OPE-SFAB-005S0SmartFAB操作手册 - 第180页
8. 关于手动操控 OPE-SFAB-005S0 166 SmartFAB 操作手册 8.8 如何执行 JOG 操控 在 [手动操作]功能菜单中,按下 [ JOG 操作] ,则会显示 JOG 操作用的画面。对于此画 面上所显示的操作项目,能够进 行 JOG 操作。 8.8.1 关于 JOG 操控的画面 JOG 操作是以低于通常运转的低速并 且反复短距离移动,操作各马达轴 的功能。 对于 XYZ 机械手、 L 工作头、 R 工作头、搬运轨…
OPE-SFAB-005S0 8. 关于手动操控
SmartFAB 操作手册 165
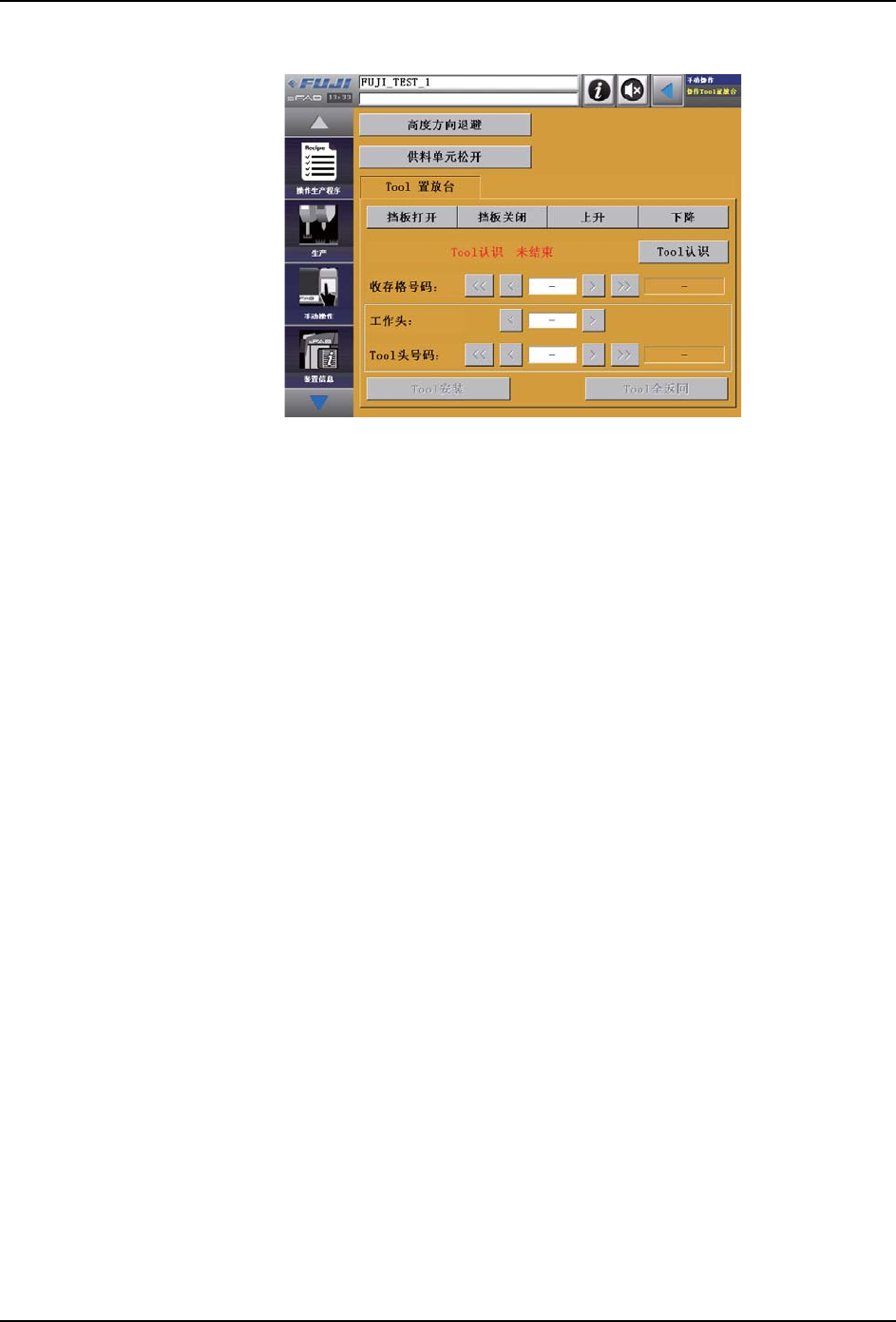
画面介绍
操控 Tool 置放台的画面 (Tool 识别未完成)
未完成 Tool 识别时,显示上述的画面。
39OPE-0205-S
CoaQ1DBp
CoaQ1DBp
Downloaded at 2015/10/08 22:10:586 by 3NEC4804 DL#XBovDH4m
