OPE-SFAB-005S0SmartFAB操作手册 - 第170页
7. 生产 OPE-SFAB-005S0 156 SmartFAB 操作手册 7.8 如何设定空转运转 如果要空转运转,那么在一般运 转模式的生产设定基础上,需要再 进行下面的 2 个设定。 1. 将生产预定数设定为无限制 。生产预定数的具体设定方法请参 照 「7.1.3 设定生产预定 数」 。 2. [ 装置信息 ] ‐[ 装置设定 ]‐[ 装置 功能设定 ]‐ 「Option」的 Fujitrax Verifie r 以 及 Fuj…
OPE-SFAB-005S0 7. 生产
SmartFAB 操作手册 155
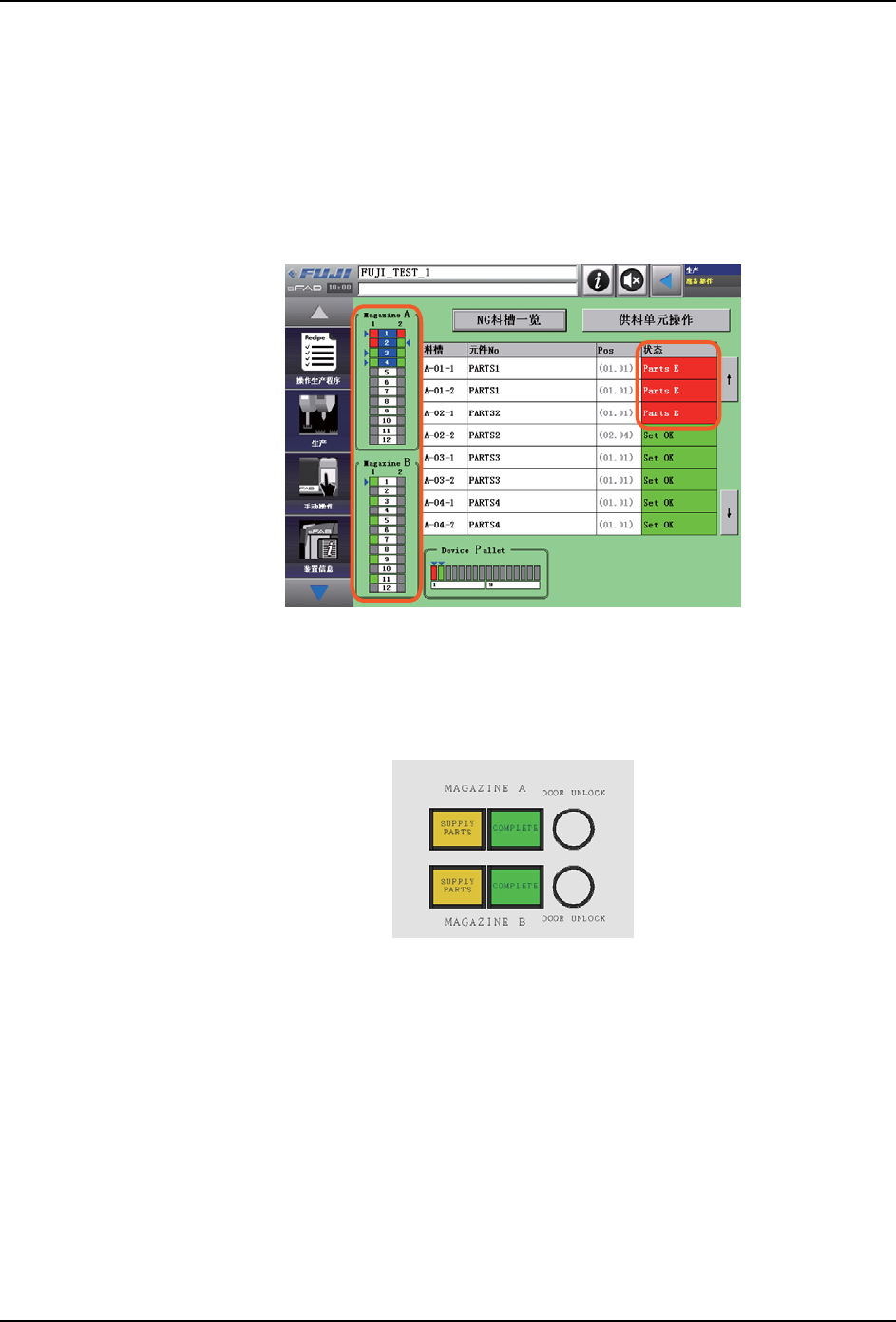
7.7.2 在生产过程中如何补充料盘元件
通常,生产中如果需要补充元件时会显示料尽,但是,[ 有事要离开机器,为了在离开机器
期间不发生料尽而停止,想要现在进行次料站的元件补充 ],在机器没有显示料尽的情况下
进行补充。这时,能够按照以下的步骤进行补充。
1. 在准备部件画面上,使用 [↑]/ [↓]按钮的操作,显示料盘供料群组 ([ 料盘箱
A] 或者 [ 料盘箱 B])。确认元件的状态。
备注 )状态栏中所显示的状态详细内容,请参照 「10.1 供料单元 状态的种类和含义」。
2. 如果存在想要进行补充的料盘箱,请按下料盘单元的 SUPPLY PARTS 按钮。
