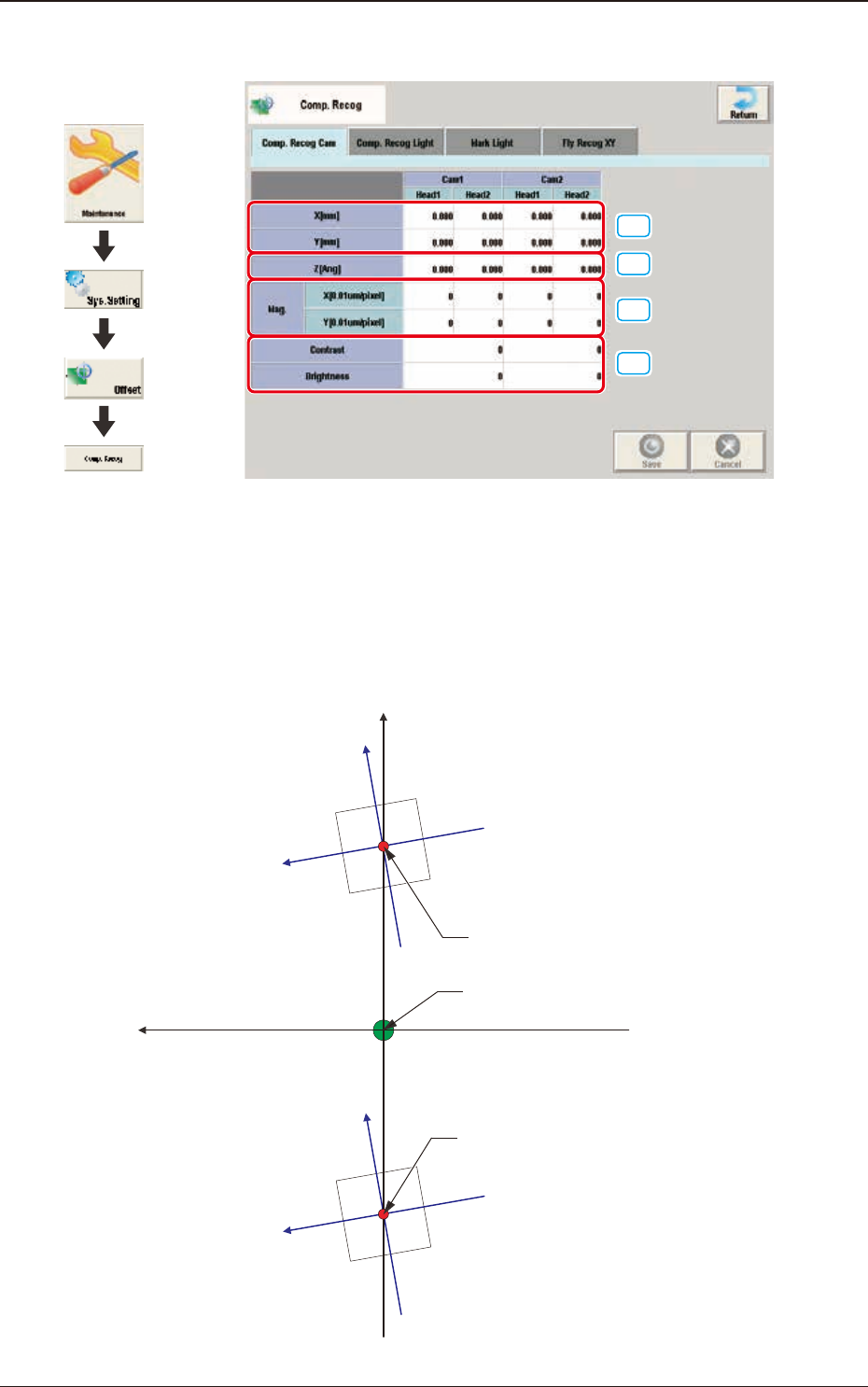
[1] X (Orizzontale) e Y (Verticale) [mm]
I parametri impostati sono utilizzati per regolare la deviazione di posizione
in base alle dimensioni di progettazione tra l'origine coordinate di riferimento
della macchina e il centro delle telecamere di riconoscimento.