Downloaded at 2015/10/08 22:10:586 by 3NEC4804 DL#XBovDH4m
8. 关于手动操控 OPE-SFAB-005S0
166 SmartFAB 操作手册
8.8 如何执行 JOG 操控
在 [手动操作]功能菜单中,按下 [JOG 操作],则会显示 JOG 操作用的画面。对于此画
面上所显示的操作项目,能够进行 JOG 操作。
8.8.1 关于 JOG 操控的画面
JOG 操作是以低于通常运转的低速并且反复短距离移动,操作各马达轴的功能。
对于 XYZ 机械手、 L 工作头、 R 工作头、搬运轨道,进行 JOG 操作。
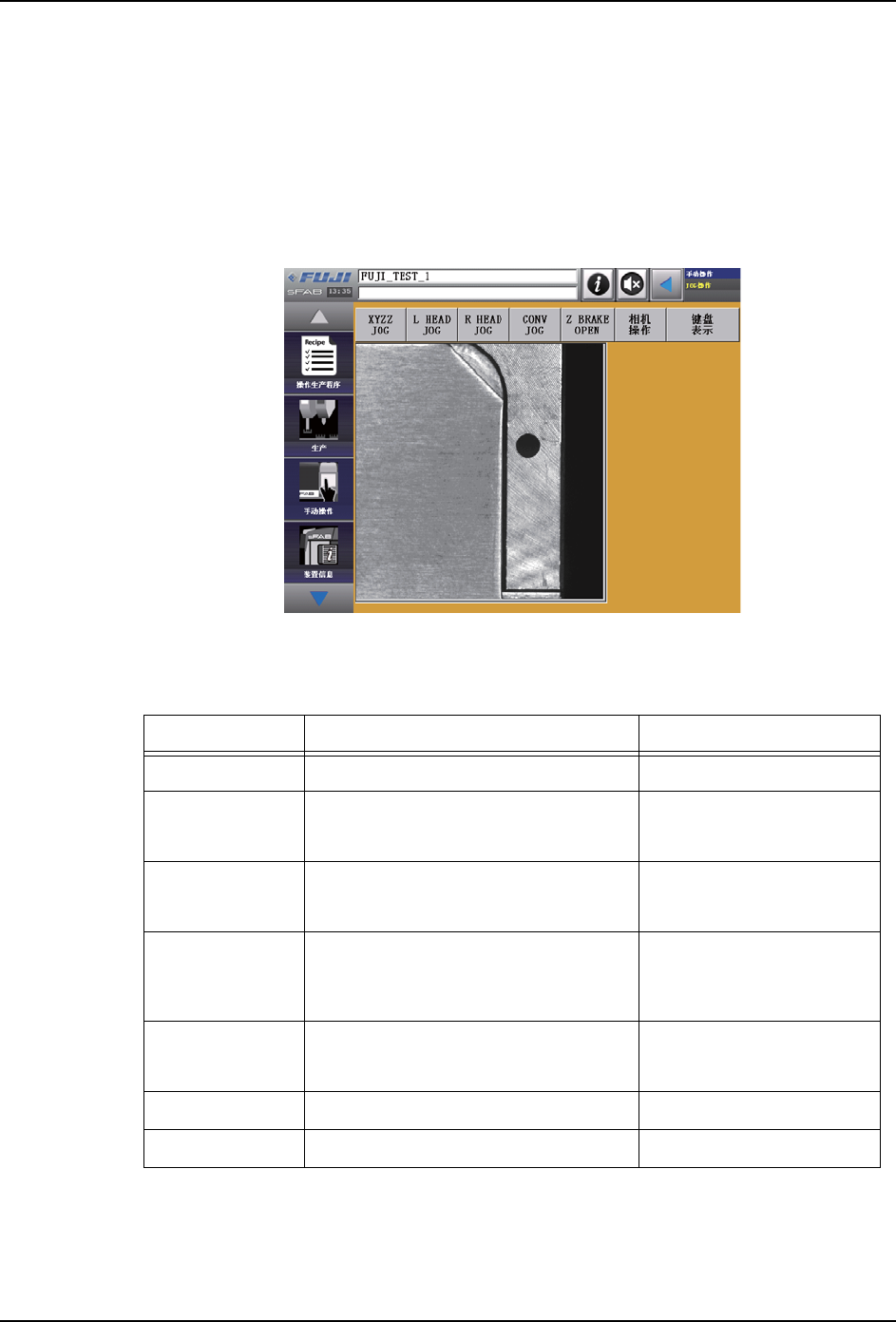
JOG 操作画面
画面说明
按钮 说明 备注
[XYZ JOG] 显示 XYZ 机械手用的 JOG 操作画面。 单元未连接时,不能操作
[L HEAD JOG] 显示 L 工作头用的 JOG 操作画面。
另外,操作项目根据安装工作头而不同。
单元未连接时,不能操作
[R HEAD JOG] 显示 R 工作头用的 JOG 操作画面。
另外,操作项目根据安装工作头而不同。
单元未连接时,不能操作