料盘箱进行退避,门的锁定被解除,处在能够补充元件的状态。
备注 )如果是能够操作的状态,SUPPLY PARTS 按钮会亮灯。
备注 )料盘箱的退避是在生产动作的间歇进行,所以请等待料盘箱的退避。料盘箱完成退避
后,退避的料盘箱的 SUPPLY PARTS 按钮会熄灯。
3. 请进行料盘元件的补充。
备注 )各供料装置 (料盘)的详细补充方法请参照 「6.7 如何安装料盘」。
39OPE-0195-S
39OPE-0196
CoaQ1DBp
CoaQ1DBp
Downloaded at 2015/10/08 22:10:586 by 3NEC4804 DL#XBovDH4m
Downloaded at 2015/10/08 22:10:586 by 3NEC4804 DL#XBovDH4m
7. 生产 OPE-SFAB-005S0
156 SmartFAB 操作手册
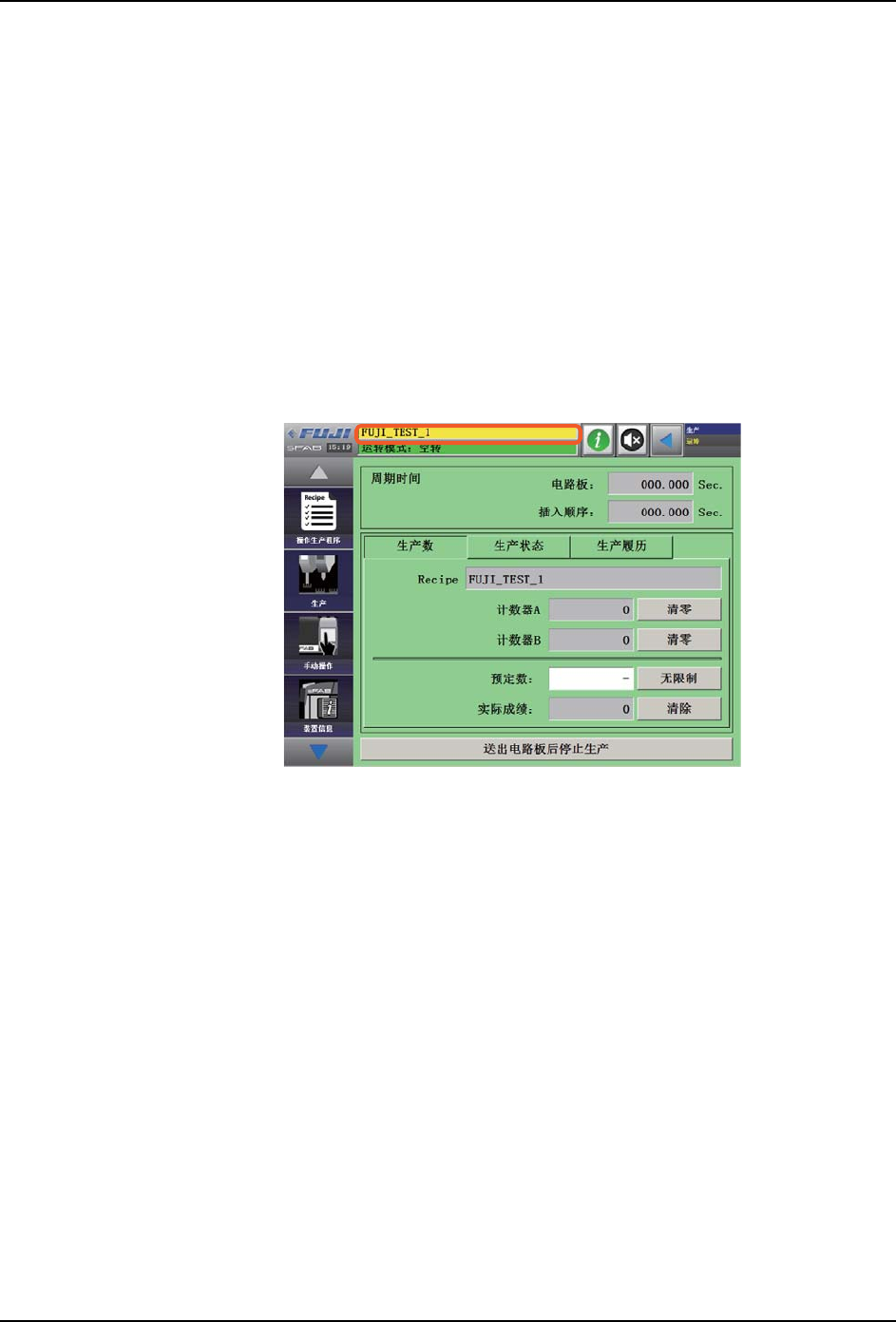
7.8 如何设定空转运转
如果要空转运转,那么在一般运转模式的生产设定基础上,需要再进行下面的 2 个设定。
1. 将生产预定数设定为无限制。生产预定数的具体设定方法请参照 「7.1.3 设定生产预定
数」。
2. [ 装置信息 ]‐[ 装置设定 ]‐[ 装置功能设定 ]‐ 「Option」的 Fujitrax Verifier 以
