KE-1070使用说明书.pdf - 第130页
第1部 基本篇 第2章 生产 2-26 2-7-1-2 传送轨道宽度的调整 1) 采用手动宽度调整(标准)时 <步骤> 1. 请调整传送的宽度。 在调整杆 20 上安装手柄 21 ,将传送的宽度调整至基板能顺利通过的宽度(“基板宽度+0.5 mm~1mm”)。 2. 请确认整个传送轨道范围内,基板都能顺利通过。 3. 调整完成后,请卸下手柄。 2) 采用自动宽度调整(AWC、选购件)时 也可打开生产程序文件,在“基板宽度自动…
第1部 基本篇 第2章 生产
2-25
2-7-1-1 传送部的构成
1. 当为“销基准”时
1) 基板被搬入,IN 传感器①检测出基板后,传送马达⑦将驱动驱动轴⑧,通过传送带开始传送。
同时,挡块⑨将变为 ON。
2) 当基板到达挡块⑨时,被停止传感器③检测出,支撑台面⑫
上升。此时,基板被安装在支撑
台面⑫上的定心销⑪
、支撑销⑭所固定。
3) 固定后,下一块基板同样被送进,在待机传感器⑰
的位置等候。
4) 生产完成后解除固定,开始搬出。
5) 最初的基板在通过 C-搬出传感器④时,挡块⑨再次变为 ON,下一块基板则被固定。
2. 当为“外形基准”时
