KE2010.Instruction Manual.Ver.2.01,Rev.08.pdf - 第41页
1 − 24 1.2.2 PWB transfer unit: mechanism and parts identification 1. Pin reference 1) W hen a board is carried in and the I N sensor ① detects the board, t he PW B transport motor ⑦ dr ives the drive shaft ⑧ to start t …
1 − 23
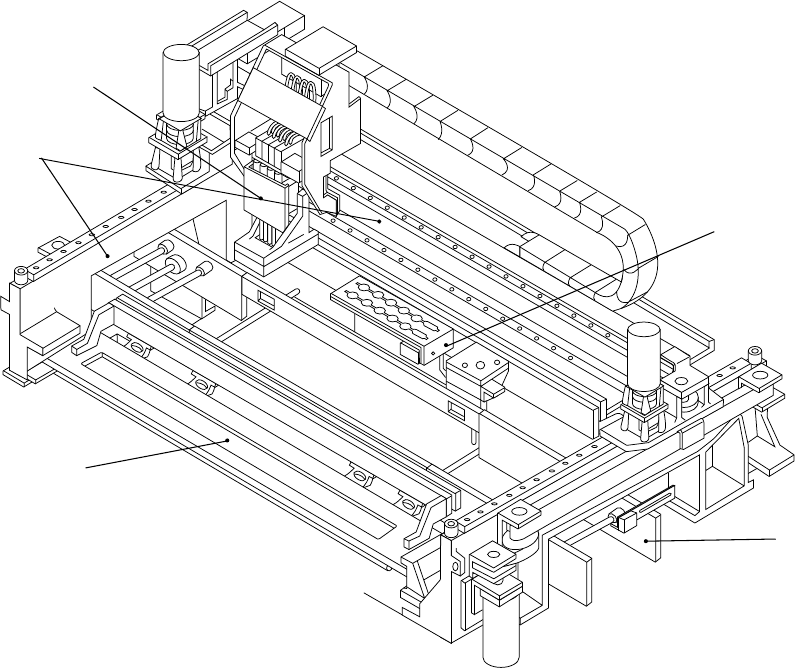
Figure 1.2.1.3
①
ATC unit
④
PWB transfer unit
②
Head unit
⑤
Feeder bank unit
③
X-Y unit
①
④
⑤
③
②
1 − 24
1.2.2 PWB transfer unit: mechanism and parts identification
1. Pin reference
1) When a board is carried in and the IN sensor ① detects the board, the PWB
transport motor ⑦ drives the drive shaft ⑧ to start transporting the board
with the PWB transport belt. At the same time, the stopper ⑨ is turned on.
2) When the board reaches the stopper ⑨, the STOP 3 sensor detects it, then
the BU plate ⑫ moves up. The board is fixed with the centering pin ⑪ and
BU pin ⑭ which are attached on the BU plate ⑫.
3) After the board is fixed, the next board is carried in the same manner, and it
waits at the Wait sensor ⑯.
4) After production finishes, the fixed board is released, then the machine starts
ejecting it.
5) When the first board passes the C-OUT sensor ④, the stopper is turned on
again and the next board is fixed.
2. Edge reference <Optional>
The board transfer mechanism is the same as that of the pin reference above.
When the board is fixed, edges of the boards are held by the stopper ⑨ pusher,
X ⑩ (in the X direction) pusher, ⑮ (in the Y direction) and BU pin ⑭.
The transfer operation that follows is also the same as that of the pin reference
above.
1 − 25
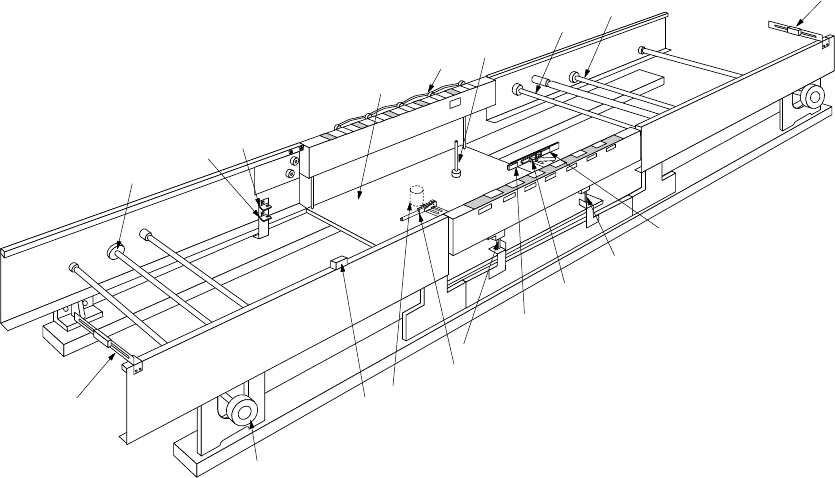
Figure 1.2.2.1
①
IN sensor
⑨
Stopper
②
OUT sensor
⑩
Pusher X (Edge reference option)
③
STOP sensor
⑪
Centering pin
④
C-OUT sensor
⑫
BU table
⑤
BU-UP sensor
⑬
Motor control
⑥
BU-DOWN sensor
⑭
BU pin
⑦
PWB transport motor
⑮
Pusher Y (Edge reference option)
⑧
Drive shaft
⑯
Wait sensor
①
⑦
⑯
⑬
⑩
⑪
③
⑨
⑪
④
②
⑧
⑧
⑭
⑮
⑫
⑤
⑥
⑧