及 Fujitrax Profiler 功能设定为 OFF。具体设定方法请参照 「9.3.2 设定
「Option」」。
下面为注意事项。
·在打开的生产程序中没有安装指定的装置结构 ( 单元/ Tool /供应 app( 供料器
/料盘 )) 时,不能进行空转运转。( 不必安装元件。)
另外,当运转模式为空转时,页眉画面的生产程序名称的区域背景色显示为黄色。
39OPE-0387-Sa
CoaQ1DBp
CoaQ1DBp
Downloaded at 2015/10/08 22:10:586 by 3NEC4804 DL#XBovDH4m
Downloaded at 2015/10/08 22:10:586 by 3NEC4804 DL#XBovDH4m
OPE-SFAB-005S0 8. 关于手动操控
SmartFAB 操作手册 157
8. 关于手动操控
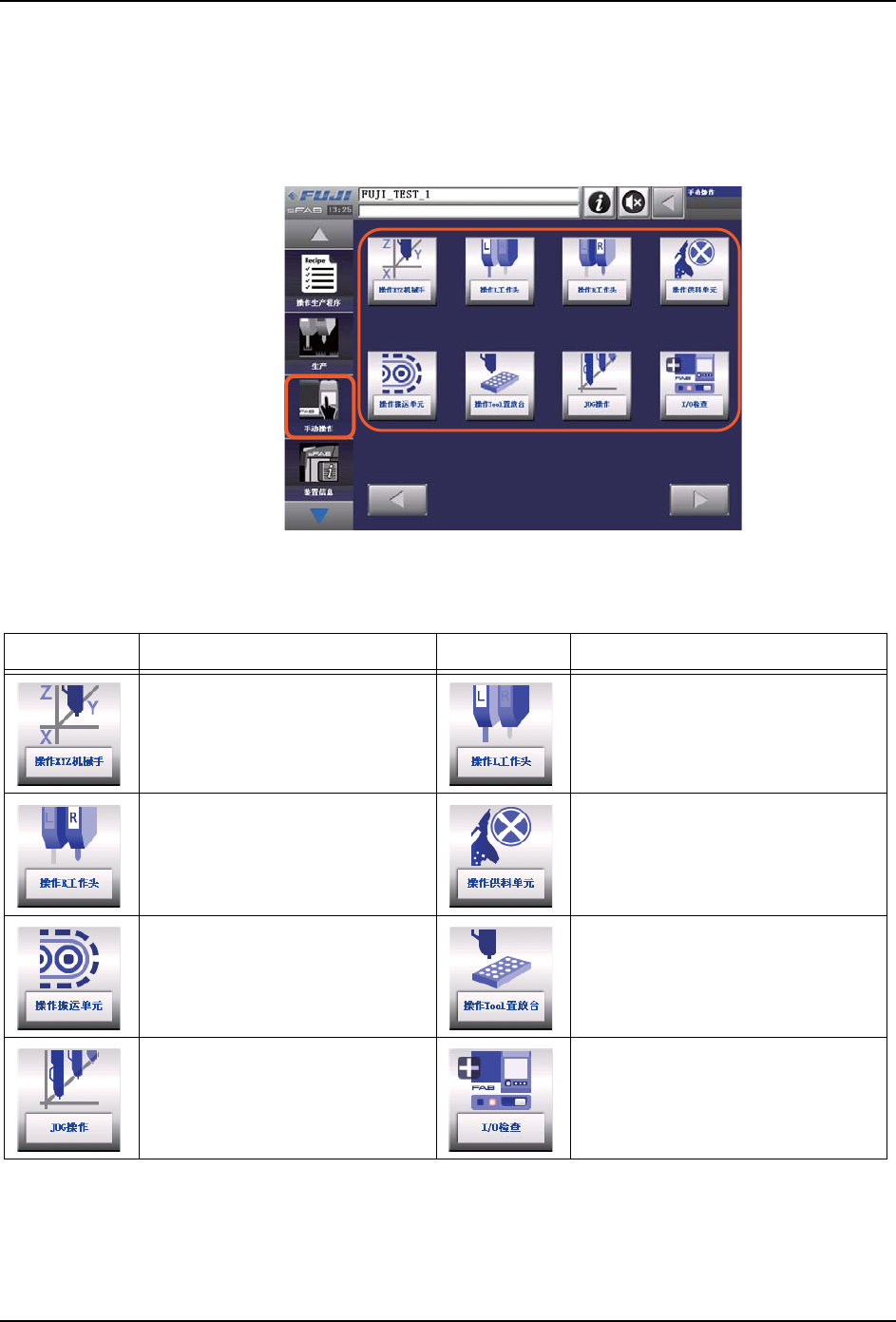
8.1 关于操控画面
在操作面板 [手动操作]功能菜单上,能够显示手动操作的各画面。
手动操作功能菜单画面
功能说明 (按钮)
另外,在 XYZ 机械手操作、 L 工作头操作、 R 工作头操作、供料单元操作、搬运轨道操
作、 Tool 置放台操作的各画面上,准备了共通按钮 (高度方向退避、供料单元松开)。
39OPE-0197-S
按钮 说明 按钮 说明
是进行 XYZ 机械手的手动操作的功