搬入动作与销基准时相同,在固定时,由挡块⑨、夹杆 X⑩(X 方向)、夹杆 Y⑮
(Y 方向)、支撑销
⑭
固定。
搬出动作与销基准时相同。
★
★
★
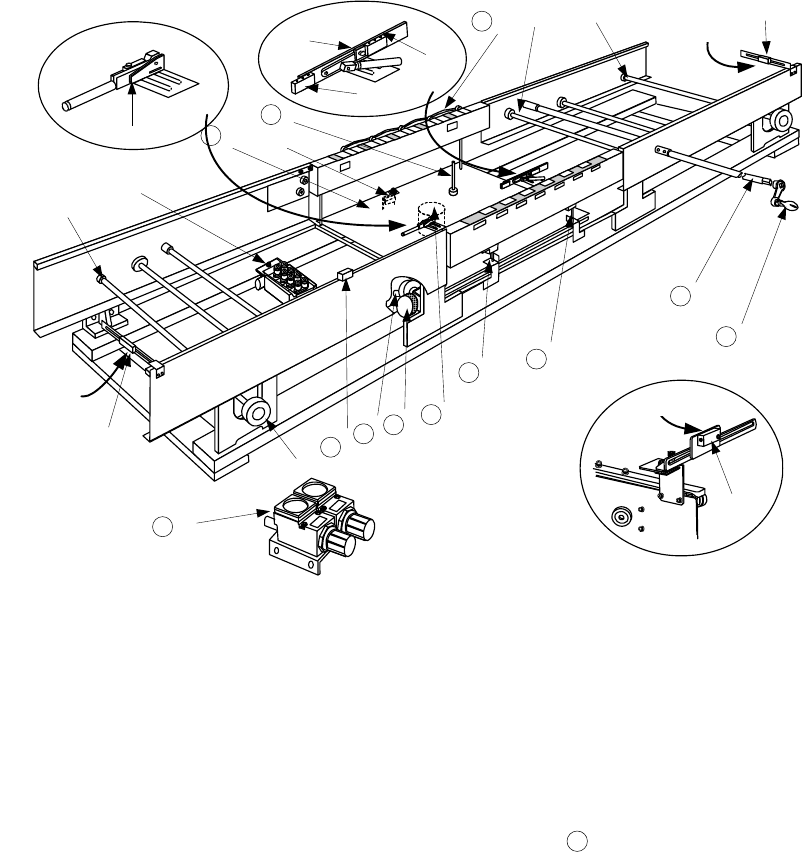
图 2.7.1.1 基板传送
① IN 传感器 ⑧ 驱动轴 ⑮ 夹杆 Y(外形基准用)
② 搬出传感器 ⑨ 挡块 ⑯ 减压阀(外形基准用)
③ 停止传感器 ⑩ 夹杆 X(外形基准用) ⑰ 等待传感器
④ C-OUT 传感器 ⑪ 定心销 ⑱ 调整手柄
⑤ 支撑台原点传感器 ⑫ 支撑台 ⑲ 调整挡块
⑥ 传送电磁阀 ⑬ 马达 ⑳ 调整杆
⑦ 传送马达 ⑭ 支撑销 21 手柄
⑦
⑩
⑨
②
⑧
⑧
⑤
⑥
①
③
④
⑧
15
16
17
18
19
13
11
11
20
21
①
②
14
12
★
★
★
第1部 基本篇 第2章 生产
2-26
2-7-1-2 传送轨道宽度的调整
1) 采用手动宽度调整(标准)时
<步骤>
1. 请调整传送的宽度。
在调整杆
20
上安装手柄
21
,将传送的宽度调整至基板能顺利通过的宽度(“基板宽度+0.5
mm~1mm”)。
2. 请确认整个传送轨道范围内,基板都能顺利通过。