[CONV JOG] 显示搬运轨道用的 JOG 操作画面。
另外,操作项目根据安装搬运轨道而不
同。
单元未连接时,不能操作
[Z BRAKE OPEN] 显示 Z 轴制动设定画面。
另外,操作项目根据安装工作头而不同。
单元未连接时,不能操作
[相机操作] 显示影像监视器用的相机操作画面。 单元未连接时,不能操作
[键盘表示] 显示相机操作等的键盘输入用的键盘。
39OPE-0206-S
CoaQ1DBp
CoaQ1DBp
Downloaded at 2015/10/08 22:10:586 by 3NEC4804 DL#XBovDH4m
Downloaded at 2015/10/08 22:10:586 by 3NEC4804 DL#XBovDH4m
OPE-SFAB-005S0 8. 关于手动操控
SmartFAB 操作手册 167
8.8.2 如何执行 XYZ 机械手的 JOG 操控
在 JOG 操作画面上,按下 [XYZ JOG]按钮,则会显示 JOG 操作用的画面。
在进行了所需的动作设定后,按下 START 按钮, XYZ 机械手进行动作。
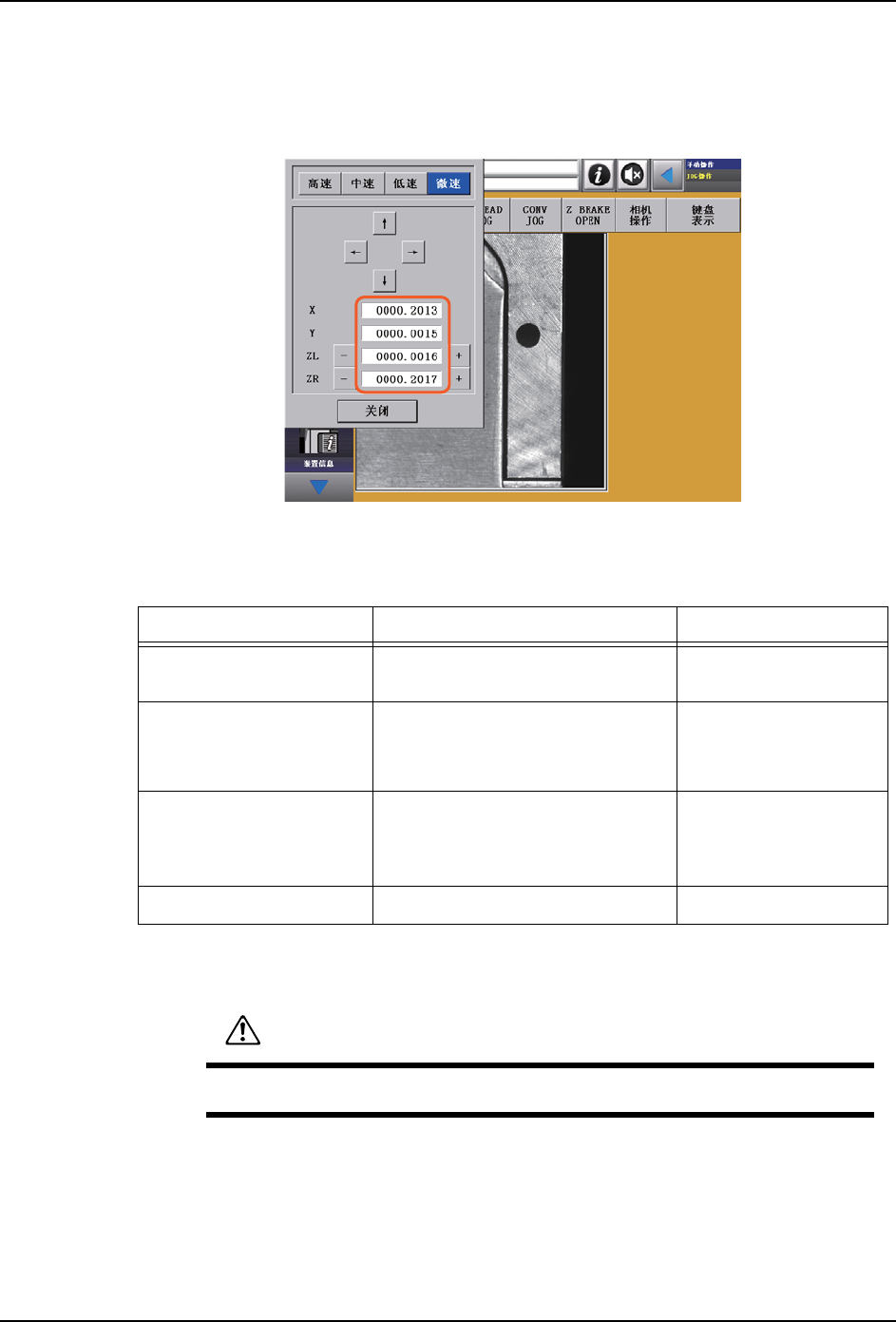
XYZ JOG 操作画面显示例
画面说明
注意 )
画面上所显示的动作设定项目根据连接中的单元而不同。上述画面是举例介绍操作项目的画面,
有可能与用户的产品不一致。
按钮 说明 备注
[高速][ 中速][ 低速]
[微速]
选择移动速度。
「X」「Y」「ZL」「ZR」 显示 X 轴、Y 轴、ZL 轴、ZR 轴的
现在位置。
单位是 【mm】。
ZL 表示左
ZR 表示右
「ZL」:[-][+]
「ZR」:[-][+]
「X」 :[←][→]
「Y」 :[↑][↓]
按照通用坐标系,设定各移动位
置。
在①中显示现在的位
置。
[关闭] 关闭 XYZ JOG 操作画面。
注意
有可能碰到 Tool 置放台。操作时请务必下降 Tool 置放台,然后进行操作。
39OPE-0207-S
CoaQ1DBp
CoaQ1DBp
Downloaded at 2015/10/08 22:10:586 by 3NEC4804 DL#XBovDH4m
Downloaded at 2015/10/08 22:10:586 by 3NEC4804 DL#XBovDH4m