Xm(+)
Ym (+)
Xc(+)
Yc(+)
Xc(+)
Yc(+)
Centro telecamera
di riconoscimento componenti
Centro telecamera
di riconoscimento componenti
Pm. Origine coordinate
di riferimento macchina
Xm-Ym
Xc-Yc
: Sistema di coordinate
di riferimento macchina
: Sistema di coordinate
telecamera di riconoscimento
componenti
F3B63
2.9 Schermata "Comp. Recog"
Grafica dello
svolgimento
3OM-1842
2-641303-001
2.9 Schermata "Comp. Recog"
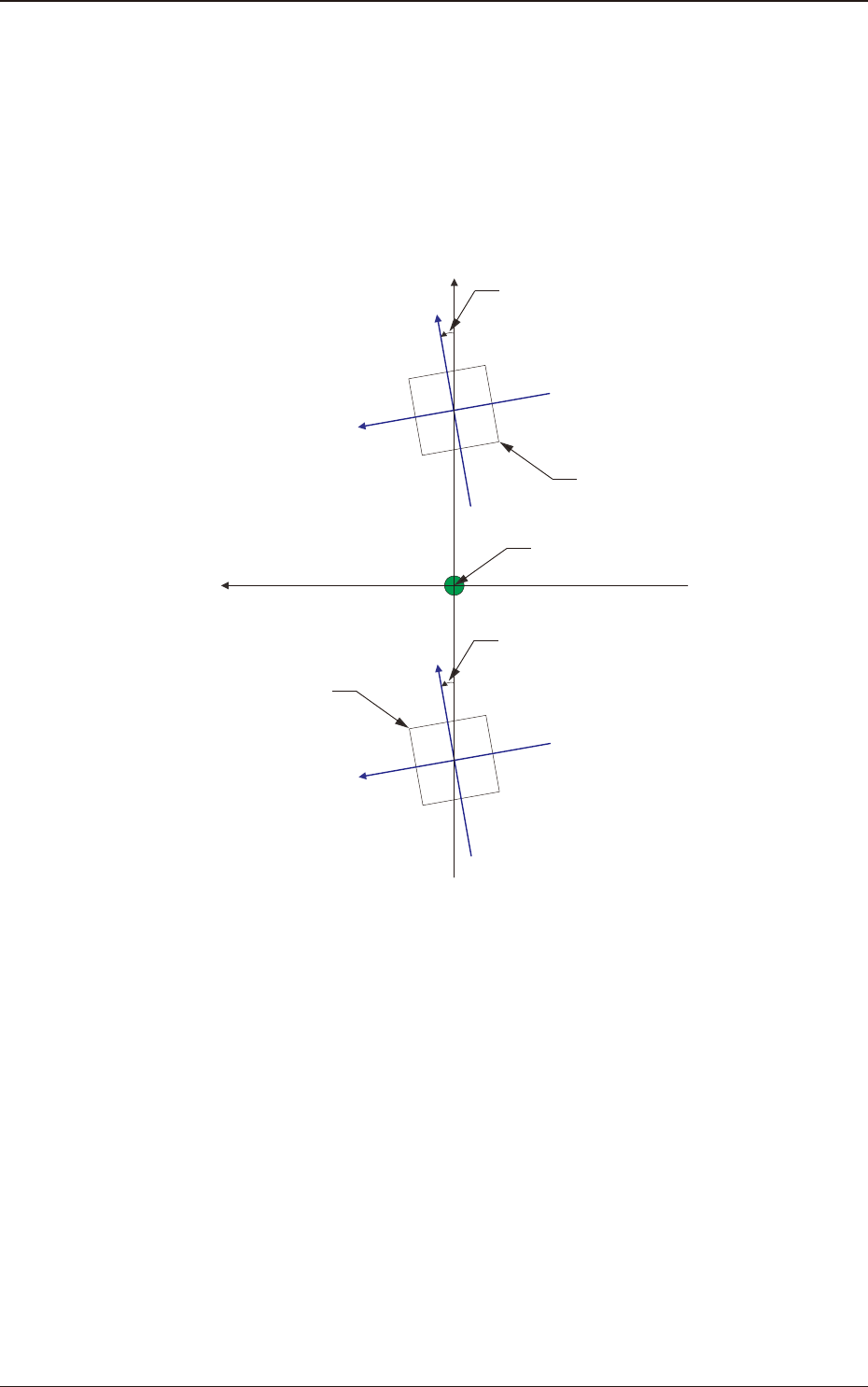
[2] Z (Angle) [Ang]
Impostare i parametri che rappresentano le deviazioni angolari nelle
coordinate di scansione delle telecamere di riconoscimento in base alle
coordinate X/Y di riferimento della macchina (Xm-Ym).
Quando le coordinate di scansione della telecamera sono girate in senso
antiorario nel sistema di coordinate X/Y di riferimento della macchina, è
necessario apporre un segno più deve a ciascun dato compensazione.
Xm(+)
Ym(+)
Xc(+)
Yc(+)
Xc(+)
Yc(+)
Angolo telecamera di riconoscimento
componenti
Angolo telecamera di riconoscimento
componenti
Telecamera di riconoscimento
componenti
Telecamera di riconoscimento
componenti
Pm. Origine coordinate
di riferimento macchina
Xm-Ym
Xc-Yc
: Sistema di coordinate
di riferimento macchina
: Sistema di coordinate
telecamera di riconoscimento
componenti
F3B64
[3] Mag. X (Orizzontale) e Y (Verticale) [0,01 µm/pixel]
Permette di impostare quanti micron devono corrispondere ad un pixel per
specicare l'ingrandimento della telecamera di riconoscimento.
Questo valore di compensazione è calcolato automaticamente mediante
l’apprendimento eseguito utilizzando il supporto di misurazione
dell'ingrandimento.
•
Impostazione predenita
: 6060