3. 调整完成后,请卸下手柄。
2) 采用自动宽度调整(AWC、选购件)时
也可打开生产程序文件,在“基板宽度自动调整”(AWC,选项)画面上进行调整。这里就下列
“生产”—“传送·I/O 状态”画面,讲述从画面上进行调整的方法。
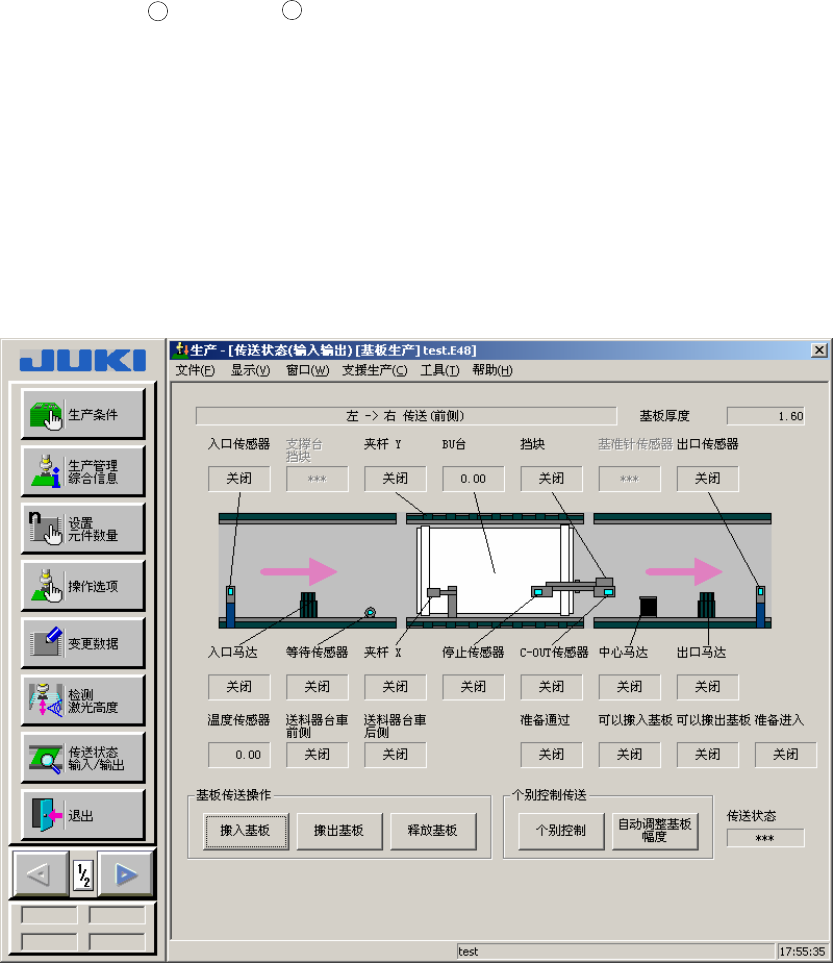
1. 请启动“生产”。
2. 在菜单栏点击“窗口”—“传送·I/O 状态”
图 2-7-1-2-1 传送·I/O 状态(生产空运行状态)
第1部 基本篇 第2章 生产
2-27
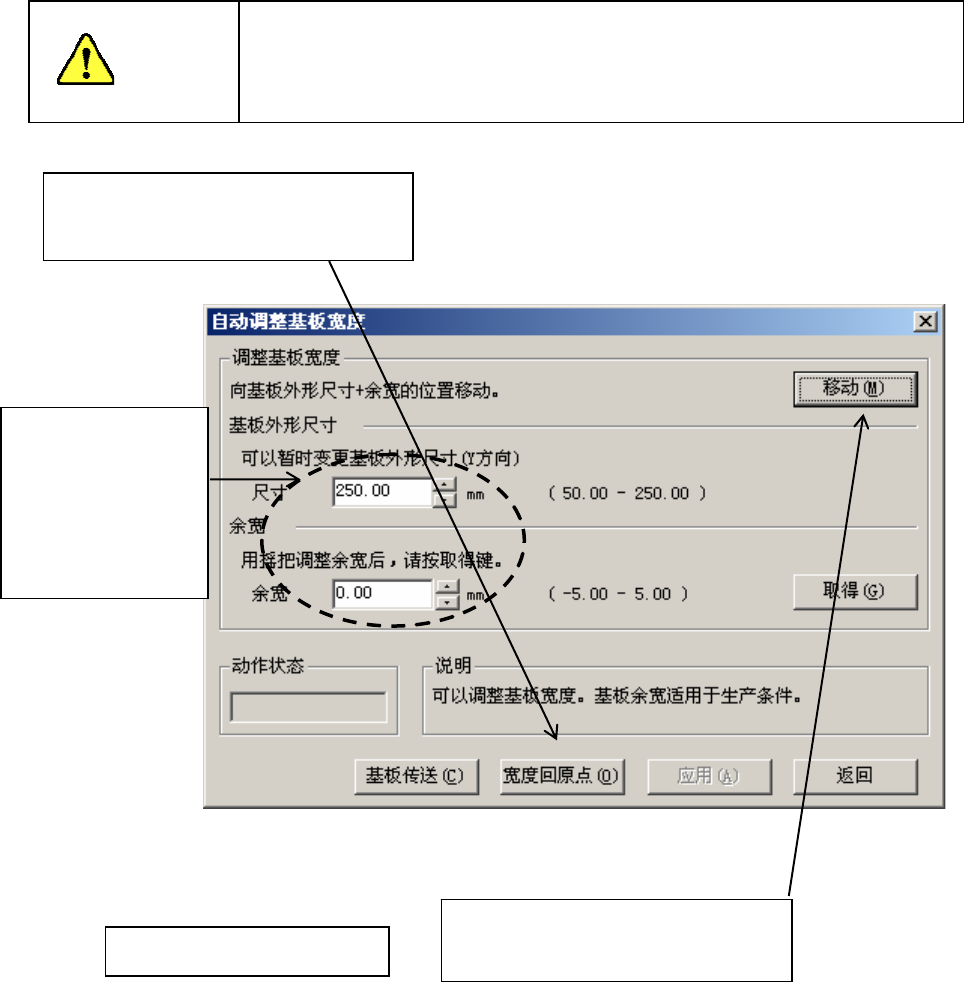
3.请对准传送宽度尺寸。
选择画面右下角的“自动调整基板幅度”,即可显示出“自动调整基板幅度”画面。
按以下说明点击“移动”后,传送功能随之启动。点击之前,务必确认传送活
动区域没有妨碍物体。
图 2-7-1-2-2 基板宽度自动调整 (AWC,选项)
注意
②输入“尺寸、“余
宽”。
(“余宽”幅度大约
为+0.5mm
〜
1mm。)
③请点击“移动”,调整宽度。
马达随之启动,进行宽度调整。
④确认传送是否通畅。
①点击“宽度回原点”,实行传送返回
原点。