能。在进行退避位置移动和维修保养
位置移动时使用。
是进行 L 工作头上安装的工作头单元的
手动操作的功能。在画面上除了显示移
动到工作头更换位置及工作头卸下/安
装操作,还显示对应所安装的工作头的
操作。
是进行 R 工作头上安装的工作头单
元的手动操作的功能。在画面上除了
显示移动到工作头更换位置及工作头
卸下/安装操作,还显示对应所安装
的工作头的操作。
是进行所连接的供料单元的手动操作的
功能。在画面上显示原点复位操作等对
应连接供料单元的操作项目。
是进行所设置的搬运轨道的手动操作
的功能。在画面上显示原点复位、工
件载入/送出等对应所连接的搬运轨
道的操作项目。
是进行 Tool 置放台相关的手动操作的
功能。在进行挡板开/闭、置放台上升
/下降、 Tool 识别/安装/返却等时
使用。
是进行 JOG 操作的功能。对象是
XYZ 机械手、 L 工作头、 R 工作头、
搬运轨道。另外,作为附属功能,存
在对应工作头的 Z 轴制动设定、
JOG 操作中的影像监视器功能。
是监视各单元的电路板上的输入输出信
号的状态的功能。
此功能,通常不需要用户进行操作。
CoaQ1DBp
CoaQ1DBp
Downloaded at 2015/10/08 22:10:586 by 3NEC4804 DL#XBovDH4m
Downloaded at 2015/10/08 22:10:586 by 3NEC4804 DL#XBovDH4m